基于机器视觉的晶片中心位置精密测量
2022-06-10尹婉婉张静王宁赵文辉
尹婉婉,张静,王宁,赵文辉
(沈阳工业大学机械工程学院,辽宁 沈阳 110870)
现代电子信息行业的快速发展,使得电子元件产品在逐渐向微型化、集成化和高可靠性的方向发展[1].晶片作为当今电子设备不可缺少的关键器件,市场需求量日益增加,为了实现高效率的检测可以采用流水线自动化检测的方式,为了让机械手准确的抓住晶片,需要对生产线上的晶片进行精确定位.吴晓[2]提出一种LED 芯片椭圆定位方法,该方法通过径向幅射线的梯度变化阈值求出特征点,根据特征点拟合出椭圆,求出LED 芯片的定位中心和旋转角,但有时椭圆定位会比较困难,因为物体在视觉系统中的显示方式会受到多种变量的影响.蔡竞[3]提出的基于矩形拟合的贴片定位算法,得到贴片的中心偏移量和偏转角度,该算法简单准确,但得到的坐标是整像素级.Chen 等[4]提出一种基于波束突破法的晶片中心位置定位方法,该方法利用两个光学传感器的时间序列信号计算晶圆中心,但在测量过程中,缺口通过传感器对定位精度有轻微影响.
基于以上晶片中心位置检测存在的问题, 本文提出一种基于膨胀和Facet 亚像素算法的机器视觉精密测量方法, 主要利用数字图像处理技术对采集的定位盘图像和晶片图像进行自适应阈值分割、Canny 像素级边缘检测、膨胀、Facet 亚像素边缘提取等处理,完成对晶片定位盘和晶片中心的定位,确定晶片定位盘的中心位置和位置偏差、晶片的中心位置及偏转角度,方便机械手的抓取.
1 定位盘和晶片检测原理图
检测定位盘中心位置和位置偏差的原理图如图1 所示.
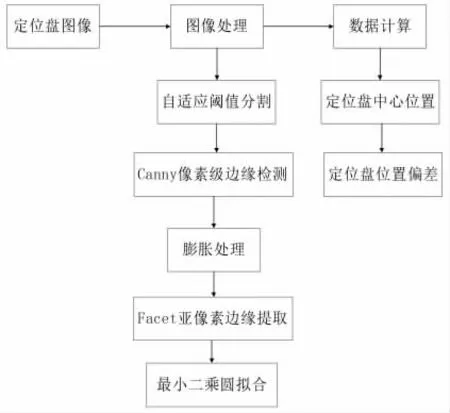
图1 检测定位盘中心位置和位置偏差原理Fig.1 Schematic diagram of detecting the center positionand position deviation of the locating disk
检测晶片中心位置和偏转角度的原理图如图2 所示.
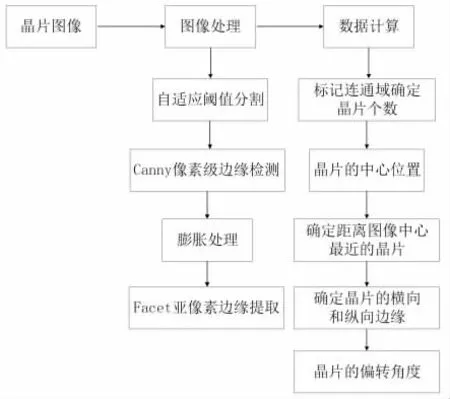
图2 检测晶片中心位置和偏转角度原理Fig.2 Schematic diagram of detecting wafer center positionand deflection angle
2 图像预处理和亚像素边缘检测
2.1 自适应阈值分割
阈值分割是根据灰度值的分布特性设定某一阈值来进行图像分割的一类方法.通过比较灰度图像中的各像素值与阈值的大小关系,把灰度图像中的各像素值分成大于阈值和小于阈值两部分,转化为只有0 和1 两个灰度级的图像,即黑与白[5].阈值的选择直接决定了分割效果的好坏,所以,阈值分割方法的重点在于阈值的选择.阈值选择的原则是既要保存图像信息,又要尽可能减少背景的干扰.
本文采用模式分类的思路来寻找合适的阈值,即类内数据尽量密集,类间尽量分离[6].按照这个思路,把所有的像素分为两类,属于“同一类别”的对象具有较大一致性,属于“不同类别”的对象具有较大的差异性.本文遵循类间方差最大的原则,运用最大类间方差法[7-8](OTSU)来对进行自适应阈值分割.
2.2 Canny 像素级边缘检测及膨胀处理
Canny 边缘检测算子具有3 个优异的性能[9-11]:
(1)高信噪比.意味着当检测到边缘时,将非边缘点确定为边缘点的概率最低.
(2)定位性能更好.提取边缘时,提取的边缘线应位于实际边缘线的中心.
(3)对单个边缘的独特响应,最大限度地抑制假边缘.
Canny 边缘检测的基本原理是先利用二维高斯函数任意方向上的一阶导数对图像f(x,y)进行卷积滤波,然后对滤波后的图像寻找图像梯度的局部极大值作为边缘.边缘检测的具体步骤如下:
步骤1:采用二维高斯函数对图像进行高斯平滑;
步骤2:计算滤波后图像的幅值和方向;
步骤3:对梯度幅值进行最大值抑制,找出梯度图像中局部极值点,非局部极大值点置为零;
步骤4:采用双阈值法检测连接边缘.
由于获取的定位盘圆边缘是不连续的,因此对其进行图像膨胀处理,使其圆形边缘数据连续.膨胀是一种基于数学形态的边缘信息提取方法[12],通过定义的结构元素,与原图二值图像进行逻辑运算,输出运算结果,实现图像的膨胀,使其连续.
2.3 基于Facet 曲面模型亚像素边缘提取
本文采用基于Facet 曲面拟合的亚像素边缘检测算法提取亚像素边缘,该算法抗噪能力强、定位精度高[13-14].
本文采用的Facet 模型为2D Facet 模型,如式(1)所示

式(1)中:x,y是像素的坐标,是未知系数.
为了保证算法的位置是不变的,以粗边缘点为原点,建立一个局部坐标系,则亚像素点在粗边缘像素中的位置如图3 所示.
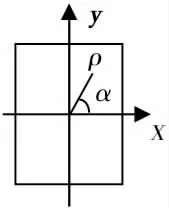
图3 亚像素边缘点在粗边缘像素中的位置Fig.3 Position of sub-pixel edge points in coarse edge pixels
则有

式(2)中:ρ是亚像素边缘点到坐标原点的距离,α是梯度方向.将式(2)带入式(1),可得

多项式的一阶、二阶导数分别为式(4)和式(5)

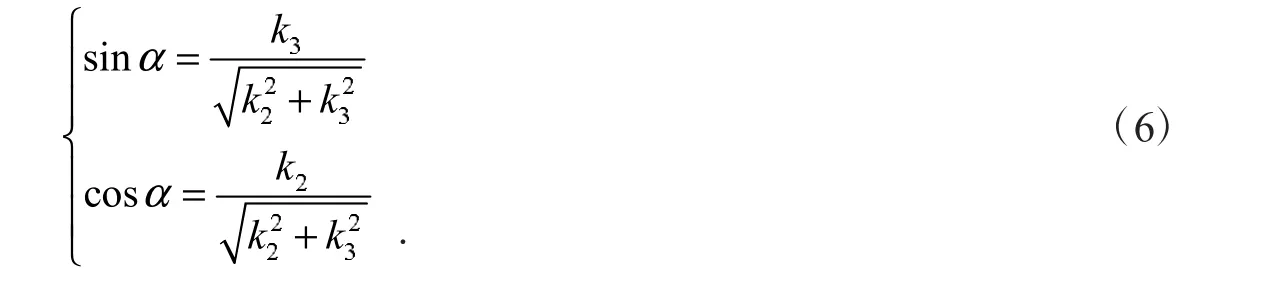
梯度模值为式(7)


将式(6)、式(8)代入式(9),可求得边缘点的亚像素坐标.

3 实验与分析
搭建视觉测量系统所采用的主要硬件为:Basler PiA2400-17 全帧型面阵CCD 黑白相机,其分辨率为2448 像素×2050 像素;TC-2348 双远心镜头,视野范围为48 mm×36 mm,景深为20 mm,畸变率<0.1%;LED 平行光源,照明方向为背向照明,光源控制器采用脉冲宽度调制方法,分1000 级调节,对应光源电源电压为0~24 V.
3.1 晶片定位盘中心位置和位置偏差检测实验
晶片定位盘作为放置晶片的基准平台,在检测晶片前,需要对其位置进行定位.晶片定位盘主要分为单圆晶片定位盘和多圆晶片定位盘两种情况,如图4 所示.

图4 晶片定位盘Fig.4 Wafer positioning disk
具体步骤如下:
步骤1 对定位盘图像进行自适应阈值分割,并通过Canny 算法提取晶片图像中的所有像素级边缘数据;
步骤2 由于获取的定位盘圆边缘是不连续的,因此对其进行图像膨胀处理,使其圆形边缘数据连续;
步骤3 利用Facet 曲面模型对图像进行亚像素边缘提取;
步骤4 由于获取的定位盘图像可能存在多个同心圆,从内向外逐步搜索各层圆数据,并对各同心圆边缘分别进行拟合,确定其中心位置,最终以内环权重为主,得到定位盘中心位置;
步骤5 将定位盘在图像中的中心位置与图像中心进行比较,得到定位盘的位置偏差.
定位盘阈值分割的图像如图5 所示.
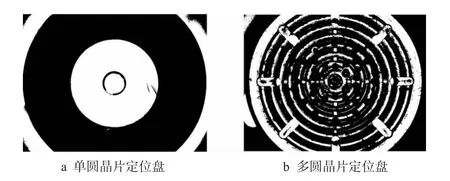
图5 晶片定位盘阈值分割图像Fig.5 Wafer location disk threshold segmentation image
利用Canny 算法提取的定位盘边缘如图6 所示.
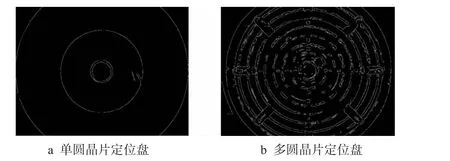
图6 Canny 算法提取的定位盘像素级边缘Fig.6 Pixel-level edgesofwafer positioning disk extracted by Canny algorithm
定位盘的Facet 亚像素边缘如图7 所示.
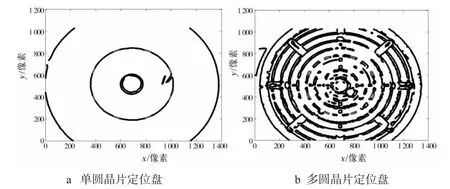
图7 定位盘的Facet 亚像素边缘Fig.7 Facet sub-pixel edgesofwafer positioning disk
由图5、图6、图7可以看出,采用本文提出的方法对晶片定位盘进行处理后,可以准确得到定位盘的圆边缘,保证圆边缘的连续性,同时可以得到Facet 亚像素边缘中同一圆上数据,即图像中的红色标记点,将这些数据进行最小二乘圆拟合[15],最终确定晶片定位盘的中心位置,将其和图像中心作比较,如表1所示.

表1 定位盘中心位置和图像中心Tab.1 Locating disk center positionand image center
从表1可以看出,检测出了单圆定位盘的位置偏差为1.5470 像素,多圆定位盘的中心位置为1.1563像素;整个图像处理时间约为140 ms.
3.2 晶片的中心位置和偏转角度检测实验
不同系列晶片的大小及样式均不相同,且可能出现晶片没有铺满定位盘的情况,为了准确检测晶片的位置,需要对获取的晶片图像进行处理,区分出视野范围内的晶片个数,并确定距离图像中心最近的晶片坐标及偏转角度.具体步骤如下:
步骤1 对于获取的晶片图像进行自适应阈值分割,并通过Canny 算法提取晶片图像中的所有像素级边缘数据;
步骤2 由于获取的晶片边缘是不连续的,因此对其进行图像膨胀处理,使晶片边缘数据连续;
步骤3 利用Facet 曲面模型对图像进行亚像素边缘提取;
步骤4 对图像中的连通域进行标记[16],并根据已知的晶片尺寸找出晶片所在的连通域,确定图像中的晶片个数,求出各晶片连通域的质心所在位置,即晶片的中心位置;
步骤5 计算所有晶片中心位置与图像中心位置的偏差值,从而确定距离图像中心最近的晶片;
步骤6 根据距离图像中心最近的晶片中心位置向外搜寻晶片的边缘,确定晶片的横向边缘和纵向边缘,从而求出晶片的偏转角度.
检测的晶片分布情况主要分为以下3 种情况,如图8 所示,即视野范围内只有一个晶片、视野范围内有多个晶片、视野范围内有多个晶片且有空余位置.

图8 晶片分布情况Fig.8 Wafer distribution
对视野内单个晶片、视野内多个晶片、视野内多个晶片且有空余进行自适应阈值分割如图9 所示.
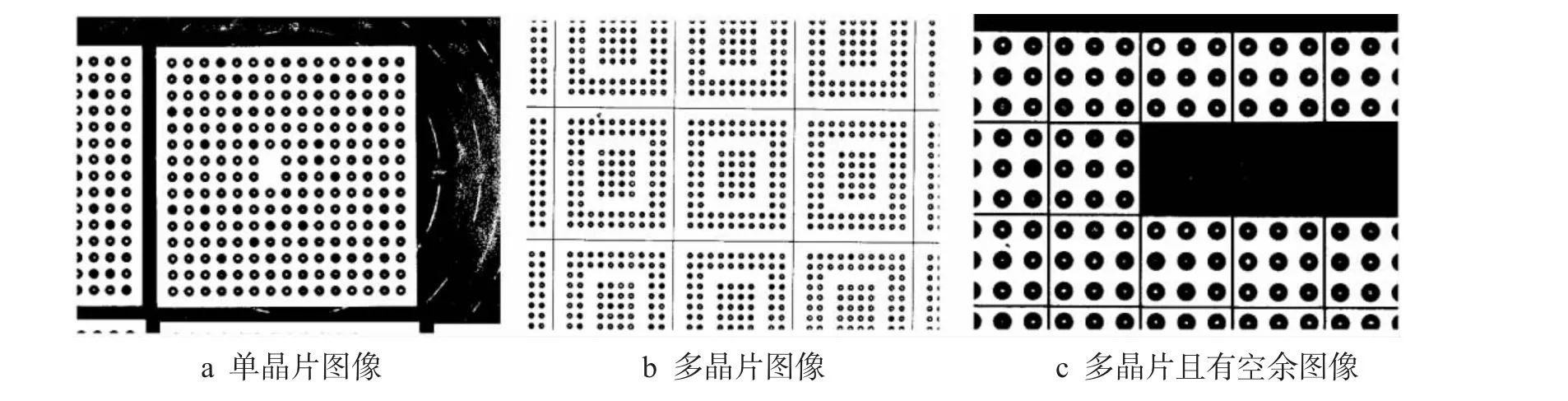
图9 晶片阈值分割图像Fig.9 Wafer threshold segmentation image
对视野内单个晶片、视野内多个晶片、视野内多个晶片且有空余利用Canny 算法提取像素级边缘如图10 所示.
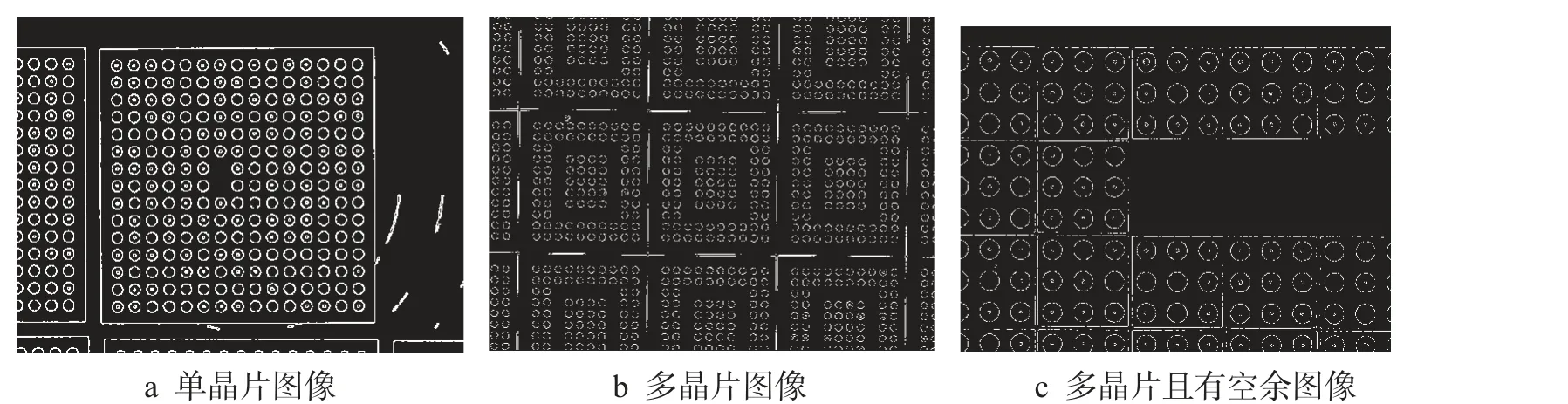
图10 Canny 算法提取的晶片像素级边缘Fig.10 Pixel-level edges ofwaferextracted by Canny algorithm
对视野内单个晶片、视野内多个晶片、视野内多个晶片且有空余利用Facet 曲面模型提取亚像素边缘,如图11 所示.
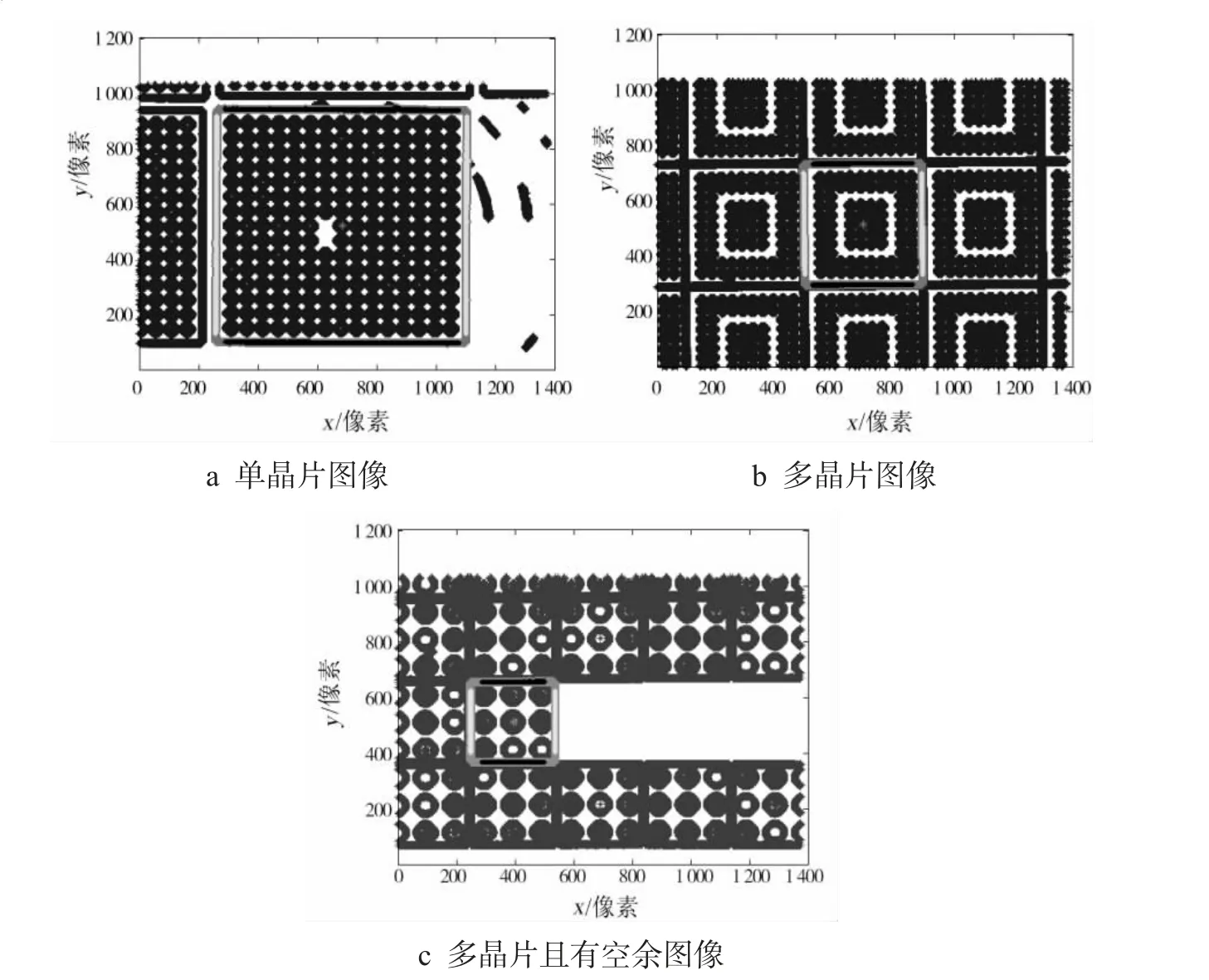
图11 晶片的Facet 亚像素边缘Fig.11 Facet sub-pixel edgesofwafer
图11 中的红色标记为距离中心最近的晶片边缘,黑色标记和绿色标记分别为晶片的横向边缘和纵向边缘,位于晶片内部的红色标记点为所求的晶片中心位置.
由图9、图10、图11 看出,采用本文提出的方法能够准确提取出不同情况下视野范围内的晶片边缘,得到各晶片的中心位置,求出各中心位置与图像中心位置的偏差,从而确定距离图像中心最近的晶片位置,并由该晶片的横向边缘和纵向边缘得到晶片的偏转角度.结果如表2 所示.
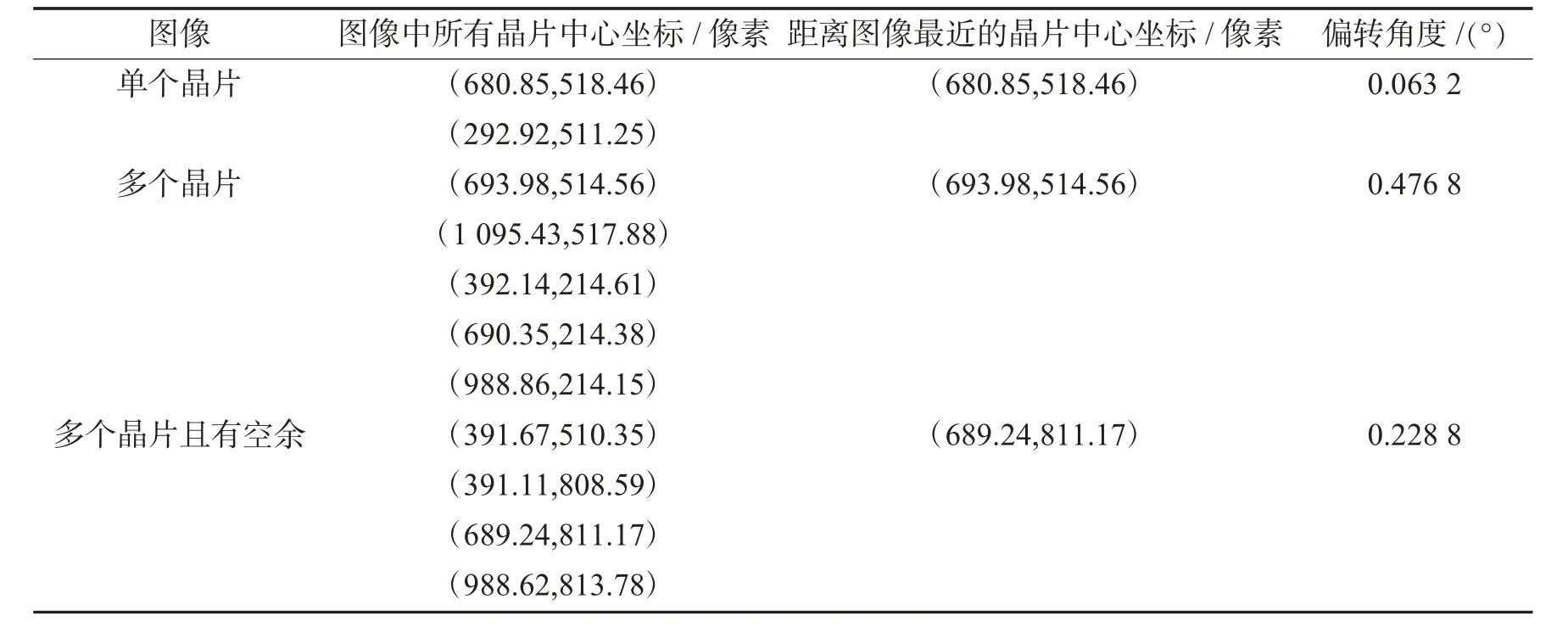
表2 晶片中心位置及偏转角度Tab.2 Wafer center position and deflection Angle
从上述结果可以看出,采用本文提出的方法能够实现各种晶片的检测,得到视野范围内距离图像中心最近的晶片中心位置及偏转角度,其中单个晶片的中心位置为(680.85,518.46),偏转角度为0.0632°;多个晶片中距离图像最近的晶片中心位置为(693.98,514.56),偏转角度为0.4768°;多个晶片且有空余中距离图像最近的晶片中心位置为(689.24,811.17),偏转角度为0.2288°;此外图像处理时间约200 ms,可满足生产线上对于机械手抓取晶片的要求.
4 小结
本文提出一种基于膨胀和Facet 算法的机器视觉精密测量方法. 首先对定位盘图像进行自适应阈值分割、Canny 粗边缘检测和Facet 亚像素边缘提取、最小二乘圆拟合等处理后得出中心位置,其中单圆定位盘的中心位置为(687.6732,518.2045),多圆定位盘的中心位置为(691.0811,507.8465).
在此基础上分别检测视野内单个晶片、多个晶片以及多个晶片且有空余的情况的中心位置,对于视野内多个晶片和多个晶片且有空余的情况运用连通域标记的方法来求出晶片个数和距离图像中心最近的晶片,求出它的中心位置和偏转角度.整个图像处理时间约200 ms,可满足生产线上对机械手抓取晶片的要求.
