神经网络实现线状工程GNSS高程转换
2022-06-10石晨阳张振威袁晓燕曹海迪
石晨阳,张振威,袁晓燕,柴 香,曹海迪
(重庆交通大学,重庆 400074)
0 引言
卫星导航定位技术的快速发展,使得全球卫星导航系统(global navigation satellite system, GNSS)技术在工程测绘中应用愈加广泛[1]。线状工程中需要将GNSS高程转化为正常高[2]。因此,需要利用合适的模型进行高程异常拟合,以解决线状工程GNSS高程转化问题。
国内外学者针对GNSS高程转换这一课题进行了大量研究。目前高程异常拟合方法主要有数学模型法[3-4]、地球重力场模型法[5-6]和神经网络方法[7-8]。神经网络能够以任意精度逼近任意连续函数及平方可积函数[9-10],在高程异常拟合中应用广泛。
本文以某线状工程为例,分别利用反向传播(back propagation, BP)神经网络、极限学习机(extreme learning machine, ELM)、径向基函数(radial basis function, RBF)神经网络、粒子群算法(particle swarm optimization, PSO)优化 BP(PSO-BP)神经网络和遗传模拟退火算法(genetic simulated annealing, GSA)优化BP(GSA-BP)神经网络进行高程异常拟合,并对结果进行精度统计和分析,比较各种神经网络算法的优缺点及适用性。
1 方法与基本原理
1.1 反向传播(BP)神经网络算法
BP神经网络的训练模式是误差反向传播,它的输入层和输出层为一层,隐含层是大于或等于一层。各层之间的权值和阈值由初始化随机得出,通过反复训练得到最优的权值和阈值。其具体网络结构如图1所示。

图1 BP神经网络示意
算法步骤[11]如下:
1)置各权值和阈值的初始值。wji(0)、θj(0)为小的随机数值。
2)提供训练样本。输入矢量Xk,k=1,2,…,p;期望输出dk,k=1,2,…,p;对每个输入样本进行下面步骤3)至步骤5)的迭代。
3)计算网络的实际输出及隐含层的状态为

4)计算训练误差为

5)修正权值和阈值为

6)当k每经历1至p后,判断指标E是否满足精度要求,即

式中,ε为预设的精度。
7)若满足式(6),则结束,否则返回到步骤3)。
以平面坐标作为输入层,高程异常值作为输出层,隐含层数设置为1,对训练集进行高程异常拟合训练,得到最优权值和阈值再进行对测试集进行预测。
1.2 极限学习机(ELM)算法
ELM 是一种单层前馈神经网络,它的训练方法与BP神经网络相同。针对BP神经网络反复迭代巨大的运算量,ELM将隐含层与输出层之间的连接权值,通过对训练结果进行最小二乘运算,而一次性确定,极大地提高了运算速率[12]。
1.3 径向基函数(RBF)神经网络算法
RBF神经网络与 BP神经网络最大的不同就是使用径向基函数作为激活函数,函数的自变量为输入模式与中心向量的距离。RBF神经网络可以处理很复杂的非线性问题,学习速度很快[13]。
1.4 粒子群(PSO)优化BP算法
粒子群优化(PSO)BP神经网络是将粒子群融到BP神经网络中。以BP算法的权值作为粒子群粒子的位置向量并进行初始化,以均方差最小作为寻优目标进行寻优,求得的全局最优解作为BP算法的权值和阈值,进行训练[14]。
1.5 遗传模拟退火(GSA)优化BP算法
遗传模拟退火优化BP神经网络是将遗传算法和模拟退火算法融到BP神经网络中。在寻优过程中,首先寻得一组可行解并保持一组解,最优解被接受,非最优解根据算法需要也可能被接受并重新组合,不断迭代更新直至得到最优解,然后进行训练。其具体流程图如图2所示。

图2 GSA-BP算法流程
2 实验分析
2.1 实验数据介绍
本文以某高速公路GNSS/水准数据为例。该线状工程共约87 km,43个GNSS点全部进行了四等水准联测。点位分布较为均匀,地形较为平坦,正常高最大值为409.5 m,最小值为193.3 m,平均值为275.5 m。具体点位分布和沿线高程异常起伏情况如图3、图4所示。

图3 GNSS/水准点分布

图4 沿线高程异常起伏情况
2.2 实验结果及分析
用该线状工程43组GNSS/水准数据根据不同训练集和测试集点数分别设计 6种方案,具体方案见表1。

表1 训练方案 单位:个
根据以上 6种方案,分别利用 5种神经网络算法进行高程异常拟合,并对结果进行统计分析。测试集高程异常拟合结果见图5,拟合精度见表2和图6。精度计算公式为

图6 各方案拟合精度统计

表2 各方案拟合精度统计 单位:mm


图5 各方案高程异常拟合结果对比
从表2和图5可知,在6种方案中,GSA-BP精度分别为 15.3、15.1、15.1、14.9、14.8及14.7 mm,相差不大且始终同组最高,说明GSA-BP算法拟合效果最优;在6种方案中,5种神经网络算法精度互差最大值依次为 13.6、9.7、5.8、3.4、1.6及 1.1 mm,GSA-BP相比 BP精度依次提高47.0%、38.9%、27.7%、18.6%、10.0%、6.7%,说明随着训练集点数的增多,5种神经网络算法的精度愈加接近,且均能获得较高精度;在6种方案中,ELM、RBF、PSO-BP精度接近,精度相比BP分别至少提升38.8%、28.0%、16.2%、8.0%、0、1.7%,说明这3种算法相比BP算法拟合效果更优。
为进一步比较5种神经网络算法的适用性,现将 6种方案中满足四等水准测量限差的点数进行统计,结果见图7。
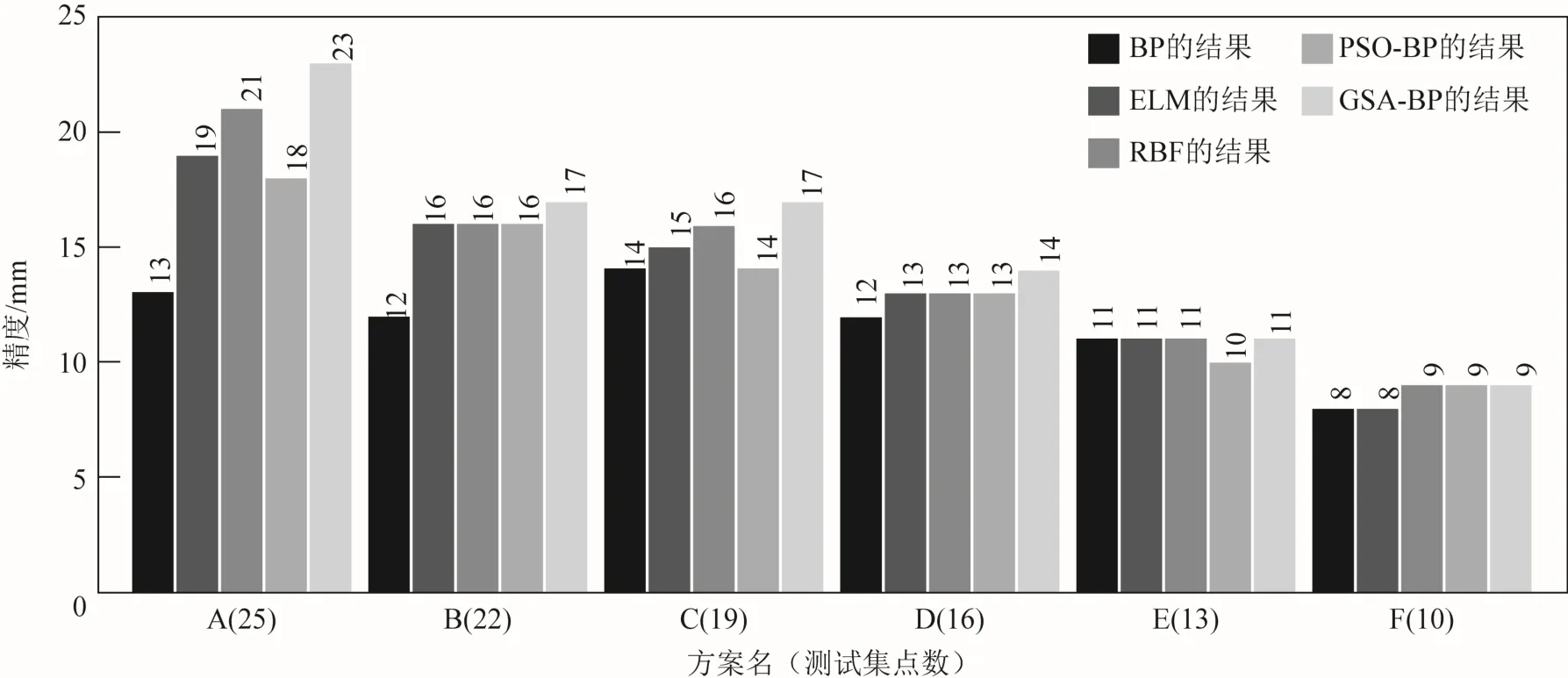
图7 各方案满足四等水准限差统计
其中,四等水准测量限差为

由图7可知:在6种方案中,GSA-BP满足四等水准测量的点数分别为 23、17、17、14、11、9,始终最多,接近测试集点数,说明GSA-BP适用性最高;在6种方案中,ELM、RBF、PSO-BP满足四等水准测量的点数接近GSA-BP,这3种算法能基本满足四等水准测量要求。
3 结束语
本文以某线状工程为例,利用BP、ELM、RBF、PSO-BP、GSA-BP五种神经网络算法在 6种方案下进行 GNSS高程转换,比较 5种算法的精度和适用性。可得如下结论:
1)在训练集点数较多时,5种神经网络算法均能获得较高精度;
2)ELM、RBF、PSO-BP拟合效果更优,且能满足四等水准要求;
3)GSA-BP效果最优,在线状工程 GNSS转换中具有可行性。
