基于分布式合成双射流的飞行器无舵面三轴姿态控制飞行试验1)
2022-06-16赵志杰罗振兵刘杰夫彭文强李石清
赵志杰 罗振兵 刘杰夫 邓 雄 彭文强 李石清
(国防科技大学空天科学学院,长沙 410073)
引言
机械舵面会破坏飞行器良好的隐身性能,增加控制单元重量,且存在饱和、死区等非线性特性,不利于控制系统设计.主动流动控制(active flow control,AFC)技术可以在无机械舵面偏转的情况下,仅通过在流场敏感点处注入动量,改变全局流场特征,重构飞行器表面压力分布,产生飞行控制所需的姿态控制力及力矩,实现飞行姿态操控.AFC 具有控制效率高、控制力可调、易于实现一体化设计等优点,且具备完全取代飞行器机械活动舵面,大幅提升隐身性能的潜力,目前已广泛应用于飞行控制领域,包括环量控制[1-6]、推力矢量控制[7-10]、分离流控制[11-15]等,极具应用价值.
主动流动控制技术目前已在飞行器中得到了广泛验证.英国曼彻斯特大学Crowther 团队[5]于2005 年设计了Tutor 飞行器,利用电动空气压缩机驱动的射流环量控制激励器取代副翼,实现了滚转姿态操控;2010 年,该团队联合BAE 公司研发并试飞了DEMON 飞行器[16],利用辅助动力单元驱动的射流环量控制装置取代升降舵及副翼,并通过发动机引气同向流推力矢量控制技术拓宽俯仰力矩的操纵范围,实现了滚转及俯仰姿态操控;2019 年,该团队设计并试飞了MAGMA 飞行器[17],利用发动机引气驱动的射流环量控制技术及法向流推力矢量控制技术实现了飞行器滚转及俯仰姿态的操控.南京航空航天大学史志伟教授团队以离心风机作为环量控制装置的驱动单元,于2014 年试飞了依靠射流环量控制技术进行滚转操控的常规布局飞行器[18],2015 年该团队试飞了依靠射流环量控制进行俯仰和滚转控制的完全无舵面鸭式布局飞行器[19],2019 年该团队试飞了依靠射流环量控制及反向射流控制进行三轴姿态控制的全无舵面飞翼布局飞行器[20].
现有的射流发生装置需要通过发动机引气、背负气源、轴流风扇等方式来产生足够强度的射流,但此类装置能耗较高,且需要复杂的管路设计,增加了系统的体积与重量,提高了系统整合的复杂度;同时,发动机引气会削弱发动机净推力与负载能力,且存在管路泄露、停车失控的风险.因此,研发一种具有质量轻、结构紧凑、能耗低、易于实现一体化设计、方便调控特点的新型流动控制单元,具有极高的应用潜力.
零质量合成射流激励器[21-23]具有无需气源管路、一体化能力强、质量轻、结构紧凑、响应快、控制力可调、能耗低的优点,在飞行控制领域具有极大的应用潜力[24-25],但合成射流能量水平偏低,控制能力稍显不足,且容易出现压载失效等问题,限制了其工程应用.罗振兵团队设计的合成双射流激励器(dual synthetic jet actuator,DSJA)[26]是一种单膜双腔结构,如图1 所示,除具备合成射流激励器的优点外,还解决了合成射流激励器能量利用率低、易压载失效的问题,同时提升了其流场控制能力.目前,合成双射流(dual synthetic jet,DSJ)环量控制技术已成功应用于无人机中,并通过飞行试验验证了其滚转控制能力[27].
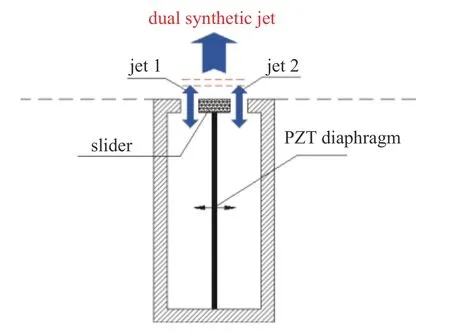
图1 合成双射流激励器结构示意图Fig.1 The structure diagram of DSJA
本研究以前述飞行试验为基础,设计了分布式三轴姿态控制合成双射流激励器,并将其集成于常规布局飞行器中,通过飞行试验,验证了分布式合成双射流对飞行器三轴姿态的控制能力.
1 分布式三轴姿态控制合成双射流激励器
滚转环量控制激励器采用双膜三腔结构[28],两片压电振子将腔体分为三个小腔体,其整体结构如图2 所示,中间腔体由两个膜片共同压缩膨胀,上、下两腔体分别由上、下两膜片分别压缩膨胀,两膜片的驱动方向相反.该激励器尺寸较小,长、宽、高分别只有65 mm,69 mm,20 mm,压电振子直径为50 mm,单个重量为41 g,极易实现一体化设计.Coanda 半径r为9 mm,射流出口缝高h为1 mm,中间及两侧射流出口缝宽分别为25 mm,13 mm,相关无量纲尺寸参数为r/c=0.039 1,h/c=0.004 34.飞行试验时,设置正弦波驱动频率为激励器共振频率——800 Hz (F+=6.13),以保证射流具有较高速度,驱动电压为 ±170 V,单个膜片的驱动功率为4.7 W.矩形出口合成射流速度分布具有一定的展向均匀性[29],故仅通过热线风速仪测量了每个出口中心处的速度,距离出口1、出口2、出口3 处1 mm的射流峰值速度分别为48.59 m/s,39.21 m/s,37.58 m/s,速度获取方法为取150 个驱动周期峰值速度的平均值.

图2 滚转环量控制激励器结构示意图Fig.2 Structure diagram of the roll CC actuator
偏航反向DSJ 控制激励器采用单膜双腔结构,其整体结构如图3 所示.该激励器长、宽、高分别只有60 mm,63 mm,17.5 mm,压电振子直径为50 mm,单个重量为38 g.射流出口长度l、宽度d分别为50 mm,2 mm,两射流出口间距为16 mm,射流出射角度为150°,相关无量纲参数为d/c=0.0087.飞行试验时,设置正弦波驱动频率为激励器共振频率——510 Hz (F+=3.91),驱动电压为±170 V,单个膜片的驱动功率为3.7 W,距离出口1、出口2 中心处1 mm 的射流峰值速度分别为36.44 m/s,34.07 m/s.

图3 偏航反向DSJ 控制激励器结构示意图Fig.3 Structure diagram of the yaw reverse DSJ actuator
俯仰环量控制激励器采用双膜双腔结构,中间腔体和侧腔体由上、下两膜片共同压缩膨胀,两膜片的驱动方向相反,其整体结构如图4 所示.该激励器长、宽、高分别为59.5 mm,75.5 mm,20 mm,压电振子直径为50 mm,单个重量为47 g.两个射流出口长l′、宽h′均为51.5 mm,1 mm,Coanda 半径r′为9 mm,相关无量纲尺寸参数为r′/c′=0.055 2,h′/c′=0.006 13,其中c′为平尾弦长.飞行试验时,设置正弦波驱动频率为激励器共振频率(530 Hz),驱动电压为 ±170 V,单个膜片的驱动功率为4.3 W,距离出口1、出口2 中心处1 mm 的射流峰值速度分别为31.65 m/s,28.98 m/s.

图4 俯仰环量控制激励器结构示意图Fig.4 Structure diagram of the pitch CC actuator
2 试验平台与方法
2.1 无人试飞平台及控制策略
选取一架具有上单翼、倒V 尾的常规布局飞行器作为试飞平台,其中V 尾下,设置一段平尾,如图5(a)所示,飞行平台的具体参数如表1 所示,合成双射流激励器分布式布局方案如图5(b)所示.

表1 无人飞行平台具体尺寸Table 1 Detailed size of UAV platform
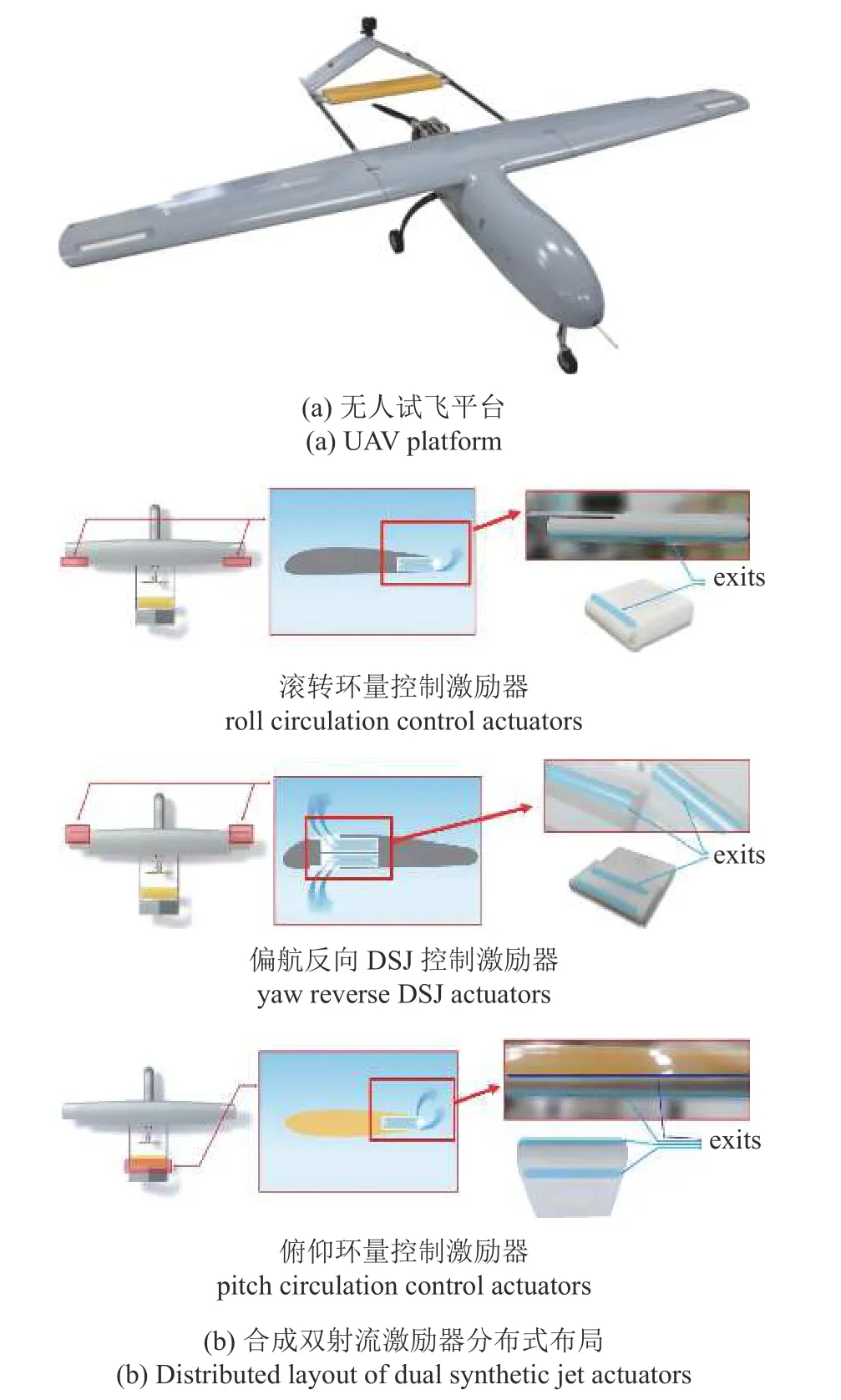
图5 无人试飞平台Fig.5 Unmanned flight test platform
在激励器分布式布局中,滚转环量控制激励器分布式布置于两侧机翼翼尖后缘处,射流出口靠近压力面,通过减小控制侧机翼环量,减小升力、增大阻力,该控制方式已在文献[1]中进行了数值验证,以下将此种控制方式称为负环量控制,并通过其实现滚转姿态控制.在单侧机翼中,滚转环量控制激励器沿展向布置4 个,总长度为260 mm.
偏航反向DSJ 控制激励器布置于两侧机翼靠近翼尖20%的弦长处,分别沿吸力面、压力面展向均匀布置,通过反向DSJ,增加控制侧机翼阻力,实现偏航姿态控制,该控制方案已在文献[30]中进行了数值验证.在单侧机翼中,偏航反向DSJ 控制激励器上、下沿展向均匀布置3 个,总长度为180 mm.
俯仰环量控制激励器分布式布置于V 尾下的平尾后缘,环量控制射流出口靠近压力面,通过出口1 和2 的综合作用,减小平尾环量,降低平尾升力,实现抬头控制,该控制方案已在文献[31]中进行了数值验证.该激励器沿平尾展向均匀布置8 个,总长度为476 mm.值得注意的是,该激励器与滚转环量控制激励器效果一致,但其产生的升、阻力变化量更大[31],若用于滚转控制,会增强横、航向耦合,不利于控制系统设计,而俯仰控制所需的气动力变化量相对较大,故此处仅在俯仰通道应用该激励器.需要说明的是,该激励器由于其布局形式只能起到减小平尾升力的作用,无法实现升力增加,所以只能进行抬头控制.
2.2 飞行航线及试验方法
试飞的飞行航线如图6 所示:在A点,飞行器由右转弯状态改出,借助机械舵面在到达B点前进入平飞状态;到达B点后,飞行器近似保持稳定平飞,机械舵面停止操控;到达C点时,姿态控制激励器开始工作,控制飞行器姿态;在D点,机械舵面介入控制,操控飞行器恢复正常航线飞行,之后飞行器在舵面和激励器的共同作用下进入右转弯,在E点,关闭激励器,借助机械舵面保持飞行器右转弯状态.本研究着重分析在C点开启激励器后,无舵面操纵情况下的动态响应.

图6 飞行航线Fig.6 Flight route
3 试验结果与分析
在飞行速度为30 m/s 的巡航工况下,测试了分布式三轴姿态控制合成双射流激励器对滚转、偏航、俯仰的控制能力,以下分别对这三个通道的试飞工况进行分析.
3.1 滚转操控
开启左侧滚转控制激励器负环量控制前、后的飞行状态机上视角对比如图7 所示.可以发现,在施加控制后,飞行器实现了向左滚转,这是因为,在左侧负环量控制作用下,飞行器左侧机翼升力减小,会受到向左的滚转力矩,故会向左滚转.控制过程中的飞行姿态参数变化如图8 所示.通过区间C-D观察激励器的控制效果,在C点作动器开始控制飞行器,在D点机械舵面介入控制,可以发现,左侧负环量控制激励器的开启产生了向左的滚转角速度,并不断增大,最大滚转角速度可达16.87°/s,飞行器向左发生滚转,且滚转角不断增大;滚转角速度的变化几乎没有延迟,滚转角的变化存在约0.15 s 的延迟.

图7 左侧滚转CC 激励器控制前、后的飞行状态对比Fig.7 Comparison of flight status before and after left-side CC

图8 左侧滚转CC 激励器控制下的飞行姿态参数变化Fig.8 Flight attitude parameter changing process under control of left-side CC
开启右侧滚转控制激励器负环量控制前、后的飞行状态对比如图9 所示,可发现,在施加控制后,飞行器实现了向右滚转,这是因为,在右侧负环量控制作用下,飞行器右侧机翼升力减小,飞行器会受到向右的滚转力矩,故会向右滚转.控制过程中的飞行姿态参数变化如图10 所示,可发现,右侧负环量控制激励器的开启产生了向右的滚转角速度,并不断增大,最大滚转角速度达10.03°/s,飞行器向右发生滚转,且滚转角不断增大;滚转角速度的变化几乎没有延迟,滚转角的变化存在约0.21 s 的延迟.能实现的最大右滚转角速度要小于最大左滚转角速度,这可能是由于空中侧风所致.

图9 右侧滚转CC 激励器控制前、后的飞行状态对比Fig.9 Comparison of flight status before and after right-side CC
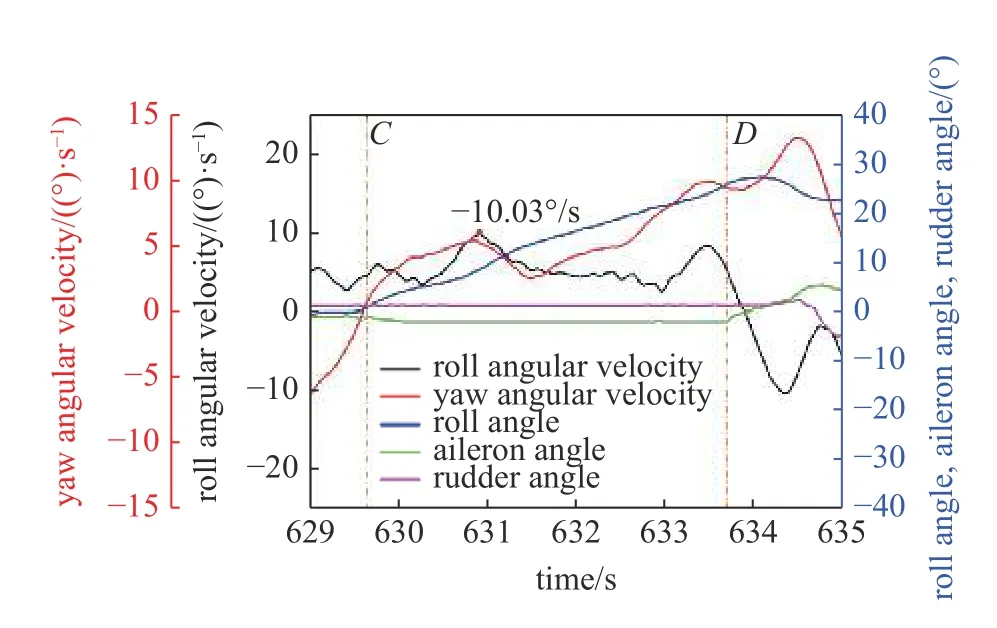
图10 右侧滚转CC 激励器控制下的飞行姿态参数变化Fig.10 Flight attitude parameter changing process under control of right-side CC
3.2 偏航操控
开启左侧反向DSJ 激励器控制前、后的飞行状态机上视角对比如图11 所示,可以发现,在施加控制后,飞行器实现了向左偏航,并带有左滚转.这是因为,在左侧反向DSJ 控制下,飞行器左侧机翼阻力增大,受到向左的偏航力矩,故会产生右侧滑,右侧滑导致了左滚转.控制过程中的飞行姿态参数变化如图12 所示,可发现,左侧反向DSJ 控制激励器的开启产生了向左的偏航角速度,并不断增大,最大偏航角速度可达8.12°/s,同时在该构型下,右侧滑也会产生向左的滚转角速度,促使飞行器向左发生滚转,且滚转角不断增大;滚转、偏航角速度的变化几乎没有延迟,滚转角的变化存在约0.81 s 的延迟.

图11 左侧反向DSJ 激励器控制前、后的飞行状态对比Fig.11 Comparison of flight status before and after left-side reverse DSJ

图12 左侧反向DSJ 激励器控制下的飞行姿态参数变化Fig.12 Flight attitude parameter changing process under control of left-side reverse DSJ
开启右侧反向DSJ 激励器控制前、后的飞行状态对比如图13 所示,可发现,在施加控制后,飞行器实现了向右偏航,并带有右滚转.这是因为,在右侧反向DSJ 控制下,飞行器右侧机翼阻力增大,受到向右的偏航力矩,故会产生左侧滑,左侧滑导致了右滚转.控制过程中的飞行姿态参数变化如图14 所示,可发现,右侧反向DSJ 控制激励器的开启产生了向右的偏航角速度,并不断增大,最大偏航角速度可达9.09°/s,同时在该构型下,左侧滑也会产生向右的滚转角速度,促使飞行器向右发生滚转,且滚转角不断增大;滚转、偏航角速度的变化几乎没有延迟,滚转角的变化存在约0.68 s 的延迟.

图13 右侧反向DSJ 激励器控制前、后的飞行状态对比Fig.13 Comparison of flight status before and after right-side reverse DSJ

图14 右侧反向DSJ 激励器控制下的飞行姿态参数变化Fig.14 Flight attitude parameter changing process under control of right-side reverse DSJ
3.3 俯仰控制
开启布置在V 尾下方平尾的俯仰环量控制激励器控制前、后的飞行状态机上视角对比如图15 所示,可发现,在施加控制后,飞行器有明显抬头,俯仰角增大.这是因为,在激励器控制作用下,飞行器尾部平尾升力减小,受到抬头力矩作用,且力臂较长,故飞行器抬头趋势明显.控制过程中的飞行姿态参数变化如图16 所示,可发现,激励器的开启产生了抬头角速度,并呈现出波动增大的趋势,该波动可能是由合成双射流控制力矩、自身飞行稳定力矩以及空中侧风综合作用所致,最大抬头角速度可达7.68°/s,且俯仰角不断增大;俯仰角速度的变化几乎没有延迟,俯仰角的变化存在约0.45 s 的延迟.

图15 俯仰CC 激励器控制前、后的飞行状态对比Fig.15 Comparison of flight status before and after the pitch CC

图16 俯仰CC 激励器控制下的飞行姿态参数变化Fig.16 Flight attitude parameter changing process under control of pitch CC
通过观察上述飞行参数的变化,可发现在利用分布式合成双射流技术进行三轴姿态控制时,三轴姿态角速度都会产生一定的波动:一方面这是由于DSJ 操控时间过短,飞行器姿态参数变化还没稳定,故波动较大;另一方面,这可能也与分布式合成双射流操控力矩与飞行器自身稳定力矩及空中侧风的综合作用有关.未来研究中,会将分布式三轴姿态控制合成双射流激励器耦合进飞行控制系统中,来提高其控制稳定性.
4 结论与展望
本研究对零质量合成双射流激励器结构进行优化,设计了分布式三轴姿态控制合成双射流激励器,并将其集成于常规布局飞行器中,通过飞行试验,验证了自主可控的分布式合成双射流技术对飞行器三轴姿态的控制能力,结果表明:
(1) 自主可控的分布式合成双射流技术可以通过主动流动控制,实现对飞行器巡航时的无舵面三轴姿态操控;
(2) 分布式三轴姿态控制合成双射流激励器可实现的最大滚转角速度、偏航角速度及俯仰角速度分别为16.87°/s,9.09°/s,7.68°/s.
与背负气源、引气等方案相比,当前试飞的分布式合成双射流技术控制能力稍显不足,这一方面是由于激励器结构设计不恰当,致使腔体流阻较大,射流速度偏低;一方面是受激励器电源适配器限制,无法发挥分布式合成双射流的最佳控制效果.故下一步研究中,将通过改进分布式三轴姿态控制合成双射流激励器结构及优化电源适配器两方面来提升分布式合成双射流的流场控制能力.