直流电阻率法与工作面透明化
2022-06-16饶荣富苏本玉
饶荣富,苏本玉
(中国矿业大学(徐州) 资源与地球科学学院,江苏 徐州 221116)
0 引言
我国煤矿智能化生产在不断加快,根据国家规划,到2025年全部大型煤矿基本实现智能化[1]。而煤矿智能化建设的关键就是实现透明工作面,这也是地球物理探测理论与技术在煤炭资源开采领域的具体应用体现。要将真实的综采工作面形成一个数字化的工作面煤层地质模型,需要收集全面、准确、具体的煤层结构信息、地理参数信息、煤岩关系信息、地质演化信息等[2]。煤矿安全生产和智能化建设离不开物探技术的勘察。其中,矿井直流电阻率法具有稳定性、抗干扰能力强,对低阻体和高阻体都有灵敏的反映能力等优势,对煤层顶底板隐伏含水构造、巷道迎头前方潜在突水异常探测效果明显[3-5]。
从20世纪90年代开始,直流电阻率法的研究方向主要集中在煤矿突水这一突出问题上[6]。国外用于低阻煤层小构造探测的巷道间直流电透视技术、巷道侧帮电测深和电剖面技术较为成熟[7];而国内的矿井电法技术主要用于掘进迎头和巷道顶、底板构造探查,并且将高密度电阻率法和断面测深技术用于煤矿井下,通过减小接地电阻等压制井下强地电干扰的方法,解决了井下施工的技术难题[8]。鲁晶津[9]通过正反演得到合适参数,并应用到工作面底板水探查的实际工程中,圈定出岩层富水区。2020年,高卫富等[10]丰富了环工作面三维直流电法工作理论,推导得到环工作面三维直流电法深度坐标公式,采用对角偶极装置分别进行数值模拟和实际应用分析,提高了环工作面三维直流电法的灵敏度和反演分辨率。
矿井直流电阻率法发展迅速、应用广泛,但由于巷道空间的限制,电极布设受到很大影响,传统的排列方式采集的三维直流电法数据存在分辨率较低的问题,很难实现工作面的透明化[11-12]。因此在考虑巷道空间限制以及环工作面的条件背景下,围绕直流电阻率法在矿井中对于工作面以及巷道迎头的异常探测时的工作方式,以数值正、反演模拟的方法进行介绍。
1 三维直流电法正反演理论
1.1 三维直流正演理论
1.1.1 三维直流正演理论
在进行直流电法数值模拟时,为了降低电源附近电位的误差,通常使用二次场的方法[13-14],将模型的电导率分为背景电导率σ1和异常体电导率σ2,二者产生的场分别为一次场v1和二次场v2,二者相加即为总场。对于全空间内一点电源A,其电流强度为I,在全空间内建立球坐标系,由拉普拉斯方程可推导空间中某点M的点位满足:
(1)
其中:R为点M与源A的距离。求解该微分方程,得直流点电源在全空间内任一点产生的电位为:
(2)
其中:ρ为电阻率;I为电流强度。得到直流电法二次场的边值方程组:
(3)
1.1.2 三维网格剖分
无论是使用专业软件还是编写的模拟程序,网格剖分都是非常基础也是重要的一步。网格的精细程度直接决定了数值结果的精度以及求解得速率。通常在网格剖分时,对于背景区域以及边界区域可以使用大体积网格,而在异常模型和点电源、测点附近则可以使用细小的网格,这样求解的目标区域的精度能够保证,总体的网格数目也不会超出计算机的承受范围,对于后续的运算求解有很大的益处[15]。在单元划分过程中,采用非均匀划分的方法,对研究的目标区域细化,靠近边界区域粗化,如图1所示。每个网格单元为四面体,对每个四面体上的4个节点进行编号,如图2所示。

图1 网格剖分示意Fig.1 Mesh splitting schematic

图2 四面体单元格示意Fig.2 Schematic diagram of tetrahedron cells
这样,全空间区域和边界Γ∞的积分可分为所有四面体单元e和Γe之和,即:
(4)
1.2 三维直流反演理论
在20世纪20年代,电阻率法反演理论就开始建立,经过发展,电阻率反演方法与形式不断演变。从早期的阻尼最小二乘法、高斯牛顿法、模拟退火法、神经网络法到现在的最小构造反演法、电性锐变边界模型反演法;从早期的地面电阻率二维反演到后期的井下全空间三维电阻率反演。三维反演方法现在通常使用线性反演方法,其思想是在测量数据和物理模型之间建立某种函数关系,在这种函数关系上要有特定的解存在,通过参数置换法和泰勒级数展开法把非线性问题转换为线性问题,特别是对多维反演有收敛性,目前线性反演理论成熟、效果最好、应用最广泛[16]。
2 矿井直流电法正、反演
2.1 工作面内探测正、反演
2.1.1 工作面探测工作方法
对于U形综采工作面探测时,可将电极布设在工作面上或是工作面与巷道的连接处,这样确保电流能主要流向回采方向内的介质。考虑实际巷道的长度以及井下布极条件,电极的间隔可设计为5 m或10 m,电极沿着工作面走向布设为U形,见图3。此布极方式能充分利用电极分布宽度,使探测盲区尽量小。
由于探测工作面所使用的U形电极排列所需求的电极数目较多,为了增加采集效率、减小探测盲区,需要选择合适的观测方式。考虑所使用的正演软件特性以及电极布设方式,采用温纳装置进行跑极观测。观测时采用不同的电极间隔系数跑极,这样在一个剖面上所测的点是逐层分布的,形成的断面图为等腰倒梯形(图4)。
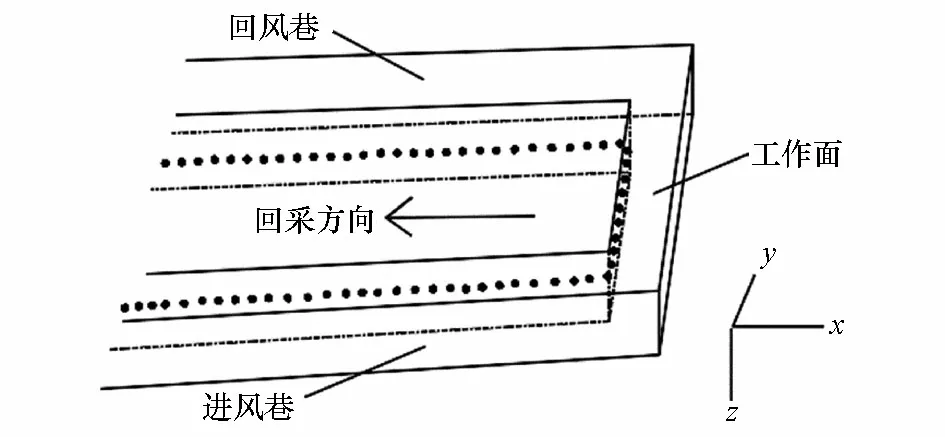
图3 工作面电极布置示意Fig.3 Electrode layout of working face
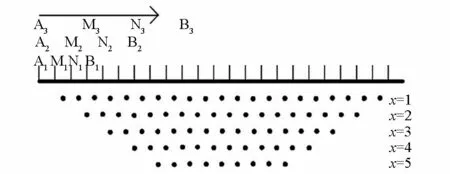
图4 温纳装置跑极Fig.4 Schematic diagram of AMNB array
2.1.2 回采方向异常体数值模拟
对工作面回采方向内部的低阻异常体进行数值模拟,正演模型见图5,背景为3层层状模型,规格为210 m×110 m×100 m;顶层和底层的层厚度为110 m,电阻率均为400 Ω·m;中间层的层厚为20 m,电阻率为200 Ω·m,在中间层内部有一20 m×20 m×10 m的低阻异常体,其电阻率为1 Ω·m。在中间层的前、右、后三个面上布设了3条测线,组合形成U形测线,其中前后两条测线有42个电极,间距为5 m;位于右侧面的测线有21个电极,间距同样为5 m。建立好模型框架后将模型划分为若干个网格单元(图6),网格单元均为四面体,网格在异常体内部及电极附近划分密集。
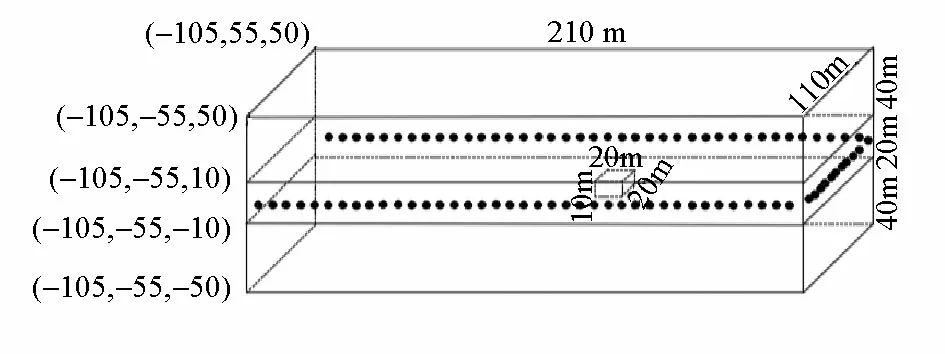
图5 工作面探测模型Fig.5 Working face detection model
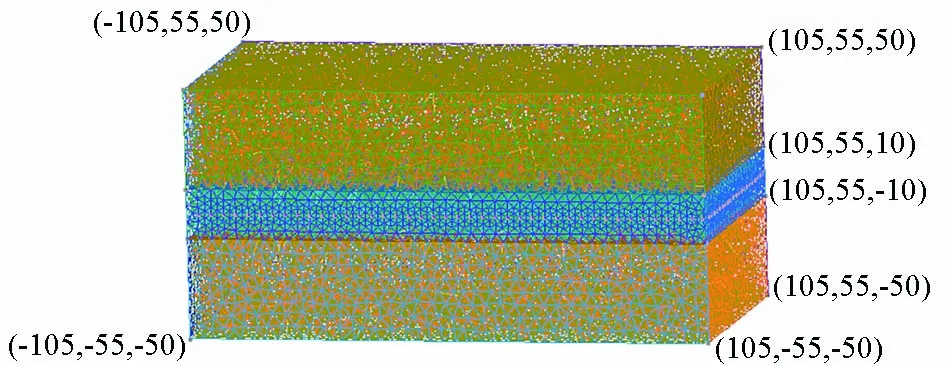
图6 工作面模型网格剖分示意Fig.6 Working face model mesh generation diagram
正演时,数据相对误差为0.01,采用663种观测方式得到电位差数据,数据精度为10-4,将其作为反演的初始数据,反演模型大小与正演模型一致,初始电阻率为均匀的200 Ω·m。反演时,设置正则化因子为0.01,迭代次数为3,数据精度为10-5,最终的误差率为3.78%,得到了图7~图10的反演结果,其中图7~图9为x、y、z这3个方向的电阻率模型切片图,图上红色矩形框为正演模型中异常体的位置,3张图均有低阻异常特征,但低阻区域与实际异常体位置有略微误差。
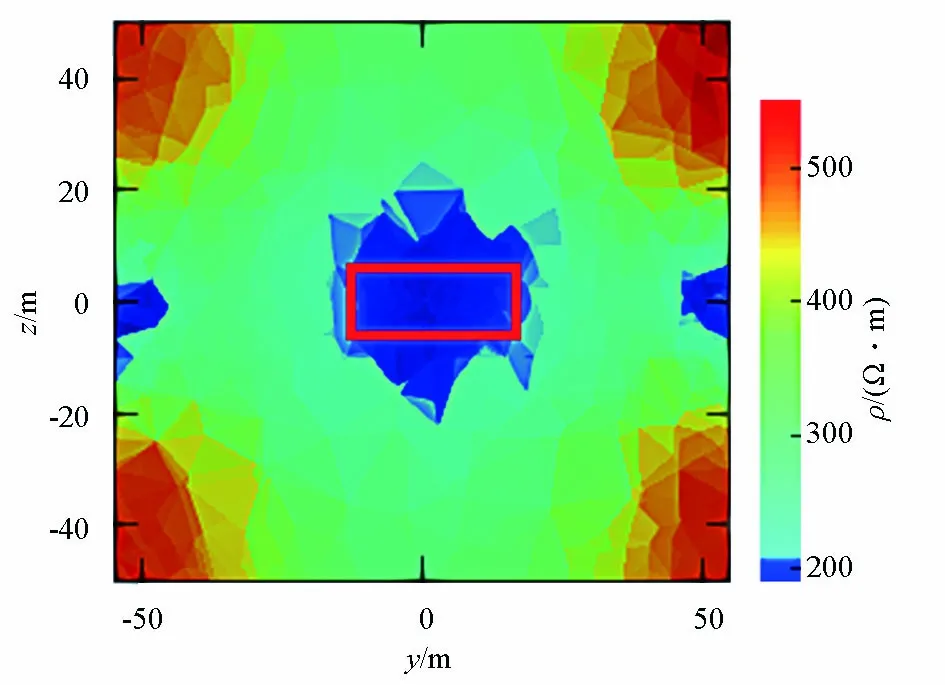
图7 工作面探测反演结果x方向切片Fig.7 x-direction slice map of detection inversion result of working face
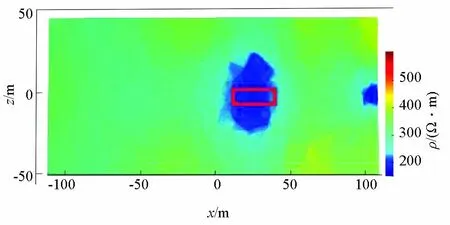
图8 工作面探测反演结果y方向切片Fig.8 y-direction slice map of detection inversion result of working face
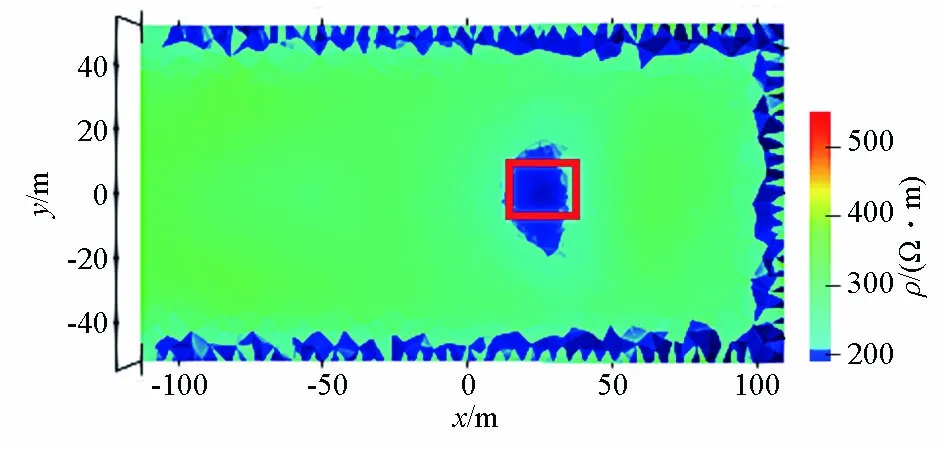
图9 工作面探测反演结果z方向切片Fig.9 z-direction slice map of detection inversion result of working face
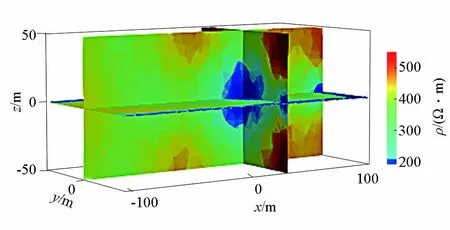
图10 工作面探测三维电阻率反演Fig.10 Three dimensional resistivity inversion map of working face detection
图10为3个切片的组合而成的三维电阻率反演图,可以直观地看出模型内反映出一低阻异常。
2.2 巷道超前探测正、反演
2.2.1 巷道迎头超前探测工作方法
通常在巷道空间内使用直流电法探测迎头前方异常体时,在巷道地面布设一条测线直到巷道迎头,测线上有若干个电极,在靠近迎头处的电极供电,在后方的电极依次测量,如图11所示。
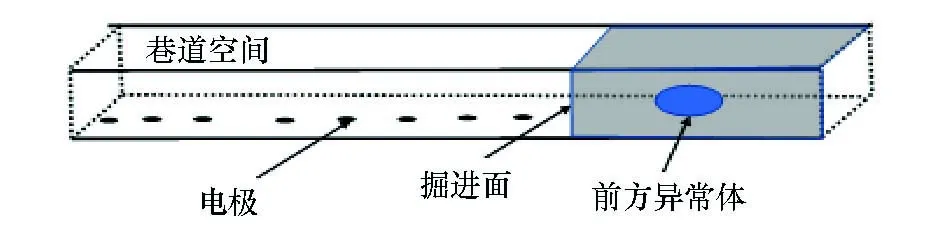
图11 巷道空间超前探测传统布极方式Fig.11 Traditional pole arrangement method of roadway space advanced detection
区别于传统的布极方式,而是在狭窄的巷道空间内,布设3条平行测线,间距1 m,每条测线上有若干个电极,电极间距为5 m,见图12。此种布极方式采用的观测方式也不是传统的三极装置,而是图13所示的观测方式:分别从两条不同测线中各选取两个电极作为供电电极A、B和测量电极M、N,这样3条测线就有3种观测装置,如使用图中装置①时,从测线的一端观测至另一端,之后再换成装置③向另一端平行观测,最后换成装置②,即测线1和测线3分别作为供电和测量,向迎头方向推进观测。
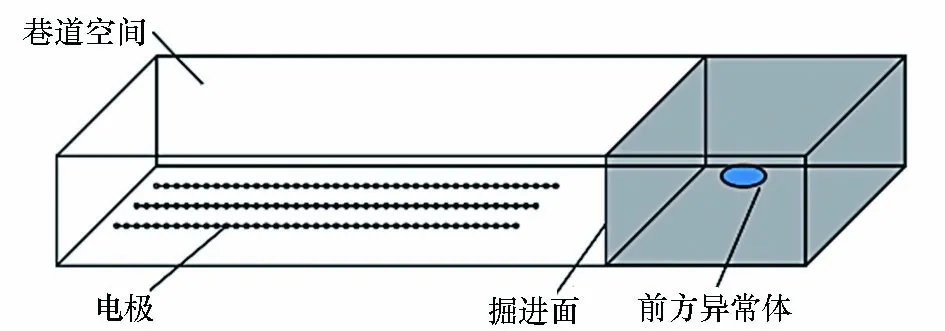
图12 巷道空间超前探测三测线示意Fig.12 Schematic diagram of three survey lines for advanced detection of roadway space
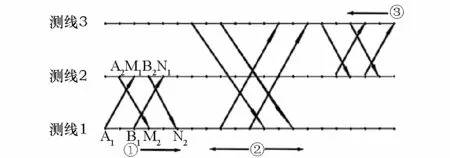
图13 三测线超前探测跑极Fig.13 Three line advanced detection pole running diagram
2.2.2 巷道前方异常体数值模拟
对一巷道空间前方的低阻体进行了超前探测数值模拟,该正演模型如图14所示,整个背景模型规格200 m×50 m×100 m的空间,其电阻率为300 Ω·m;巷道空间长100 m,宽、高均为5 m,电阻率为10 000 Ω·m;异常体位于巷道前方20 m处,长、宽均为10 m,高5 m,电阻率为1 Ω·m。
网格化后的单元模型见图15。正演时,使用3条平行测线中的其中2条进行供电与测量,数据的相对误差为0.01,得到电位差,数据精度为10-4,将其作为反演的初始数据。
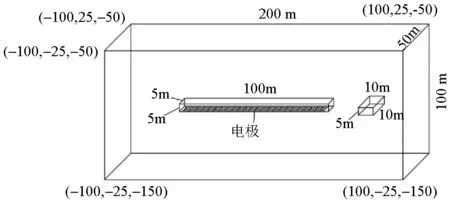
图14 巷道超前探测正演模型Fig.14 Forward modeling diagram of roadway advanced detection
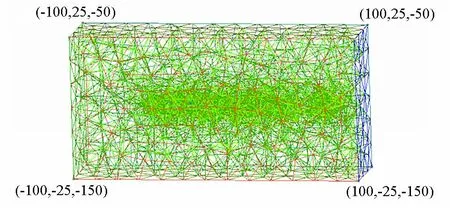
图15 巷道超前探测模型网格剖分示意Fig.15 Schematic diagram of mesh generation for advanced detection model of roadway
反演的模型框架与正演模型一致,但电阻率设置为均匀的300 Ω·m。反演时,正则化因子为 0.01,迭代次数为4,数据精度范围在10-5~10-4,最终的误差率为4.62%,得到图16~图19的反演结果。其中图16、图17为y、z方向的电阻率模型切片图,图上的红色矩形框为正演模型中异常体的位置,蓝色矩形框为巷道空间所在区域,可以直观地看出该区域较周围区域呈现出高阻特征,而高阻区域前方大约20 m出呈现出低阻响应,这和正演模型的异常体位置分布是一致的,而在图18的x方向上切片也呈现明显的低阻异常特征,并且低阻区域与实际异常体位置基本相符;图19为3个切片的组合而成的三维电阻率反演图,从该图上能更立体的看出反演结果呈现的全空间电阻率特征。
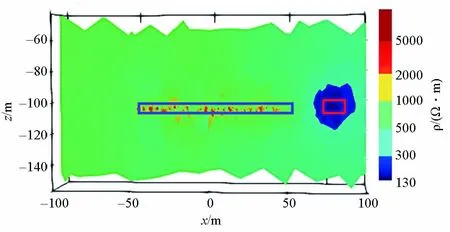
图16 巷道超前探测反演结果y方向切片Fig.16 y-direction slice of roadway advanced detection inversion results
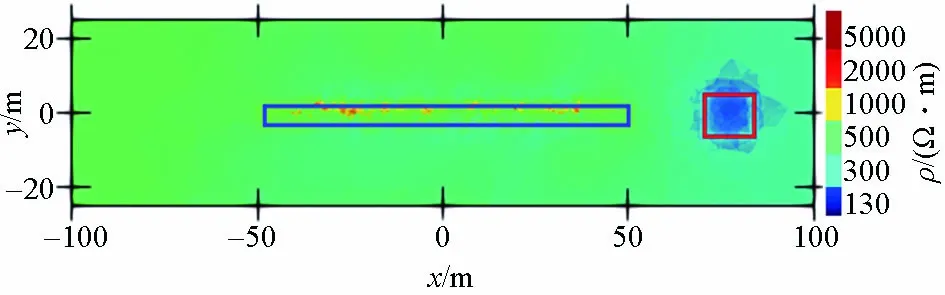
图17 巷道超前探测反演结果z方向切片Fig.17 z-direction slice of roadway advanced detection inversion results
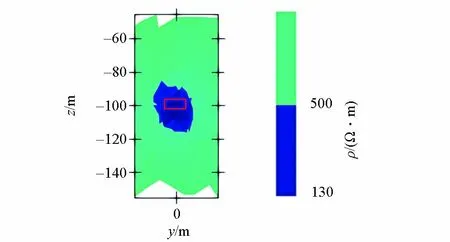
图18 巷道超前探测反演结果x方向切片Fig.18 x-direction slice of roadway advanced detection inversion results

图19 巷道超前探测三维电阻率反演Fig.19 Three dimensional resistivity inversion map of advance detection of roadway
3 结论
针对工作面内回采方向的异常体、巷道空间前方异常体分别采用不同工作方法的矿井直流电阻率法进行了全空间的正、反演数值模拟,根据二者呈现的反演结果可以得出以下结论:
1) 对于工作面内回采方向含水构造等低阻异常的探查,可沿着工作面的3个侧面布置U形的电极,而后采用高密度电法或者网络并行电法中的观测方式进行数据采集。从3个分量的反演结果切片来看,该方法测得的数据经过反演能较好地反映出低阻异常特征,并且具有较好的分层能力。值得注意的是,此种布极方法由于电极位于模型边界面,反演结果中电极附近同样会呈现出低阻,因此在实际工作中需要加以注意。
2) 对于巷道空间内探测迎头前方异常体,可以垂直巷道底板布设3条平行的电极,测线之间间距不宜过大,而电极距不宜过小;观测时,在一条测线上选取两个电极作为供电电极,在另一条测线的斜对面选取两个电极作为测量电极,并且尽量充分使用3条测线上的电极。经过此种方法测得的数据反演后能清晰反映出巷道的高阻特征和异常体的低阻特征,并且特征的区域大小、坐标位置与实际模型基本一致。
3) 经过所做的数值模拟工作,对于矿井直流电阻率法的实际应用有一定的指导作用,特别是回采工作面内复杂地质问题的探查,所使用的直流电阻率工作方法有不错效果。但做的工作并不全面,所构建的模型比较简单,没有充分考虑井下的复杂地质条件,因此今后在解决实际工程问题时要对此进行补充说明;除此之外,所研究分析的异常体均为板状异常体,今后也要进一步分析本文采用的两种工作方法对于球状体、柱状体或是其他类型的异常体的探测效果。
