水下航行器仿生非光滑表面减阻特性
2022-06-10唐俊刘岩岩闫一天
唐俊, 刘岩岩, 闫一天
(天津大学 建筑工程学院, 天津 300354)
0 引言
研究表明,若水下航行器的航行阻力能够减少10%,则在相同动力和能源条件下,其巡航速度和航程可以同时提高约3.57%,因此减阻设计是减少能源消耗和提高航行器性能的关键技术。对于潜艇等水下航行器,其所受摩擦阻力占比可高达70%,因此研究能够降低摩擦阻力的湍流减阻技术,对于节约能源和制造高性能的航行器具有重大意义。
仿生非光滑表面减阻技术通过改变流场中物体的表面结构或特性引起流场的变化,影响边界层内湍流结构的演化,从而降低物体表面摩擦阻力,是湍流减阻技术研究的重要方向。仿生非光滑表面减阻技术的灵感来源于自然界中的生物结构,如鲨鱼皮表面的盾鳞微结构、蜣螂表面的凹坑结构和贝壳表面的沟槽纹理等,具有可设计性强、无需额外的动力设备、环保等优点,众多国内外研究人员基于仿生非光滑表面开展了减阻技术研究。
Walsh首先进行了沟槽平板湍流减阻研究,发现顺流向的沟槽可以减少阻力。Bechert等通过研究不同形状和尺寸的顺流向沟槽结构,发现V形沟槽具有最好的减阻效果。Martin等比较了3种不同尺寸脊状结构的阻力特性和湍流结构,获取了脊状结构的最佳参数。研究表明仿生非光滑表面可以有效降低湍流阻力,研究成果已应用于诸多工程领域,例如仿生蜣螂表面结构设计的推土板、鲨鱼皮微结构设计的泳衣、应用浅球状凹坑设计的高尔夫球、飞机表面的非光滑覆膜等。
对于水下航行器,由于经常被海洋生物附着,导致其表面的微小减阻结构失效。因此需要水下航行器表面具有较大尺度的非光滑减阻结构,以最大限度地减少海洋生物附着的影响。齿鲸亚目类动物在海洋中的游速较快,其皮肤组织结构具有许多有效的减阻特征,是众多仿生减阻研究的灵感来源。
本文应用仿生学原理,基于虎鲸皮肤嵴结构的减阻特征设计了一种新型的大尺度水下航行器仿生非光滑表面。与虎鲸皮肤表面的微观结构相比,该仿生表面结构具有更大的几何尺度和优良的减阻性能。本文重点研究新型仿生表面的减阻性能,使用平板模型分析仿生结构对湍流摩擦阻力的减阻机理,并将新型仿生表面进一步应用到无附体SUBOFF潜艇上,研究新型仿生表面是否适用于复杂的航行器模型,并验证新型仿生非光滑表面的减阻效果和减阻机理。
1 结构仿生与数值模拟
1.1 仿生非光滑表面模型设计
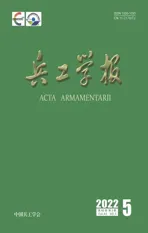
虎鲸等齿鲸亚目类动物的表皮并不光滑,身体大部分区域的皮肤表面分布着波纹状的规则沟嵴,这种结构被称为皮肤嵴或微褶皱。根据组织切片和环氧树脂模具的显微镜测量,发现齿鲸亚目类动物的皮肤嵴相邻峰间距为0.41~2.35 mm,嵴的高度为7~112 μm。其中虎鲸的皮肤嵴在皮肤表面近乎垂直于流向分布,分析发现其截面形状类似于随行波,如图1所示。
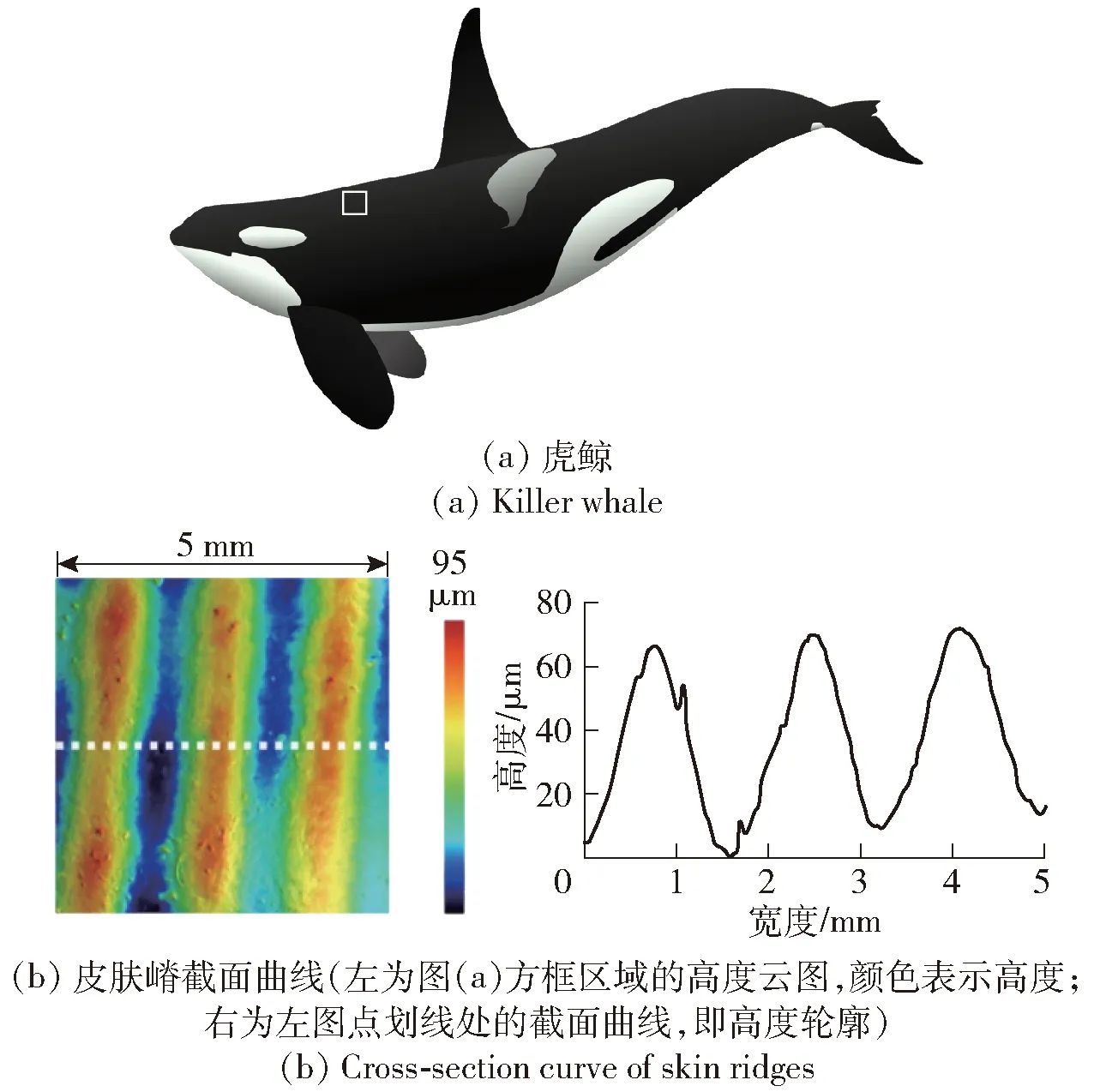
图1 虎鲸的皮肤嵴结构Fig.1 Skin ridges of killer whale
虎鲸皮肤嵴属于微结构,尺度较小,直接使用皮肤嵴结构实现水中航行器减阻难度很大,加工难度高,而且容易被生物附着后遭到破坏。本文根据虎鲸皮肤嵴形状特征,依据仿生学原理对皮肤嵴截面进行适当放大设计。根据水中航行器表面工程设计需求,研究了一种新型仿生非光滑表面。该仿生表面使用11个控制点拟合虎鲸皮肤嵴形态的截面曲线,采用三次样条插值方法生成,如图2所示。图2中,表示仿生非光滑单元的深度,表示仿生非光滑单元的宽度,并用表示仿生非光滑单元的宽深比,=。

图2 仿生表面截面曲线Fig.2 Cross section curve of a bionic non-smooth surface
1.2 非光滑表面平板仿真模型
为研究新型仿生非光滑表面的减阻效果,基于平板模型建立图3所示方形管道作为计算域,计算域的坐标轴位于仿生非光滑表面最前端,轴方向为来流方向,轴方向为下表面法向,轴方向为下表面展向。计算域的长度(轴方向)为2 m,高度(轴方向)和宽度(轴方向)为02 m,上表面(=02 m处)为光滑表面,下表面为非光滑表面。上、下表面的边界条件统一设置为固定壁面,左、右表面(=-04 m和=16 m处)边界条件分别设置为速度入口和压力出口,前、后表面(=0 m和=02 m处)的边界条件为对称壁面。
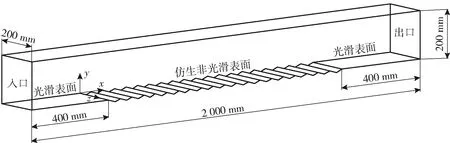
图3 非光滑表面计算域模型Fig.3 Computational domain model of a non-smooth surface
由图3可见:计算域的下表面由三部分组成,中间为仿生非光滑表面,横向的仿生结构沿垂直于水流方向(轴方向)排列,坐标=0 m与=-分别对应仿生结构的波峰与波谷,仿生非光滑表面区域总长度为12 m,用以研究仿生表面的减阻机理和减阻效果;仿生表面前后与光滑表面连接,前面的光滑表面使流动更加稳定,后面的光滑平面用以研究仿生表面对后续流场的影响。
仿生非光滑表面通过干扰近壁面边界层内的流动来降低湍流摩擦阻力,因此仿生表面的深度应小于边界层的厚度。随着来流速度的增加,平板的边界层厚度会逐渐减少,通过平板湍流边界层公式((1)式、(2)式)计算最大来流速度条件下平板在仿生非光滑表面对应区域的边界层厚度如下:

(1)

(2)
式中:()为距离平面最前端处的雷诺数;()为距离平面最前端处边界层的厚度;为水的密度,=9982 kg/m;为来流速度;为水的动力黏度,=0001 003。
仿真计算的最大来流速度为15 m/s。表1给出了由(1)式和(2)式计算得到的平板不同位置湍流边界层厚度。故仿生非光滑表面的深度尺寸应该满足≤65 mm。计算域上下表面间距大于仿生非光滑表面深度的20倍,可以避免光滑表面和非光滑表面的相互影响,提高计算精度。

表1 光滑平板湍流边界层厚度Tab.1 Turbulent boundary layer thickness of smooth surface
1.3 数值模拟方法
采用雷诺平均法进行湍流的模拟计算,流体为不可压缩流体,计算过程中流体的密度和动力黏度等参数保持不变,不考虑热效应。
选择压力耦合方程组的半隐式求解算法,压力项选择标准离散格式,动量及湍流输运方程采用2阶迎风格式离散。湍流模型使用SST-(为湍流动能,为湍动能比耗散率)模型,该模型对于模拟近壁区绕流和旋流、逆压梯度流动、转捩等方面具有更高的精度。SST-模型的控制方程为

(3)
(4)
式中:、分别为轴和轴方向的坐标;为轴方向的速度分量;为湍流黏性系数;和分别为平均速度梯度和湍流比耗散率方程产生的湍动能;和分别代表与的湍流普朗特常数;和为相关源项;与分别代表与的发散项;为湍流交叉项。

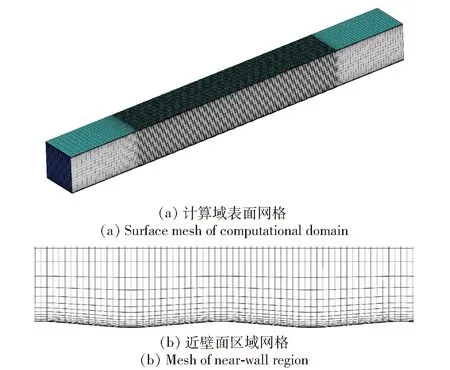
图4 网格划分Fig.4 Mesh division
为避免网格数量对计算结果造成影响,针对来流速度05 m/s、50 m/s和100 m/s进行网格独立性验证。结果表明:当网格数量增加至997 484时,计算域上下表面的摩擦阻力随网格数量增加基本不变;采用此种网格密度计算不同流速条件下光滑表面的湍流摩擦阻力系数(见表2),可知仿真结果与理论公式(=0074()15)计算结果误差均在±2以内,保证了计算结果的可靠性。

表2 光滑平板湍流摩擦阻力系数Tab.2 Skin friction coefficient of smooth surface ×10-3
2 平板模型仿真与分析
2.1 数值仿真
本文研究了05~15 m/s速度范围内仿生非光滑表面的减阻效果,仿生非光滑表面在降低摩擦阻力的同时,会不可避免地产生沿流向的压差阻力,非光滑表面总阻力可能会增加。因此基于前期的研究,对非光滑表面参数进行优化,并选取表3所示8种模型方案进行数值仿真。

表3 仿生非光滑表面形状参数Tab.3 Parameters of bionic non-smooth surface
使用12节和13节方法分别计算8种非光滑表面模型的摩擦阻力和总阻力,则非光滑表面摩擦阻力减阻率和总阻力减阻率为

(5)

(6)
式中:为光滑表面的摩擦阻力;为光滑表面的总阻力。
图5和图6分别给出了仿生非光滑表面摩擦阻力和总阻力减阻率的数值仿真结果。从图5和图6中可以看出,仿生非光滑表面具有良好的减阻性能,其中模型方案8在08 m/s速度条件下,最大摩擦阻力减阻率为1835,最大总阻力减阻率为757。

图5 非光滑表面摩擦阻力减阻率 Fig.5 Skin friction drag reduction ratio of non-smooth surfaces

图6 非光滑表面总阻力减阻率Fig.6 Total drag reduction ratio of non-smooth surfaces
对比分析8种模型方案的减阻结果可以看出:随着来流速度增加,非光滑表面的摩擦阻力减阻率呈平缓的下降趋势;在05~150 m/s来流速度范围内,8种模型方案均能有效降低摩擦阻力和总阻力,摩擦阻力减阻率>9,总阻力减阻率>4。仿真结果表明,选择合适的宽深比参数,仿生非光滑表面可以通过降低表面摩擦阻力的方式,降低平板模型表面总阻力。该新型仿生非光滑表面的适用范围受来流速度的限制较小,在较大速度范围内均能取得较好的减阻效果。
2.2 仿生非光滑表面减阻机理分析
湍流高摩擦阻力的产生与近壁面湍流边界层中相干结构的猝发有着密切的关系,因此维持近壁面湍流流动的稳定,减少湍流边界层内的速度梯度,有助于减少湍流摩擦阻力。由于模型方案8在08 m/s速度条件下取得最好的减阻效果,以方案8为例,从表面切应力、边界层厚度和湍流统计量等方面分析仿生非光滑表面的湍流减阻机理。
221 速度场分析
获取中间横截面位置的流场速度云图来分析仿生表面对流场的影响(见图7(a)),并将光滑表面和非光滑表面的近壁面区域(区域1和区域2)的速度云图放大(见图7(b))。观察速度云图可以发现,因为流体的黏性作用,在靠近壁面的位置会出现速度梯度差,且沿着流动方向,边界层厚度逐渐增加。

图7 速度云图Fig.7 Velocity contour
对比区域1和区域2处的云图发现:相对于光滑表面,仿生非光滑表面可以增加近壁面湍流边界层的厚度;非光滑单元的存在,使得近壁面边界层底层厚度相比光滑壁面增加,减少了表面的速度梯度,从而降低了表面摩擦阻力。
基于图8所示非光滑表面区域的速度矢量图,进一步分析非光滑单元内部具体的流动情况。从图8中可以看到:当流体流经非光滑单元内部时,流向发生改变,产生轴方向速度分量,流速逐渐降低,在非光滑单元内部汇聚形成低速流体,低流速区域逐渐扩大;这些低速流体可以起到类似于润滑剂的作用,高速流体从充当润滑剂的低速流体上方流过,使流体与物体表面之间的液体与固体摩擦转化为液体与液体之间的摩擦。与光滑表面相比,非光滑表面可显著降低摩擦阻力。

图8 非光滑表面速度矢量图Fig.8 Velocity vectors for non-smooth surface
222 湍流强度和表面切应力分析
为分析非光滑单元对近壁面边界层内湍流统计量的影响,分别提取距离光滑表面和非光滑表面0005 m处平面的湍流强度值进行分析,如图9所示。由图9可见:在前端区域,曲线差异性较小,湍流强度近似;在仿生非光滑表面区域,相同的非光滑单元会对近壁面流场进行重复的扰动,使得流场的湍流强度降低,表明非光滑单元能够有效地提高流体运动的稳定性,抑制湍流猝发,从而降低湍流摩擦阻力。对比曲线尾部发现,仿生非光滑表面还能够降低周围流场的湍流强度,整体上降低了湍流摩擦阻力。

图9 湍流强度曲线 Fig.9 Curves of turbulence intensity
表面摩擦阻力的大小可以由表面切应力的大小表征,图10所示为光滑表面和非光滑表面在相应区域(区域1和区域2)的表面切应力曲线,使用仿生单元宽度对横坐标无量纲化。
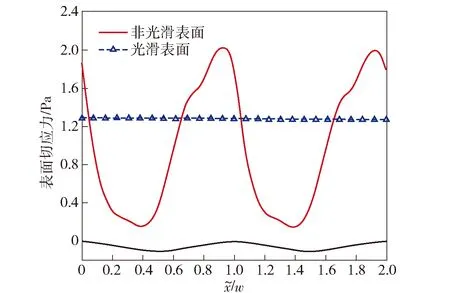
图10 切应力曲线Fig.10 Curves of shear stress
图10表明,非光滑表面切应力曲线呈周期性变化,与波形起伏不完全同步,与光滑表面相比,波谷处切应力减少,波峰处切应力增加,导致非光滑表面的切应力云图(见图11)呈现条纹状周期性变化;单个仿生非光滑单元能够降低表面切应力,非光滑表面的整体切应力明显小于光滑表面,因此仿生非光滑表面具有降低摩擦阻力的作用。
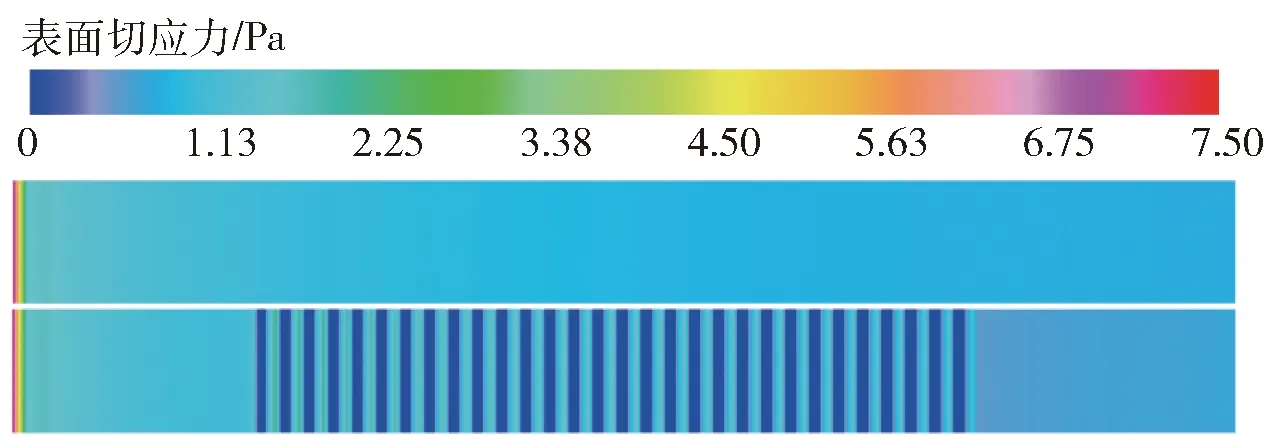
图11 光滑表面(上)与非光滑表面(下)切应力云图Fig.11 Shear stress contours of smooth (up) and non-smooth (below) surfaces
3 SUBOFF潜艇减阻设计
采用图12(a)所示无附体SUBOFF潜艇标准模型,进一步研究该新兴仿生非光滑表面的结构适用性,讨论水下结构外形对减阻表面影响,验证仿生非光滑表面的减阻性能。SUBOFF潜艇标准模型总长4356 m,平行中体长2229 m,最大直径0508 m,具有较好的水动力特性。SUBOFF潜艇标准模型平行中体处的流场与平板模型近似,应用表3中模型方案8在SUBOFF潜艇模型的圆柱中段部分设计非光滑敷设表面,如图12(b)所示。

图12 潜艇模型Fig.12 Submarine models
整个流场计算域为:来流方向艇首取1倍艇长,艇尾取2倍艇长,径向取2倍艇长。采用六面体网格离散计算域,第1层网格高度满足+接近1,并加密了潜艇平行中体区域,艇体表面网格如图13所示。来流速度设为3045~8231 m/s,湍流模型采用SST-模型,动量及湍流输运方程采用2阶迎风格式离散。无附体SUBOFF潜艇标准模型总阻力的仿真计算值(见表4)与实验数值(见表5)相比较,误差在±1以内,可以保证计算的精确性。

图13 潜艇表面网格Fig.13 Surface mesh of submarine
光滑表面和非光滑表面的SUBOFF潜艇阻力的数值仿真结果如表4所示。从表4中可以看出:仿生非光滑表面能够大幅降低潜艇表面摩擦阻力和总阻力,具有非常好的减阻效果;在3045~8231 m/s的速度范围内,仿生非光滑表面的摩擦阻力减阻率大于185,虽然非光滑表面敷设模型的压差阻力
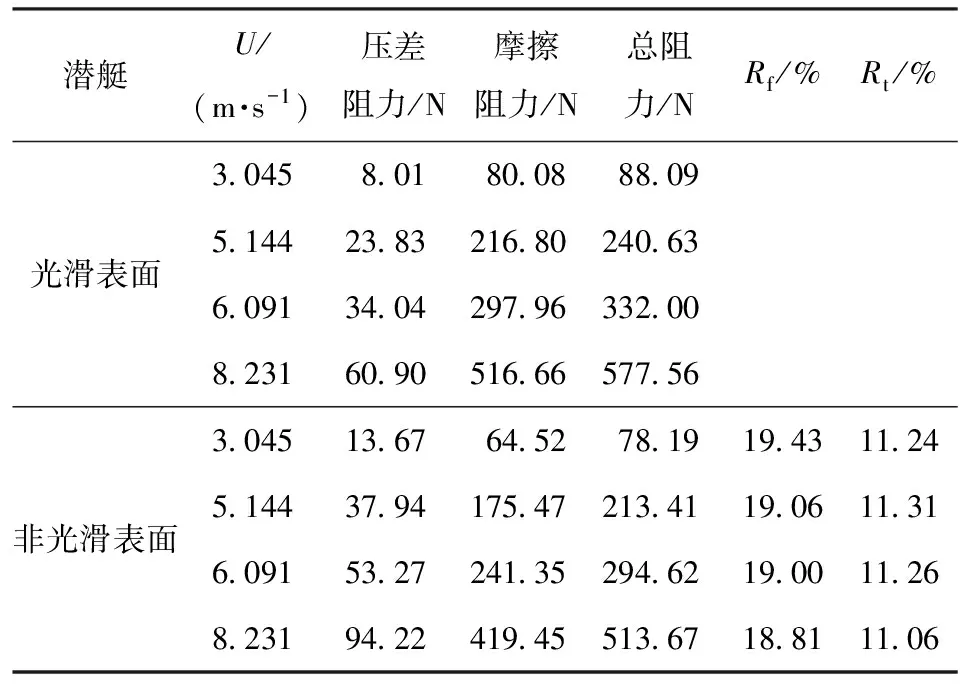
表4 无附体SUBOFF潜艇的数值模拟结果Tab.4 Numerically simulated results of SUBOFF submarinewithout appendage

表5 无附体SUBOFF潜艇实验数据Tab.5 Experimental results of SUBOFF submarinewithout appendage
有所增加,但是总阻力减阻率仍然大于11。表明仿生非光滑表面不仅适用于平板模型,也适用于结构更加复杂的潜艇模型。
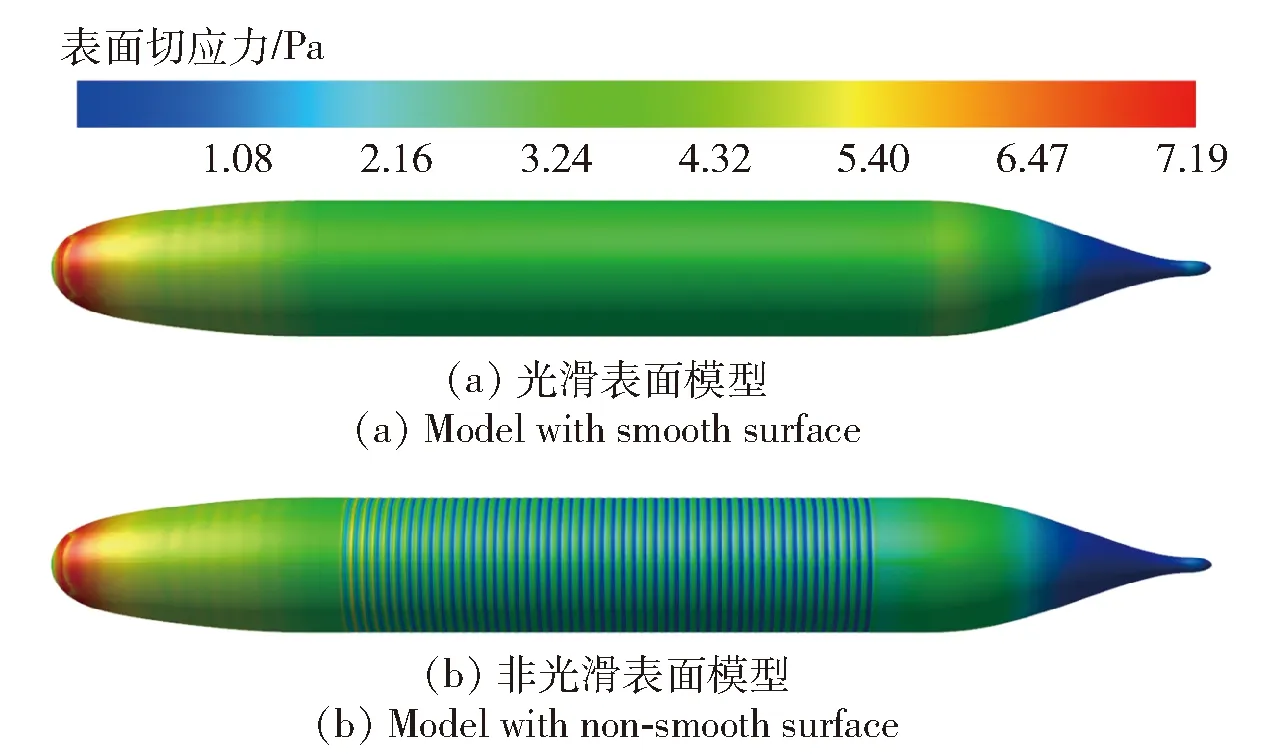
图14 潜艇模型表面切应力云图Fig.14 Shear stress contours on the surfaces of submarines
图14所示为SUBOFF潜艇模型表面切应力云图。分析图14可知:非光滑表面潜艇模型平行中体处表面切应力呈条纹状周期性变化,与非光滑平板模型一致,验证了减阻机理;与光滑表面SUBOFF模型相比,非光滑表面模型部分区域的切应力显著降低,整体上降低了潜艇表面切应力,从而达到减少表面摩擦阻力的目的。需要特别指出的是,除上述模型减阻设计方案外,应用表3中列出的其余非光滑表面参数模型方案对SUBOFF潜艇进行减阻设计,均取得了一定的减阻效果。
4 结论与展望
本文基于虎鲸皮肤嵴截面形状与减阻效能,应用仿生学原理设计了一种新型非光滑表面,并针对光滑平板和SUBOFF潜艇进行了减阻设计。所得主要结论如下:
1) 应用非光滑表面的平板模型在08 m/s速度条件下取得757的最大总阻力减阻率;同时布置了非光滑结构的SUBOFF潜艇在3045~8231 m/s速度范围内总阻力均能减少10以上,新型非光滑表面减阻性能受来流速度限制较小。
2) 非光滑表面的深度和宽度是影响减阻性能的直接参数,只有合适的深度和宽深比,才能在减少表面摩擦阻力的基础上降低总阻力。
3) 非光滑单元能够增加边界层底层的厚度,从而降低速度梯度。
4) 非光滑单元内部汇聚的低速流体能够起到类似于润滑剂的作用,将流体与物体表面的摩擦转换为液体与液体之间的摩擦。
5) 非光滑表面能够对近壁面流场进行规则扰动,使得湍流强度降低,流动更加稳定。
6) 新型仿生非光滑表面结构简单、尺寸较大,具备用于复杂潜艇表面减阻设计的工程适应性。同时该减阻表面还可广泛应用于水面和水下航行器,为制造高性能的航行器和节约能源提供新的技术手段。