基于模糊层次分析的地面找平机器人设计评价
2022-06-14吕燕楠周惠兴张中岳王舜郑晓昱
吕燕楠, 周惠兴,2*, 张中岳, 王舜, 郑晓昱
(1.北京建筑大学机电与车辆工程学院, 北京 100044; 2.北京市建筑安全监测工程技术研究中心, 北京 100044; 3.北京建筑大学土木与交通工程学院, 北京 100044)
随着现代工业的发展,中国的经济水平稳步增长,越来越多的房屋采用精品装修,地面多采用瓷砖铺贴的施工方式[1]。地面找平是瓷砖铺贴的前置工序,目前地面找平工序采用人工施工或者半自动施工,且施工人员的技能水平存在差异,地面找平存在地面空鼓、密实度不均匀、翘边歪斜、平整度不达标等质量问题,地面施工质量存在的问题将直接影响到瓷砖铺贴的质量,因施工质量而进行返工返修造成大量的资源浪费[2]。采用自动化施工可以有效提高地面找平施工质量,降低工人作业强度,提高地面找平和瓷砖铺贴整个施工的工程质量。
传感器技术以及机器人技术的快速发展为地面找平自动化施工提供了可能[3]。目前常见的地面找平施工主要采用操作人员驾驶设备进行无接触式施工来实施,因设备体积较大,仅适用于大型工业厂房、仓库、广场等大面积的地面找平施工[4]。当前适用于住宅室内较小面积的地面找平机器人的研究较少,然而小型找平施工面积占地面找平施工总面积的50%~60%。因此设计一种地面找平机器人实现小型地面自动化施工是目前地面找平施工的发展需求。该机器人的设计涉及机构设计、传感器技术、机器人学、人机工程学等学科,其理想设计方案的选择非常困难[5],采用科学有效的方法对机器人设计的关键因素进行评估,提出有效的设计模型非常必要。
层次分析法是一种可以有效解决多层面、多环节决策问题的分析工具,根据建立的多指标设计评价模型,进行指标间的两两比较,得出体现指标重要性的权重矩阵[6]。考虑到单一层次分析法本身的绝对性和主观性,引入模糊算法融入层次模型中,可以对产品设计方案进行更为科学的判断,使得设计的设备更加符合使用者和使用环境的需求[7]。
鉴于此,针对适用于住宅室内较小建筑面积的地面找平机器人的设计开发,现提出一种模糊层次分析方法对该设计方案进行决策选择研究。首先,结合地面找平机器人的原理和特点等多方面因素,构建了地面找平机器人设计及方案的评价准则;其次,建立并分析由相关专家的经验组成的专家库数据,得出不同准则间的权重;最后,将模糊数学融入层次模型来消除层次分析的主观性,并最终给出室内较小建筑面积的地面找平机器人的设计方案;以期完成样机的研制。
1 地面找平机器人评价准则
适用于较小建筑面积的地面找平机器人设计的评价标准是多层次的,为了保证地面找平机器人设计的科学性、合理性,需要依据最终的使用施工验收质量要求、使用便携性、后期维护性等方面来确定地面找平机器人的评价准则[8]。
1.1 评价准则分析
考虑到地面找平机器人在设计阶段的复杂性,结合智能建造的指导方向,考虑多个方面建立系统的评价体系。把评价准则分为4个方面:经济性、人机属性、环境兼容性和施工效率。
1.1.1 经济性
机械设备的设计研发除了解放人类的双手以外,同时也带来了更高的利润,一款不能带来经济优势的施工设备是没有意义的,所以应该把经济性作为首要指标去考虑。在施工设备中,除了固定的设备投入成本外,设备的维护成本、设备的使用成本(能源与物料投入)、操作人员的人工成本也是影响设备经济性的重要评价指标[9]。
1.1.2 人机属性
虽然建筑业正处在智慧建造高速发展的时期,但是建筑施工的一线工人文化素质普遍不高,在这种客观情况下,建筑机器人的人机属性尤为重要。得到使用者(一线工人)的认可和支持是产品研发目标的重要部分。综合使用者人机交互的需求要把设备操作性、设备维护难度、操作界面美观的属性作为评价设计方案的指标。
1.1.3 环境兼容性
考虑具体的地面找平施工,对于可以适应复杂施工作业环境且能达到预期施工质量的环境兼容性,是评价设备性能另一重要标准。对于地面找平而言,施工环境和过程较为复杂,例如,水泥砂浆在不同房间的沙与水混合比不尽相同,导致水泥砂浆的坍落度和凝结时间都会有区别[10]。同时对于毛坯房的施工,设备的能源续航能力也是评价环境兼容性的一项标准。所以适应施工地形、水泥砂浆材料不同凝固特性要求、满足能源与续航需求等也是找平机器人研发评价准则之一。
1.1.4 施工效率
地面找平机器人代替人工地面找平施工是研发找平设备的初衷,能否高效率的完成找平施工任务是判定设备研发成功与否的关键。施工总周期耗时、施工质量和单工艺施工耗时等因素是使设备高效率完成找平施工的子准则,每个指标都会影响找平机器人的效率。
1.2 设计方案
依据预期自动实现地面找平目标,结合市面上现有的一些找平设计方案,在实际设计之前,提出了以下4种初始方案,并最终确定一种最优设计方向,并以此进行详细设计、制造。
方案1:采用的是履带驱动的小车结构,履带小车上搭载可以水平摆动的四边形机构,其上搭载一个整平刮头,确保旋转整平刮头可以做水平往复运动。由于体型较小,地面找平机器人可在狭小的空间内完成地面找平作业,如图1所示。
方案2:采用的是目前主要运用在较大建筑面积上的激光找平机器人的缩小版,利用激光限位需要找平的地面高度,通过刮板的振动和水平运动来实现地面找平工作,如图2所示。
方案3:采用的是门式机构的地面找平机器人,机器人的两端是垂直于横梁行走的同步轮,横梁上有沿着横梁往复运动的行走机构,机构下方安装着可以旋转的找平滚子,通过同步轮和横梁上的行走机构可以把找平滚子扫过整个施工房间完成地面找平,如图3所示。
方案4:采用的是类似方案3中的门式结构,设备两端是垂直于横梁行走的同步轮,横梁下是一整条垂直于横梁滚动的滚子,通过同步轮的行走和滚子的滚动以及滚子振动来实现地面找平施工,如图4所示。
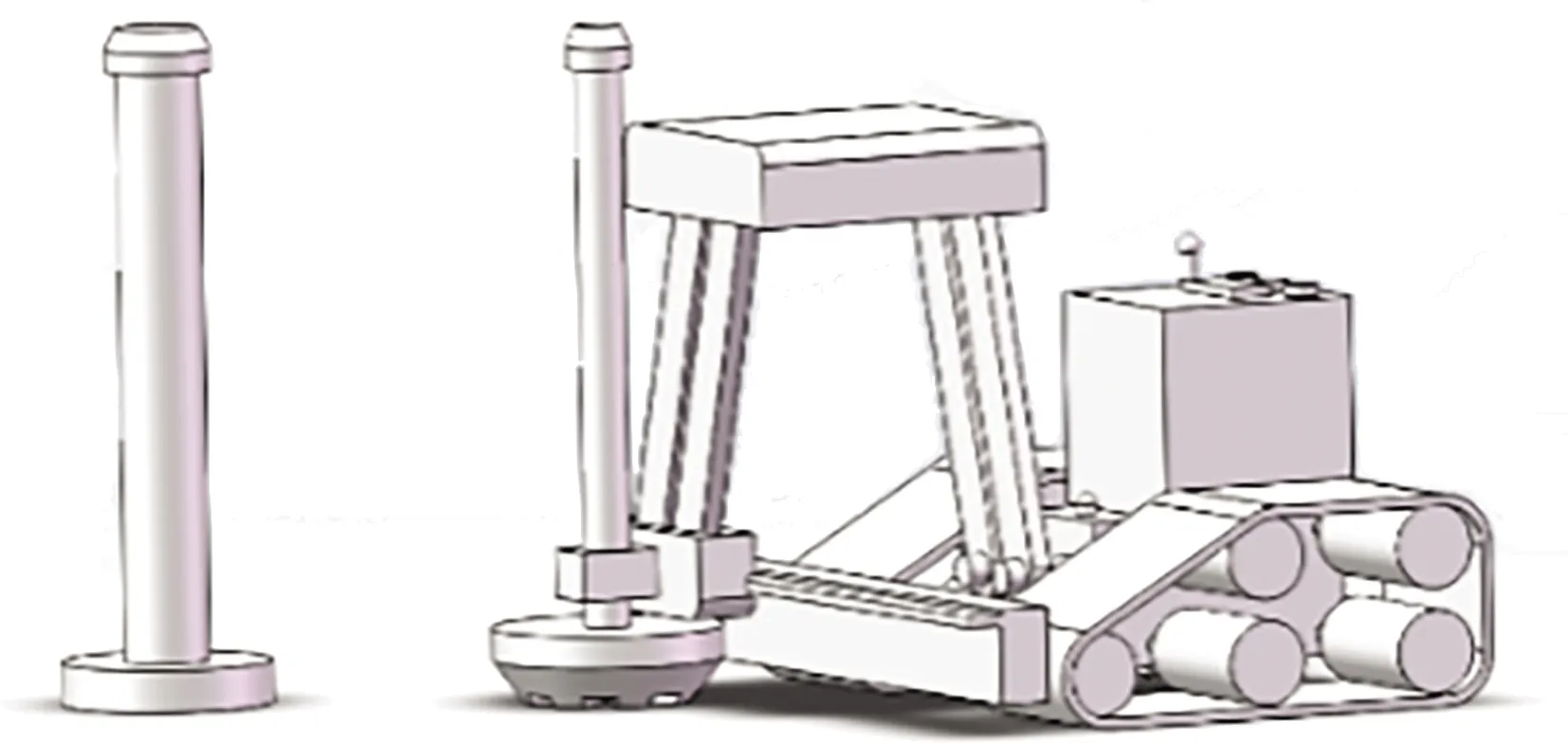
图1 履带驱动找平机器人Fig.1 Track driving screeding construction robot

图2 激光找平机器人Fig.2 Laser concrete screed robot
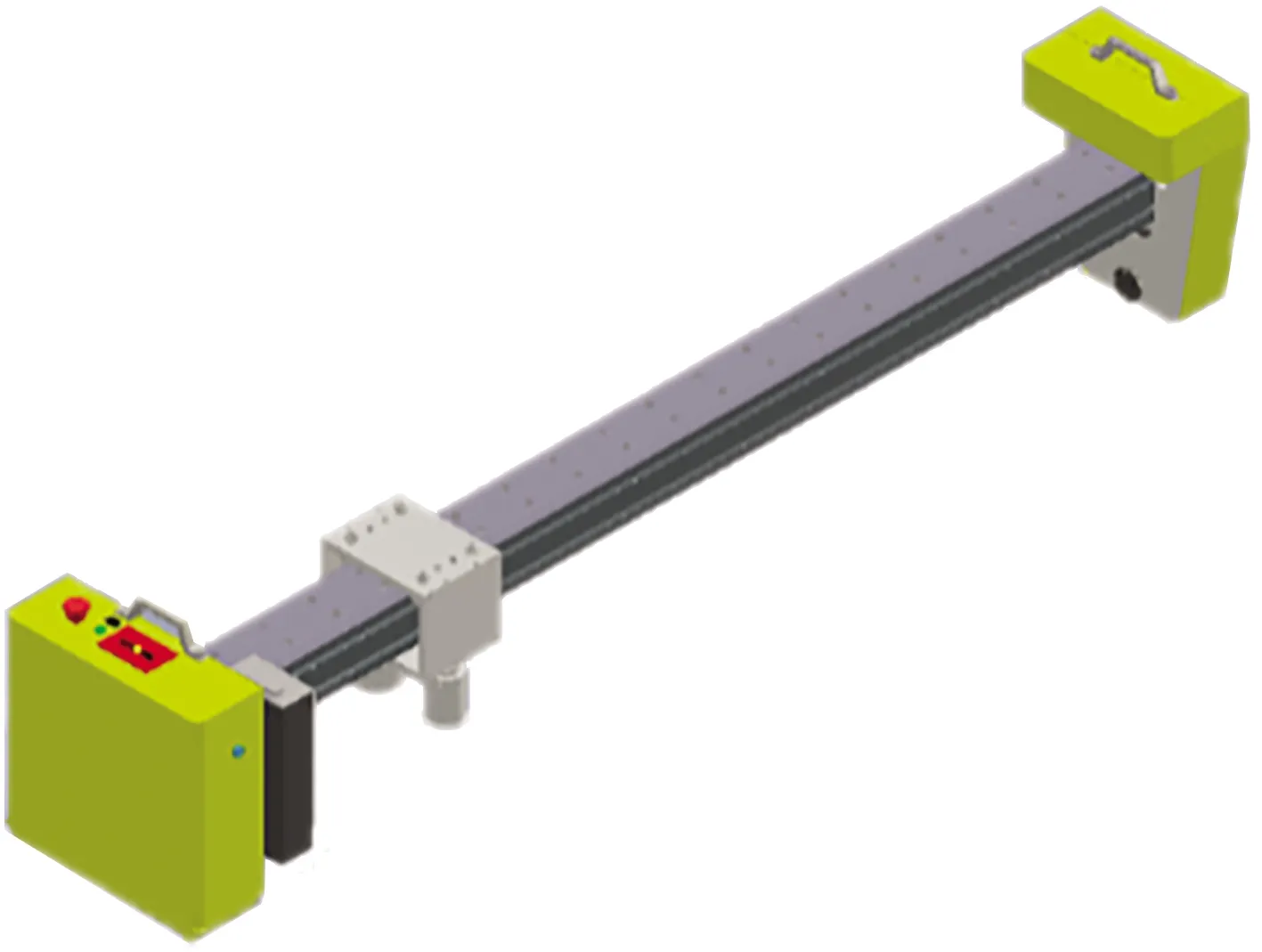
图3 门式机构找平机器人Fig.3 Gantry frame of concrete screed robot

图4 3 m滚筒式找平机器人Fig.4 3 m long cylindrical concrete leveling robot
1.3 层次结构模型图
结合上面的评价准则分析方法和提出的4个设计方案,确立准则层的准则,建立层次分析体系,最终绘制层次结构模型图(图5)。其中准则层包括主准则层与子准则层[11]。
2 层次分析评价模型
运用层次分析方法将地面找平机器人这个复杂的、多层面的问题细化为多个准则指标,并组成一个多层次的模型。并以此为依据解决机器人设计最优化的问题。
2.1 评价模型的问卷专家库数据来源
由于找平机器人设计方案的评价准则呈现出多层面、多领域的特性,要涉及的相关学科较多,所以在进行权重比较的问卷统计中,要构建一个包容度较高的专家问卷库。整个问卷调查的对象包括:机械结构工程师、建造工程师、工业设计工程师、机器人工程师以及一线的施工人员等资深人员。本文研究的数据均来源于正在参与建筑施工和室内装修的公司以及现阶段正在参与智能设备研发的工程师团队。
2.2 地面找平机器人层次评价模型权重计算
整个地面找平机器人设计综合评价的权重指标如表1所示,在层次分析法中,通过以下流程计算模型中的指标权重:首先通过专家调查数据,计算得出指标的判断矩阵;其次对矩阵进行一致性检验,以判断矩阵的逻辑性是否有误;最后求出通过一致性检验矩阵的特征向量,最后得到的权重向量需要经过归一化处理[12]。
首先依据专家问卷数据,采用两两准则间比较的方式以及层次分析法中常用的1~9标度法的方式来构建矩阵,判断矩阵的定义为

(1)
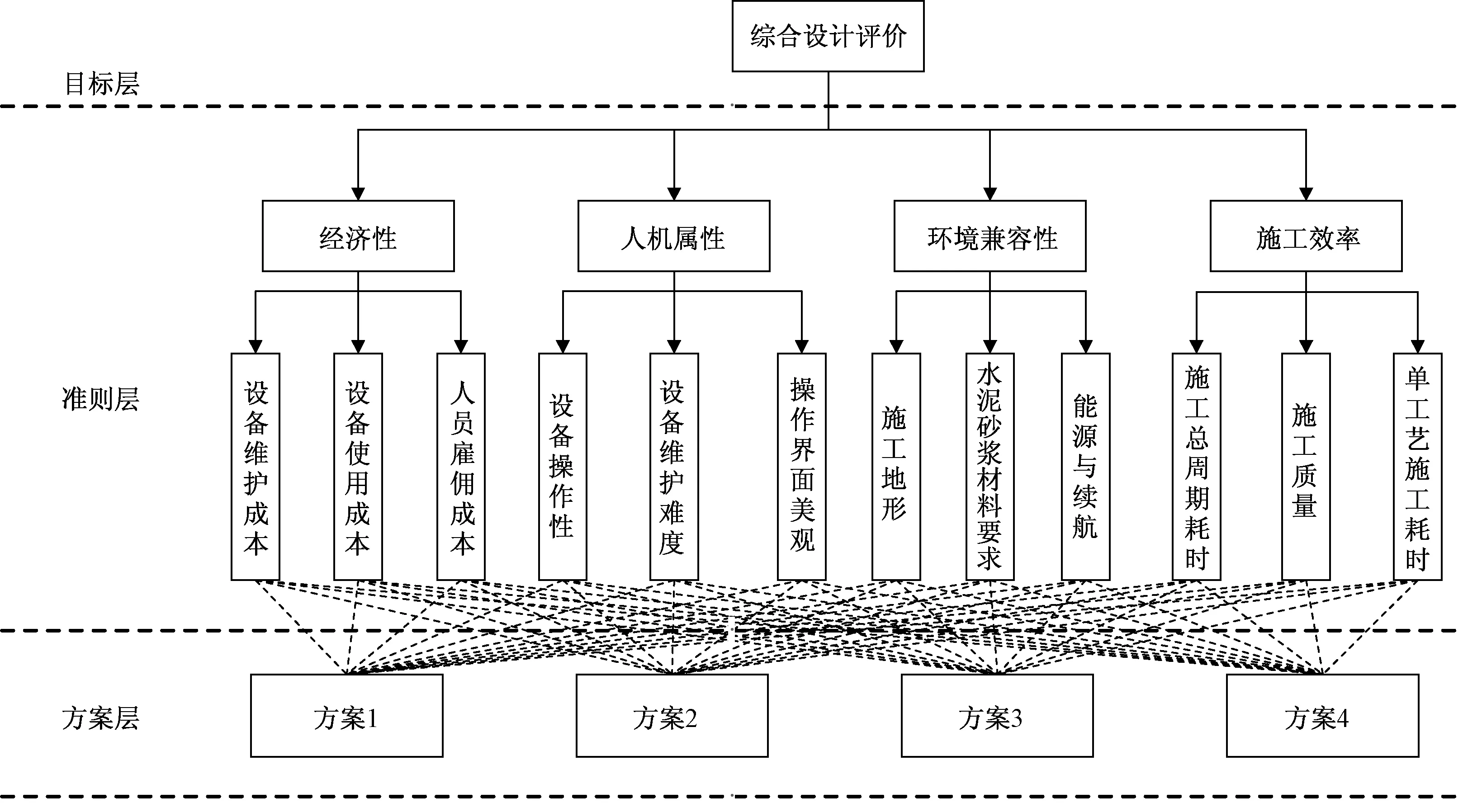
图5 地面找平机器人综合设计评价层次模型Fig.5 Design and evaluationhierarchy of ground screeding construction robot

表1 地面找平机器人设计综合评价的权重指标
式(1)中:n为指标的个数;aij=f(xi,xj)为指标xi和指标xj之间相比的重要性指标。当i=j时,aij=1;当i≠j时,aij=1/aji。f(xi,xj)的选择方法根据指标xi和xj之间的重要程度由1~9比较尺度得出。


(2)
式(2)中:RI为平均随机一致性指标;CI为一致性指标,表示的是判断矩阵的不一致程度,如式(3)所示。

(3)
式(3)中:λmax为矩阵的最大特征值。随机一致性RI的数值与矩阵阶数n相关,如表3所示。
然后计算验证判断矩阵的最大特征值并归一化,采用几何平均法,如式(4)所示,最终得到权重向量。

(4)
(5)

经过检验矩阵的一致性和表2的判断矩阵逻辑上正确,按照上述的方法,得到其他不同层次准则间的判断矩阵,计算权重比,如表4所示。

表2 判断矩阵A1~A4

表3 随机一致性指标对照表

表4 所有指标的权重
3 模糊层次分析模型
考虑到层次分析法得到的结果受专家的主观判断性影响较大,尤其是在准则层的指标较多时会导致数据量较大且权重难以确定的问题,为削弱这一负面影响,本文引入了模糊评价的思想。
3.1 模糊层次分析模型
模糊层次分析法模型是利用模糊数学的思想对层次分析法的主观判断进行补偿的一种评价方法[13]。传统的层次分析法是将不同层次不同指标间准则进行一一比较,由判断矩阵得到各个准则的权重。从而实现从定性到定量化的转变。在判定层次分析模型的权重比较中,通常会采用专家评估的方式形成对层次分析模型中准则层的因素之间的权重。这种方式往往会带入评估专家的主观想法,并且由于该方法认为因素之间的重要性只有一种情况,会导致比较过程的绝对性[14]。
3.2 评价指标与评价等级的模糊关系
评价标准集合U={u1,u2,…,um}是被评价对象的m个指标准则。评价集合V={v1,v2,…,vn}表示每一指标准则在专家调查问卷中的评价等级组成的集合,在本文中n=5,分别代表优秀(v1)、良好(v2)、一般(v3)、合格(v4)、差(v5)。准则层的每个指标都要逐个确定指标ui对评价集合V的从属程度。
最终可以得到U到V的模糊关系矩阵为
(6)
式(6)中:rij为评价对象的指标ui对vi等级的隶属度。
共计邀请50名专家对方案1(P1)、方案2(P2)、方案3(P3)、方案4(P4)的不同准则指标进行打分。以下表为例,表5表示专家对方案1的模糊评分。
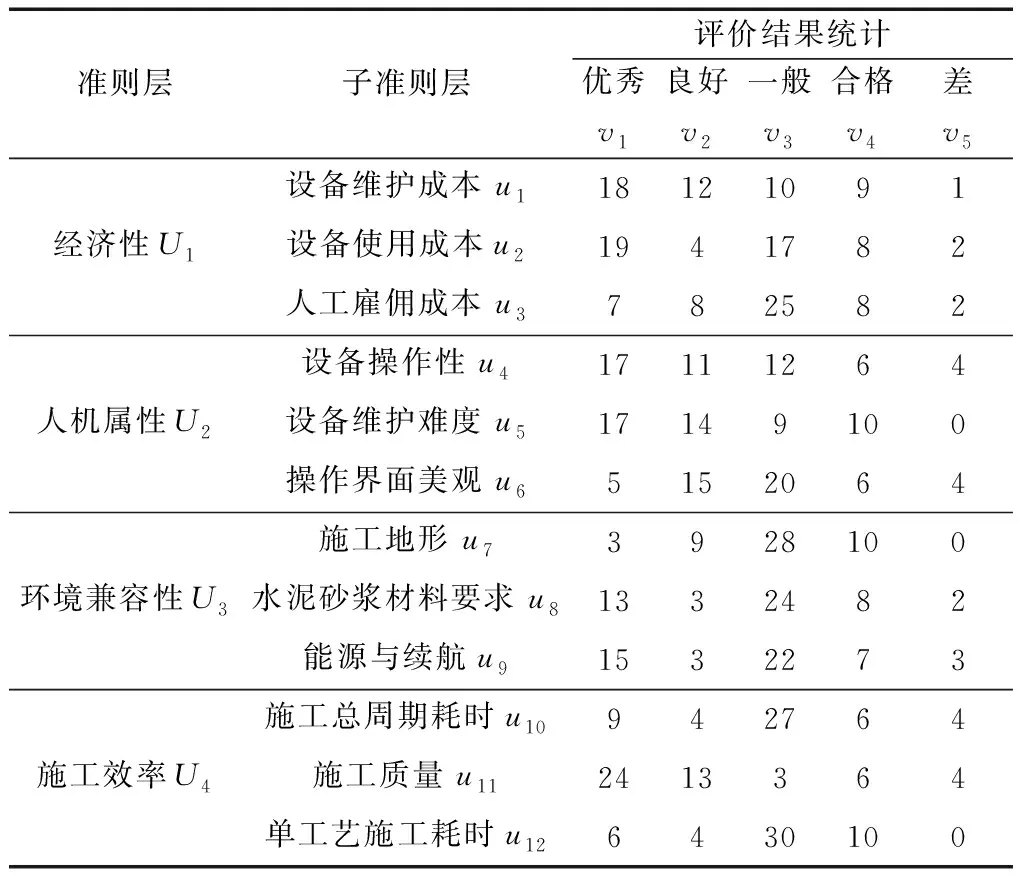
表5 专家对方案1的模糊评分汇总
根据表5中的数据,评价指标集合包括U1~U4,针对不同指标对象的模糊关系矩阵不同,其中经济性评价U1准则的模糊关系矩阵为
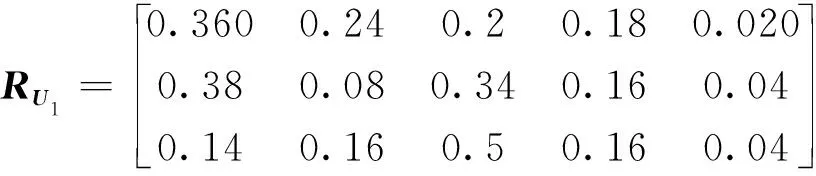
(7)
同理,P1方案的模糊关系矩阵可表示为

(8)
3.3 对设计方案的模糊评价
将上述准则权重与模糊关系矩阵进行合成运算,得到设计方案的综合模糊评价:
B=b1,b2,L,bn=W∘R
(9)
式(9)中:W为上文计算得出的权重向量;R为模糊关系矩阵;模糊评价向量B由两矩阵合成运算得到;∘为合成运算符。
根据最大隶属度原则,若模糊综合评价向量满足式(10),则评价对象属于r等级。
(10)
4 案例分析
根据上述的方案可以得到单一准则下不同方案的优势,以及所有准则下的方案最优解,通过分析不同方案在不同准则下的优势原因,结合最优解,制作地面找平机器人样机。
4.1 以经济性为指标的模糊评价
根据图5可知,经济性指标分为设备维护成本、设备使用成本、人工雇佣成本子指标,经济性指标下的模糊评价向量为
B11=W1∘R1
(11)
由表4可知,经济性下的指标权重W1为
W1=[0.450 0.159 0.391]
(12)
由表6可知,经济评价模糊关系矩阵R1为

(13)
根据式(11)~式(13)可得P1方案经济指标下的综合模糊评价向量:
B11=[0.277 0.183 0.34 0.17 0.031]
(14)
同理可得P2、P3、P4方案经济指标下各个子指标的综合模糊评价向量B2、B3、B4:
(15)
经过对模糊评价向量B的比较可以得到:P2>P1>P3>P4。
考虑方案2(P2)在经济性方面比较突出的原因是:工程车辆的设计制造比较成熟,设备的故障率较低,设备的维护成本较低。
4.2 以人机属性为指标的模糊评价
类比4.1节的方法可得

(16)
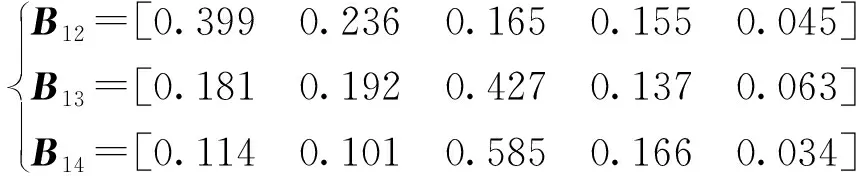
经过对模糊评价向量B的比较可得:P4>P1>P3>P2。
考虑到方案4(P4)在人机属性方面比较突出的原因是:设备的工作原理较为简单,对工人的素质要求较低,没有繁杂的操作界面,容易上手。
4.3 以环境兼容性为指标的模糊评价
同理,得:

(17)
经过对模糊评价向量B的比较可以得:P1>P2>P3>P4。
考虑到方案1(P1)在环境兼容性方面比较突出的原因是:方案1采用的是履带驱动的小车,履带的越障和爬坡能力较强,传感器模块较多且机身小巧,更适合在复杂环境下的找平施工。
4.4 以施工效率为指标的模糊评价
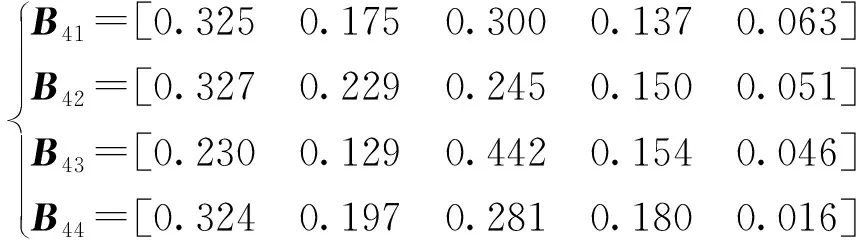
同理,得
(18)
经过对模糊评价向量B的比较可以得:P2>P4>P2>P3。
方案2(P2)在施工效率方面比较突出的原因是:方案2的找平刮板的宽,且有工人实时操作,既加快了施工速度,也能保证一定的施工质量。
4.5 多方案的模糊评价
方案1(P1)综合考虑经济性U1、人机属性U2、环境兼容性U3、施工效率U44个指标,根据式(5)、式(6)和表7可得

(19)
将式(19)代入矩阵运算可以得到B1:
B1=[14.904 8.072 16.984 7.493 2.497]
(20)
同理得其他方案:

(21)
经过对模糊评价向量B的比较可以得到:P3>P2>P1>P4。发现综合考虑各个指标的情况下,方案3(P3)的设计评价最为优秀,虽然在经济性和人机属性上牺牲了一部分优势,但在各个指标方面表现较为均衡,且在保证施工质量的前提下提高了找平施工的速度。
结合上述分析的评价方案制作出相应的地面找平机器人样机(图6),实际找平的混凝土表面的误差可达S=1.88 mm,达到地面找平的要求,并为后续瓷砖铺贴的工作提供精度保障。

图6 地面找平机器人样机及施工效果Fig.6 Ground leveling robot prototype and construction effect
5 结论
以地面找平机器人的设计为目的,以经济性、人机属性、环境兼容性、施工效率4个方面建立了综合设计方案评价指标体系。根据实际设计需要,利用层次分析法构建层级结构,利用专家库的数据建立不同指标层次间的权重向量,并引入模糊评价的方法,最终得出以下结论。
(1)比较了不同指标下的综合模糊评价,分析了不同指标下不同设计方案的优势,经过权重与模糊的复合运算,最终得到了门式结构找平机器人(方案3)为最优设计方案。
(2)通过分析多方案模糊评价的结果,以方案3为主要设计方向,并借鉴其他方案优势,设计出一款地面找平机器人样机,经过实验测试,地面找平机器人的施工误差可达S=1.88 mm,满足施工要求,且设计方案预先经过专家评价,有较高的实用价值和应用前景。
