单臂带电作业机器人工具头的设计
2022-06-15应永灵沈科炬高东寅
应永灵 沈科炬 高东寅
慈溪市输变电工程有限公司 浙江 慈溪 315300
引言
带电作业机器人作为智能电网建设的新兴技术,已经是配电网带电作业领域重点研究的课题。目前国内外带电作业机器人大多采用两个机械臂来模拟人类双手的动作[1],实现引流线的搭接,但双臂需要协调控制,对控制的精度要求高,从而造成产品生产成本高,成为广泛使用的阻碍。带电作业机器人采用单臂结构,可以有效降低控制难度和产品成本,促进带电作业机器人的推广应用,因此,本文研制了适用于单臂带电作业机器人的工具头,集引流线抓取、引流器紧固功能于一体,具有抓取范围大、绝缘性好等特点。
1 工具头结构设计
单臂带电作业机器人主要由工具头、机械臂、平移装置、剪线装置、动力及控制系统、传感系统、机架等组成,其结构如图1所示,具有抓引流线、送引流线、剪引流线、紧固引流器等功能。

图1 单臂带电作业机器人
工具头安装在机械臂的末端,主要实现三个功能:第一,在搭接前引流器安装在工具头上;第二,抓取引流线;第三,搭接后把主线和引流线与引流器相固定,从而对应设计三个功能装置,即卡紧装置、抓手装置和拧紧装置,卡紧装置的作用是在进行搭接前安装和卡紧引流器,使其固定在工具头上,抓手装置的作用是抓取引流线和在搭接过程中使引流线随着工具头一起移动,拧紧装置的作用是驱动引流器上的穿刺头螺杆和夹头螺杆旋转使穿刺头穿入主线以及使夹头夹住引流线,使引流线和主线牢靠的固定在引流器上的夹紧卡口和穿刺卡口内。
工具头主要包括卡紧装置、抓手装置、拧紧装置、连接架体4个部分,如图2所示。

图2 工具头结构图
2 卡紧装置
卡紧装置的设计原则为在搭接过程中可靠地卡紧引流器,在搭接完成后能顺利的松开引流器,使引流器轻松脱离工具头。
卡紧装置如图3所示,包括卡紧气缸安装座、卡紧气缸和卡紧块,卡紧气缸安装在卡紧气缸安装座上,卡紧气缸可以推动卡紧块动作使引流器卡紧在工具头上,卡紧气缸所需的动力系统采用气动系统,由于空气的导电性差,因此选用空气作为动力传递介质可实现在动力传递路径上的有效绝缘。
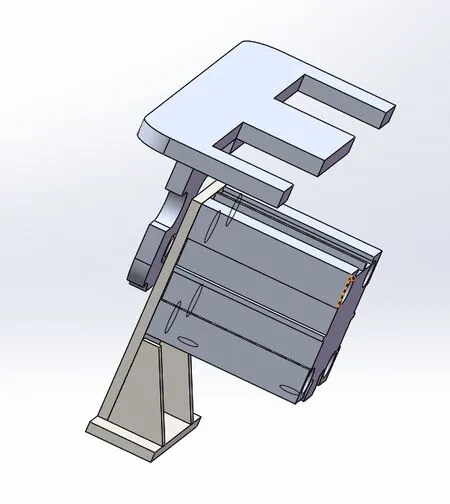
图3 卡紧装置结构图
3 抓手装置
抓手装置的设计原则为尽可能地方便抓取引流线,扩大抓取范围,降低对机械臂的移动精度和控制要求,同时,在搭接移动引流线的过程中应尽量避免扭曲、弯曲引流线导致的损伤,尽量使引流线处于悬吊状态,因而在到达主线搭接位置前不能将引流线固定在工具头上,而是要在一定范围内可以自由移动但又不能从工具头脱落。
基于以上设计原则,抓手装置设计成主抓手和辅助抓手相配合的方式,辅助抓手的作用为在距引流线一个较大范围内抓取引流线,将引流线限制在工具头所构建的沿引流线断面的封闭空间内,引流线能够在封闭空间内沿引流线的长度方向自由移动,但是断面方向上引流线始终在封闭空间内,从而使引流线在搭接过程中不会从工具头上脱落,随着工具头移动的同时但是又有一定的自由度,使引流线处于悬吊状态,避免扭曲、弯曲所带来的对引流线的伤害,主抓手的作用是机器人将引流线送到主线搭接位置后,将在封闭空间内的引流线精准地送入引流器的夹紧卡口内,并夹住引流线,此时引流线固定在引流器的夹紧卡口内[2]。
抓手装置如图4所示,包括主抓手、辅助抓手、主抓手动作气缸、辅助抓手动作气缸、辅助抓手连杆,主抓手由两侧的抓手和铰耳连接座连接而成,抓手中部设有在支点位置的转轴安装孔,主抓手动作气缸的前端铰座与主抓手的铰耳连接座相铰接,可以推动主抓手绕着支点进行转动。辅助抓手、辅助抓手连杆、连接架体形成一个四杆机构,辅助抓手动作气缸可以推动辅助抓手绕着支点进行转动。
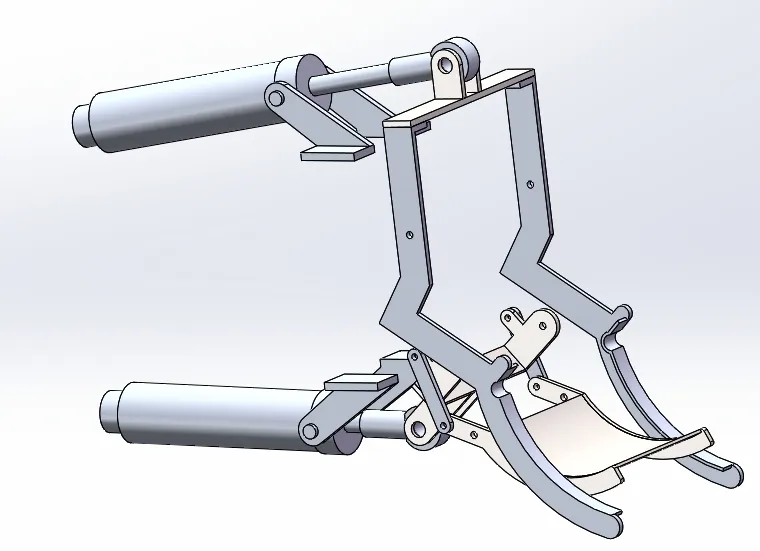
图4 抓手装置结构图
4 拧紧装置
为了施工方便快捷,缩短带电作业时间,带电作业机器人一次作业进行一相线的两个引流器的同时搭接,即在工具头一次安装两个引流器,将引流线同时并入两个引流器上,而每个引流线上有两个螺杆,分别用来固定引流线和主线,所以拧紧装置需要拧紧四个螺杆,为了降低工具头的重量,设计成一个电机驱动四个拧紧套筒同步旋转,从而带动螺杆同步旋转的方式,当电机驱动拧紧套筒旋转时,螺杆向内移动夹紧引流线和穿刺主线[3]。
拧紧装置包括拧紧电机、传动轴、齿轮传动装置、拧紧套筒,拧紧电机的动力经传动轴、主动齿轮、从动齿轮传递至拧紧套筒,引流器的力矩螺母套在拧紧套筒内,拧紧套筒旋转将引流器上的力矩螺母拧断,拧紧电机采用大传动比直流电机,其最大转矩可达80Nm,传动轴的材质采用玻璃纤维,玻璃纤维是一种机械强度高的绝缘材料,强度高、绝缘性能好,其击穿电压可大于35kV/mm,传动轴的长度为53mm,击穿电压理论上可达到1855kV,远大于带电作业线路的10kV,因此,既能满足传递动力所需的强度,又能有效地使电机与工具头接触带电线路的部分相绝缘,避免高压电击坏拧紧电机。
5 连接架体
连接架体包括前端的支撑架、中部的齿轮箱、后端的连接筒,支撑架上设有安装引流器的引流器安装座以及安装主抓手、辅助抓手的支座,为了减轻重量,其材料均为铝合金,齿轮箱采用铝合金材料加工而成,用于安装齿轮传动装置中的各级齿轮,连接筒连接齿轮箱和机械臂,将工具头的重量及所受的负载传递至机械臂上,其材质采用玻璃纤维,连接筒的长度为300mm,其击穿电压理论上可达到10500kV,远大于带电作业线路的10kV,可有效实现工具头与机械臂之间的绝缘。
6 工具头工作流程
单臂带电作业机器人工具头进行引流线搭接的工作流程包括以下步骤[4]:①安装引流器到工具头上,卡紧气缸驱动卡紧块卡紧引流器。②操作机械臂各运动关节使工具头移动并调整好姿态,使引流线进入辅助抓手可抓取的范围。③操作辅助抓手动作气缸动作,使辅助抓手绕支座铰点位置向支撑架内侧旋转,引流线在辅助抓手的拨动下进入由辅助抓手、引流器、支座所围成的封闭空间内,引流线只能在此空间内沿引流线的长度方向滑动。④当操作机械臂使引流器位于待搭接的主线位置,调整引流线剥线部分离抓手侧边的距离在规定的范围内,控制主抓手动作使引流线卡入引流器的弧形卡槽内并由主抓手卡紧。⑤操作机械臂使工具头上的引流器的穿刺卡口卡入主线,控制拧紧电机动作带动拧紧套筒旋转拧紧引流器的力矩螺母,在拧紧电机的驱动下,引流线会被夹头压紧,主线则被穿刺头刺进去,当穿刺头接触到主线内部的线缆时,此时引流线就和主线并到一起并通电了,继续拧紧使拧紧力矩达到力矩螺母所能承受的最大力矩时,力矩螺母破坏,从而达到了定力矩拧紧的要求。⑥所有的力矩螺母拧断后,卡紧气缸驱动卡紧块松开引流器,松开主抓手和辅助抓手,操作机械臂带动工具头往下移,引流器从工具头上脱开,从而引流器搭接工作完成。
7 结束语
本文设计的适用于单臂带电作业机器人的工具头,可以实现抓取引流线、卡紧引流线、定力矩拧紧引流器的功能,主抓手和辅助抓手相配合的设计方式,使其具有抓取范围大、送线过程引流线不会扭曲等特点,并且具有优良的绝缘性能,避免搭接引流线发生触电,单臂工具头的开发使带电作业机器人可以采用单臂结构就能实现双臂所具有的搭接引流线的功能,可以有效降低控制难度和产品成本,促进带电作业机器人的推广应用。
