马铃薯外部品质分级方法综述
2022-06-14姜宏于永波章翔峰陈宇彤
姜宏, 于永波, 章翔峰, 陈宇彤
(新疆大学机械工程学院, 乌鲁木齐 830017)
马铃薯被列为全球第四大粮食作物[1],其种植成本低,富含营养,由马铃薯作为原材料可以加工出许多美味的食物。马铃薯深受各国民众的喜爱,它提供的纤维、维生素、矿物质等可以帮助人类抵御疾病,有益于人类健康[2]。中国是马铃薯种植大国,却不是马铃薯销售强国[3]。其中一个重要原因就是在大批量的马铃薯收获后,外部品质参差不齐的马铃薯未能按照某一指标进行分级,继而不能获得最大的经济效益[4]。随着人类直接消费和食品加工对马铃薯外部品质的要求不断升高,马铃薯的外部品质分级就显得至关重要[5]。同时,马铃薯分级是马铃薯产后的一个重要环节,通过对马铃薯进行分级包装、分级贮藏、分级定价、分级加工,从而解决马铃薯的价格与其品质不对等的问题[6]。因此,基于外部品质的分级在马铃薯的包装、销售和二次加工中有着重要作用。
目前,马铃薯的外部品质分级研究主要分为人工分级、机械分级和基于机器视觉分级3种方法[7]。人工分级作为最早采用的分级方法一直沿用至今,人工分级方法劳动力成本高、效率低下、分级标准模糊,主观性强。随着马铃薯的分级需求不断增长,人工分级早已不能满足要求[8]。机械分级方法相比人工分级方法提高了分级效率,但只是针对马铃薯的单一大小特征进行分级,且在分级过程中会不可避免地出现二次损伤现象[9]。目前,关于机械分级的研究主要集中在研制不同类别的机械分级机,设计改进其主要工作部件,优化零件的重要参数,使分级效率达到最优,同时尽可能降低分级过程中所带来的二次损伤[10]。机器视觉分级方法具有经济性、客观性、高指标性的优点,是近几年的研究热点[11]。相关研究主要聚焦在针对马铃薯的大小特征、形状特征和缺陷特征开展[12]。大小特征分级主要利用马铃薯的简单几何特征(周长、面积、长短轴直径和体积等)和深度图像进行分级。形状特征分级主要采用简单几何特征法、傅里叶形状描述子法、区域不变矩法和三维重建法。对于缺陷特征分级,现有的研究主要针对某一特定缺陷自身特点,结合机器学习算法提取特征,或利用深度学习自动学习缺陷特征,构建分类模型进行分级。
目前,关于马铃薯外部品质分级的研究有很多,采用的方法也各不相同,但却缺少对马铃薯外部品质分级方法的系统性梳理。针对这一现状,总结现有研究成果的外部品质分级方法,分析人工分级、机械分级和机器视觉分级所采取的手段,总结3种方法存在的优缺点。最后指出机械分级和机器视觉分级的研究趋势,为马铃薯外部品质的分级提供新的研究思路。
1 人工分级
早期马铃薯的分级都采用人工分级的方式,这种分级方式虽然简单直接,但是需要操作者手动分级。手动过程非常繁琐、费力、劳动力成本高、效率低下,只适用于小批量分级[13]。且人工分级没有精细的判别标准,无法精确区分不同级别的马铃薯,受操作者主观因素影响大[14]。
2 机械分级
随着科技的进步,马铃薯的分级都采用通用式果蔬分级设备,但是仍然无法满足实际需要,分级精度和分级效率仍然达不到要求[15]。人们迫切需要专用的马铃薯分级机械装置来满足日益增长的马铃薯分级需求。
马铃薯机械分级机可分为网眼式分级机和辊杆式分级机[16]。网眼式分级机凭借其精准的网眼可以实现精确分级,应用非常广泛。辊式分级机通过调节相邻辊杆的间距,从而完成不同大小的马铃薯分级。
2.1 网眼式分级机
2.1.1 振动网筛式分级机
刘洪义等[17]设计的马铃薯分级机,利用筛片多层振动完成分级,筛片可根据不同的分级要求更换。德国GRIMME公司生产的WG900网眼式分级机通过精确尺寸的橡胶网格筛孔和多台网格分级机前后相连可同时分选出不同规格的马铃薯[18]。图1所示为WG900网眼式分级机。

图1 WG900网眼式分级机[18]Fig.1 WG900 mesh type grading machine[18]
网眼式分级易出现马铃薯卡顿在网眼上,会使得后落入网眼的马铃薯得不到分级。不同的网眼大小可将大小相近的马铃薯归类,但是网眼式分级级别不易更改,分级效率也不高。
2.1.2 滚筒式分级机
滚筒式网眼分级机是由滚筒、机架、上料装置、出料口和电动机组成。马铃薯进入滚筒后,靠滚筒旋转的离心力来筛分马铃薯,经由出料口完成分级。
滚筒式分级机在旋转过程中容易对马铃薯表面造成划痕、表皮脱落等缺陷。另外,如果改变了马铃薯的分级标准,只能拆卸原有滚筒,更换合适的滚筒孔径,进而完成分级。
2.2 辊杆式马铃薯分级机
申屠留芳等[19]设计的马铃薯分级机是一种简易辊杆式马铃薯分级机,它主要是由上料装置、分选装置、出料口组成,如图2所示。当分级机进行工作时,进入分级机的马铃薯小于辊杆缝隙的落入接料装置,大于辊杆缝隙的马铃薯则继续前进,随着辊杆之间间距的不断增大而在不同的部位上落下来,从而分成3个等级。

图2 简易辊杆式分级机[19]Fig.2 Simple roller type grading machine[19]
姜彦武等[20]设计了一种可调的辊式分级机,通过调节辊杆之间的距离来进行分级。刘少达等[21]设计了一种中心距可调的动辊杆和定辊杆相组合的马铃薯分级机。通过分析分级过程中马铃薯的受力情况,发现链条传送速度过快会造成马铃薯相互碰撞,产生二次损伤,分级效果不佳。因此,合理的分级运行速度就显得至关重要。吕金庆等[22]设计了一种差动分级装置,通过改变提升角的大小来设定不同的分级范围,实现了连续分级。研究表明,该装置提高了分级效率和分级精度。张永志等[23]为了解决机械分级中产生的二次损伤问题,改进辊杆材料与形状,设计了一种辊式尼龙刷马铃薯分级机。研究表明,分级过程中降低了马铃薯的损伤率,分级精度得到了提高。但是必须要严格控制电机转速和辊组倾角等,分级机的效率才会达到最优。
综上,对于辊杆式马铃薯分级机,必须要合理确定分级机辊子直径、辊子转速、辊子间隙、辊子组数等重要参数。辊杆间缝隙变化的稳定程度及如何降低马铃薯在辊杆间运动的损伤程度是目前亟需解决的问题。
机械分级相比人工分级,省工省时,减轻了劳动强度,提高了工作效率。但是机械分级方法的缺点也很明显。
(1)马铃薯在分级过程中不可避免地会出现不同程度的二次损伤,损伤的表面暴露在空气中会进一步恶化,最后发展成黑斑,给马铃薯增添新的缺陷。
(2)利用机械装置分级基本都针对的是马铃薯的大小特征,没有考虑马铃薯的形状等其他特征,畸形马铃薯很容易发生错误分级。
(3)在马铃薯的生长过程中,很容易产生虫咬、绿皮等缺陷,这些有缺陷的马铃薯经过机械分级后会混杂在分级好的马铃薯当中,这在一定程度上降低了马铃薯的整体品质。
3 机器视觉分级
过去几年,关于马铃薯外部品质分级的研究取得了很大的进步,主要是由于机器视觉的快速发展。机器视觉技术在检测马铃薯外部品质方面具有客观性、经济性和高指标性等优点[11]。同时,基于机器视觉的分级方法还可以避免机械分级所带来的二次损伤。现阶段相比于机械分级方法,机器视觉分级可以不光局限于马铃薯的单一大小特征进行分级,还可以针对马铃薯的形状特征和缺陷特征来分级[24]。按照大小特征、形状特征和缺陷特征分类,机器视觉分级方法可按照如图3所示的方式进行分类。
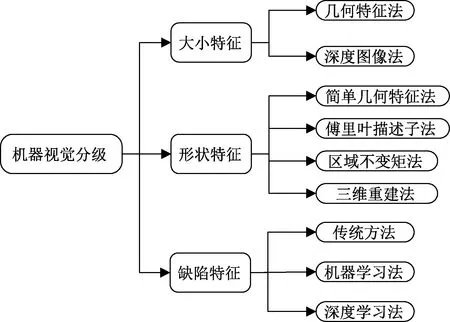
图3 机器视觉方法分类[24]Fig.3 Classification of machine vision methods[24]
3.1 基于大小(质量)特征的马铃薯分级
利用机器视觉对马铃薯按照大小特征分级,几何特征方法都是首先采集马铃薯的单幅或多幅图像,而后对采集到的图片进行预处理操作[25]。但在几何特征的选择上各不相同。常用的几何特征有短轴直径、长轴直径、面积、周长、外接柱体体积、体积等。利用这些几何形状特征可以建立与马铃薯的质量相关性,进而完成马铃薯的质量分级。深度图像法则是通过获取的图像深度信息构建马铃薯三维模型,通过构建的三维模型预测马铃薯的大小。
3.1.1 几何特征法
郑冠楠等[26]将马铃薯的最长轴长度作为分级特征,根据所设定的阈值将马铃薯大小分为4个等级。研究表明,分级准确率在88%以上。郝敏等[27]利用马铃薯的面积特征,采用逐步回归分析法筛选参数,最终选用马铃薯的俯视图面积和侧面积,建立了单个马铃薯的质量模型。研究表明,该模型对马铃薯质量的分级正确率较高。林泽鸿[28]提出了基于最大横切面积的马铃薯大小分级,首先计算出马铃薯的最大横切面积,然后和已经设定好的阈值作比较,将马铃薯分为4个等级。研究表明,该方法的分级准确性达到了92.5%。孔彦龙等[29]将马铃薯的面积和周长作为分级特征,实现对马铃薯的质量分级。研究表明,该模型的准确率可达95.3%。周竹等[30]首先求出马铃薯最小外接柱体的底面积和高度,而后得到体积,将马铃薯分为大、中、小三类。研究表明,对马铃薯按照大小分级的准确率稳定在87.5%以上。Su等[31]将一种基于深度图像的图像处理算法成功地应用于马铃薯质量分级,该方法特别适用于形状不规则的马铃薯样本分类。研究表明,体积与质量密切相关,利用该体积预测模型对马铃薯进行质量分级的成功率达90%。马铃薯质量与面积和周长都具有很高的相关性,王溯源[32]通过实验发现,单角度测量面积法存在着质量误差较大的缺点。若是采用三角度测量面积来预测马铃薯质量,其预测准确性将得到很大的提高。
3.1.2 深度图像法
Su等[33]使用两个深度图像构建3D马铃薯表面模型,使得马铃薯体积计算的精度更高。研究表明,体积与质量的相关性更高,使用该体积密度模型对马铃薯大小分级的成功率达到了93%。Su等[34]开发了一个马铃薯自动分级系统,以深度成像系统作为数据收集器,并应用卷积神经网络进行马铃薯外部品质分级。研究表明,总体质量分级准确率为86.6%。
综上,基于机器视觉的马铃薯质量分级借助马铃薯的直径、周长、面积和体积特征参数达到了较高的准确率。近年来,又出现了利用深度相机的深度图像构建3D马铃薯表面模型。二维图像相比于三维物体并不能完整准确地表达出马铃薯的所有特征信息。因此,对马铃薯表面进行三维重建,获取三维信息,将会得到更加精确的质量预测模型。但是,获取深度图像的深度相机价格昂贵,若是通过单目或者双目视觉来获取深度信息难度大,而且三维重建所带来的数据量提升对数据处理、计算能力都提出了更高的要求。
3.2 基于形状特征的马铃薯分级
马铃薯有很多可能的形状,它们的形状受到生长环境的影响,造成各种各样的边界不规则。形状对于二次加工有着重要意义。目前在基于机器视觉的马铃薯形状检测研究中,所用到的方法有4种。第1种是用马铃薯外部直观的几何特征,如轮廓面积、椭圆度、离心率和横纵径之比等;第2种是傅里叶形状描述子法;第3种是区域不变矩法,常用的不变矩主要有Zernike矩、边界矩等;第4种是目前使用较少的三维重建法。
3.2.1 简单几何特征法
王红军等[35]提取马铃薯的轮廓面积、外接矩形,用于马铃薯形状分级。采用主成分分析方法分析图像特征参数与马铃薯形状之间的关系,构建马铃薯形状预测模型。研究表明分类正确率为86.7%。郑冠楠等[26]把马铃薯的离心率作为分级特征,将马铃薯分为类圆型和类椭圆型两类,取三幅图像中最大的离心率值,将其值与1比较,完成形状分级。研究表明,分级准确率在88%以上。邓立苗等[36]通过计算椭圆度来估计形状。研究表明,所提出的分级算法对形状的检测正确率为93.3%。周平等[37]以马铃薯的最大横径与最大纵径之比确定了马铃薯形状分级规则。研究表明,该方法以较高准确率确定了马铃薯的不同形状。Nan等[38]利用马铃薯圆的方差、纵横比和矩形度提取最小外接矩形作为特征,然后在支持向量机上进行训练,建立马铃薯形状判断模型。研究表明,各形状的马铃薯预测准确率均在86%以上。
3.2.2 傅里叶形状描述子法
Tao等[39]提出了一种基于傅里叶变换的形状分离方法,用于马铃薯形状的自动检测。研究表明,该检测系统对马铃薯的形状分级精度达到了89%。汤哲君等[40]提出基于极半径的傅里叶描述子算法,利用欧式距离对马铃薯的形状进行分级。研究表明,该方法能够较好地描述马铃薯的形状特征,分级效果良好。崔建丽等[41]提出基于边界点的矩特征傅里叶描述子的马铃薯薯形识别方法。研究表明,该方法对经过平移、旋转的马铃薯图像分级具有很好的鲁棒性,最终将马铃薯分为椭圆、圆和畸形三类,其准确率都在90%以上。
3.2.3 区域不变矩法
孔彦龙等[29]将马铃薯俯视图像的6个不变矩作为分级特征输入到BP神经网络中。研究表明,形状分级正确率为96%。郝敏等[42]将Zernike矩作为形状分级的特征参数,并用支持向量机将马铃薯的形状分为良好和畸形两类。研究表明,良好和畸形的分级正确率达到了93%和100%。崔胜春[43]推导出改进的基于图像边缘的不变矩来作为马铃薯的形状分级特征,实验发现,利用图像的边缘矩能减小算法运行时间,提高实时性能,分级准确率可达95%。Azizi[44]提出一种结合几何参数和傅里叶描述子的方法专门检测畸形马铃薯,使用主成分分析法(principal component analysis, PCA)选择7个最突出的特征。研究表明,该方法仅选取7个特征即可获得较高的正确率,对训练集的平均正确率为98%。
简单几何特征法、傅里叶形状描述子法、区域不变矩法都是常用的马铃薯形状分级方法。马铃薯的形状在生长过程中容易受到外界的影响,其形状复杂,只用几个简单的几何特征无法来判定形状复杂的马铃薯。并且当同一幅图像发生旋转、缩放等情况时,其几何参数都将会发生改变。傅里叶形状描述子法对圆形、椭圆形马铃薯效果良好,但是同样对形状复杂的畸形马铃薯就不适用了。区域不变矩法由于对经过平移、旋转、缩放的图像具有很高的鲁棒性,应用广泛。
3.2.4 三维重建法
目前针对马铃薯形状特征的分级大都集中在二维层面。近年来,开始出现了在三维层面对马铃薯分级的研究。杨耀民[45]提出了基于马铃薯的多张二维轮廓图像重建三维图像的方法,构建出马铃薯的三维模型,达到了马铃薯快速、精确的三维重建要求。研究表明,该方法应用于马铃薯形状检测的精度达到98%。
基于形状特征的分级在二维层面已相对成熟,但在三维层面的研究相对缺乏[46]。对马铃薯进行三维重建,可以提供高度准确的马铃薯体积测量,可以依据更加精确的体积参数对马铃薯进行分级[47]。
3.3 基于缺陷特征的马铃薯分级
马铃薯有绿皮、虫眼、机械损伤、畸形、发芽等外部缺陷[48]。根据不同的缺陷类别对马铃薯进行分级,可以进一步提高马铃薯的利用率。现有的研究主要针对某一缺陷类型进行检测[49],获得了多种检测方法。基于缺陷的马铃薯分级可分为传统方法、机器学习方法和深度学习方法。
3.3.1 传统方法
传统方法从缺陷的颜色、面积和几何形状特征出发,对马铃薯实现分级。Tao等[50]提出了一种绿皮马铃薯和正常马铃薯的分级方法。使用HSL(色调、饱和度和亮度)颜色空间,通过用色调直方图表示特征并应用多变量判别技术,视觉系统在分级时达到了90%以上的准确率。周竹等[30]根据不同缺陷的特点,分成3类缺陷。用面积来识别第一类缺陷(空洞、虫眼),用外接矩形的最大对角线长度来识别第二类缺陷(机械损伤),用交叉法来识别第三类缺陷(发芽、畸形)。研究表明,3类缺陷马铃薯的识别率都达到了90%以上,其中第三类缺陷的识别率最高。李锦卫等[51]提出将缺陷区域使用灰度截留法分割出来,而后利用面积比率和十色比率作为缺陷判别特征来识别缺陷。研究表明,正确识别率为93.6%,同时有少数样本不能正确分类,且该实验仅针对黄色薯皮的马铃薯。刘浩等[52]提出计算彩色图像各个通道分量的平均值和目标图像任一点上的差方值,进而得到标准差。小于阈值的点判定为缺陷点,并对马铃薯有缺陷部分的像素点连通区域进行标记。实验采用1 000个实验样本,根据连通域的面积、数目和颜色分量来判定缺陷的类别。研究表明,该方法分级准确率较高。
可以看到,色调直方图法、面积法、外接矩形法、灰度截留法和连通域法都以较高准确率完成了马铃薯的缺陷分级。但是,每种方法都是针对马铃薯的某一特定缺陷设计的,对实验样本的依赖性很高,都只能针对单一品种的马铃薯。实际上,马铃薯品种多样,不同品种的马铃薯颜色和形状差异较大,所得出的实验参数也会不同。
3.3.2 机器学习方法
基于统计学的机器学习方法使马铃薯的分级更加准确、稳健,成本更低[53]。常用到的机器学习算法有:主成分分析法(principal component analysis, PCA)、线性感知机算法(perceptron linear algorithm, PLA)、K-最近邻分类算法(K-nearest neighbor, KNN)、遗传算法(genetic algorithm, GA)、朴素贝叶斯(naive bayes, NB)、线性判别分析(linear discriminant analysis, LDA)和支持向量机(support vector machine, SVM)等[54]。
向静等[55]利用PLA识别绿皮缺陷、KNN识别发芽缺陷,最终实现马铃薯缺陷的分级。研究表明,两种缺陷的马铃薯正确识别率都在90%以上。Dacal-Nieto等[56]设计了一种特别的遗传算法,用于优化搜索更好的特征组合,使分类百分比最大化。将马铃薯分为3类:健康、绿皮和腐烂,实验数据表明,3种类别的平均识别率为86.9%。史崇升等[57]提取灰度图像和彩色图像的纹理特征,利用贝叶斯分类器建立模型。研究表明,该方法可提高马铃薯各类缺陷的识别率。Noordam等[58]根据颜色缺陷进行分级,利用LDA和马氏距离分类器将RGB像素分为6个不同的颜色类别。对5个马铃薯品种进行6个颜色类别的像素分类实验,正确率均在90%以上。李颀等[59]提出一种颜色和纹理特征融合的分级方法,使用SVM将马铃薯分为3类。研究表明,该方法的分级准确率可达97. 67%。Xiong等[60]提出了一种基于SVM和PCA的马铃薯分类识别方法。该方法实现了对普通马铃薯、绿皮马铃薯、发芽马铃薯和机械损伤马铃薯的有效检测和分类。综合分类识别率达到96.6%。Er等[61]利用改进的模糊C均值算法成功地对马铃薯进行分级。将图像采集设计与算法相结合,为马铃薯分级提供了一种新的方法。研究表明,对马铃薯的绿皮、裂纹和腐烂3种缺陷的分级准确率可达95%以上,但是一些没有缺陷的马铃薯被错误分类了。
KNN、NB、LDA和SVM在马铃薯的分级中应用广泛,而且都达到了很高的准确率。但是,机器学习算法众多,每种算法都有各自的特点。对于KNN,若已知数据分布信息很少,便可以使用KNN,因为它不对数据做出任何假设。值得注意的是,KNN 通常需要大量的处理时间。NB算法适用于对数据分布和不同特征之间的相关程度有很强先验知识的任务,但它对于不同特征的组合表现不佳。像NB一样,LDA也适用于已知的数据分布,但它能够学习不同特征之间的相互作用。K-means聚类在数据点明显可分时效果很好,如果类别有重叠,则K-means 算法不适合。因此,根据每种算法的特点,将合适的算法应用于特定的场合就显得至关重要。
3.3.3 深度学习方法
深度学习是一种最新的现代图像处理和数据分析技术,具有良好的结果和巨大的潜力[62]。随着深度学习在农业领域的成功应用,它最近也应用到了马铃薯分级当中[63]。目前,卷积神经网络已开始出现在马铃薯缺陷分级中,但采用深度学习的方法仍然较少。
刘冲冲[64]设计了一个共有15层的卷积神经网络,除输入输出层外,有7个卷积层,最后一层卷积层用来对数据进行降维,4个池化层,2个全连接层。并利用梯度下降算法优化识别网络,研究表明,马铃薯缺陷识别率达到94.1%。杨森等[65]提出一种基于轻量卷积网络的在线分级方法。首先建立马铃薯预训练网络模型;然后重新构建5类缺陷全连接层,并通过迁移学习在预训练网络模型上训练马铃薯缺陷数据集。研究表明,训练准确率最高可达98.88%。
深度学习提供了更好的性能并且优于其他流行的图像处理技术。相比传统方法,不需要人为手动设计特征,模型会自动学习出特征,其泛化能力更强。尽管深度学习比其他传统方法需要更长的训练时间,但其测试效率非常快。然而,使用深度学习的一个相当大的缺点是需要庞大的数据集作为训练过程中的输入,如果数据集太小,模型很容易就会发生过拟合[66]。
4 结论与展望
现阶段马铃薯分级通常可分为人工分级、机械分级和基于机器视觉分级3种方法。人工分级非常普遍,这种方法的最大优点就是简单直接,但是由操作者主观来判断类别,没有精细的判别标准,主观性太强。机械分级方法避免了人工分选时对马铃薯的模糊判别,同时提高了分级准确率和分级效率,节省了劳动力。但机械分级最大的弊端就是马铃薯在分级过程中不可避免地会出现不同程度的二次损伤。机器视觉检测是一种典型的无接触检测,避免了机械分级带来的二次损伤,同时又可进一步提高分级精度和分级效率,还可依据多种指标对马铃薯分级。各种分级方法的优缺点如表1所示。
对于机械分级方法,在原有不断提高分级精度和分级效率的基础上,需要在以下几点有所突破。
(1)如何最大程度地减小马铃薯在分级过程中的二次损伤。
(2)拥有更加灵活的分级调节装置,更加稳定的机械分级装置性能。
(3)与机器视觉分级方法结合更加紧密。
对于机器视觉分级方法:
(1)基于大小和形状指标的分级在二维层面已相对成熟,但在三维层面的研究相对缺乏。对马铃薯进行三维重建,可以提供高度准确的马铃薯体积测量,可以依据更加精确的体积参数对马铃薯进行分级。
(2)基于缺陷类别指标的分级,现有的机器视觉方案大多数针对某一种缺陷,对环境样本依赖性强。未来,结合颜色和深度相机提供的3D形状信息的4D模型将是马铃薯缺陷分级的新方法。
(3)马铃薯品种多样,不同品种用途、价值也不同。在原有大小、形状和缺陷类别指标的基础上增添新的分级指标,如品种、表面光滑度等。
(4)目前,深度学习方法在现有马铃薯分级研究中使用较少。未来,深度学习方法在马铃薯的缺陷分级中有广阔的应用前景,会出现更复杂的架构,将各种深度学习模型和分类器组合在一起,或者将手工设计的特征与自动提取的特征相结合,融合在一起以改善整体结果。另外,在原有提高分级准确率的基础上,提高算法的实时性、鲁棒性,增强模型的泛化能力是下一步的工作重点。
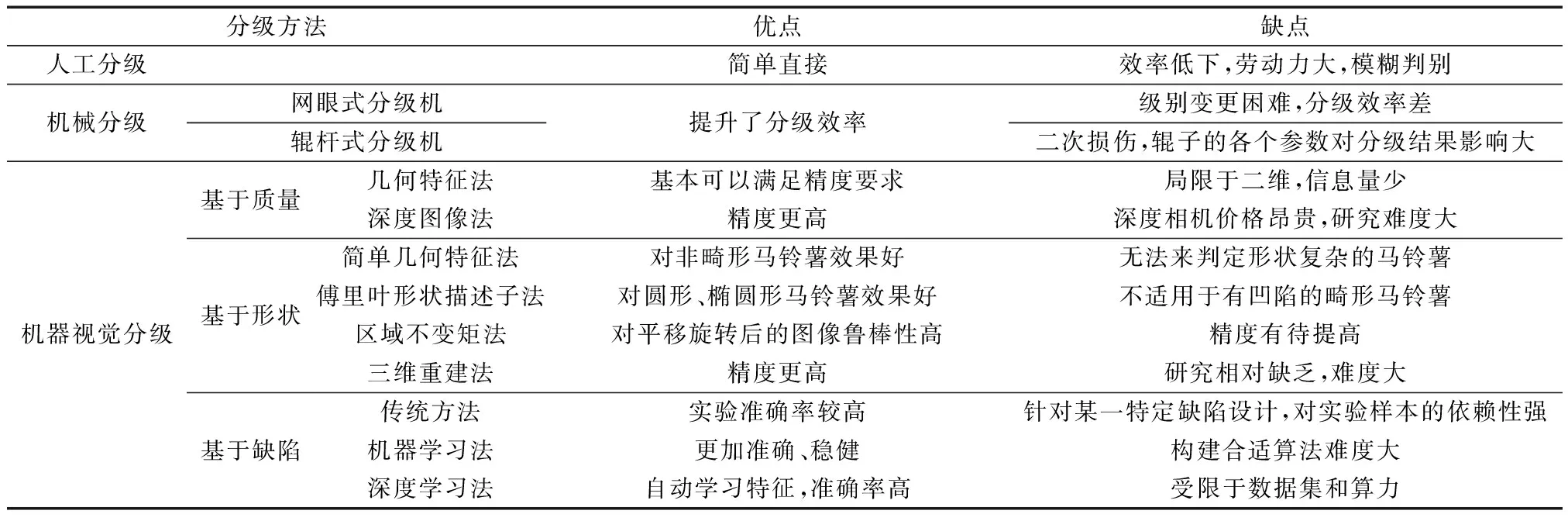
表1 马铃薯分级方法优缺点比较Table 1 Comparison of advantages and disadvantages of potato grading methods
