安全约束下的空间翻滚目标涡流消旋稳定控制
2022-06-10刘习尧常海涛黄攀峰黄冰潇翟晨萌
刘习尧,常海涛,黄攀峰,黄冰潇,翟晨萌
(1. 西北工业大学航天飞行动力学技术重点实验室,西安 710072;2. 西北工业大学智能机器人研究中心,西安 710072)
0 引 言
欧洲航天局(ESA)最近的报告指出,过去60年来,人类进行了约6110次太空发射任务,且产生了约29410个有记录的空间碎片。质量越大的碎片,碰撞危害越大,对现存的工作卫星的威胁也越大。事实上,在诸多空间碎片中,失效卫星和废弃火箭体等大型碎片的质量占空间在轨物体总质量的90%以上。主动移除这些大型碎片可以大大降低空间碰撞发生的可能性。
目前,稳定或低速旋转空间碎片的主动移除方法主要有:空间机械臂、空间绳系机器人和空间绳网机器人等。然而,根据光学和雷达观测结果,非受控三轴稳定卫星的旋转周期为20~430 s(即最大18 (°)/s),废弃运载火箭旋转周期为5~15 s(即最大72 (°)/s)。因此,捕获并移除这类高速翻滚旋转目标前必须有效降低其旋转角速度,即消旋。
针对消旋问题,学者们提出了多种接触或非接触式的消旋方法,如机械脉冲消旋、柔性毛刷消旋、库仑力消旋、气体冲击消旋、涡流消旋等。考虑到非接触式消旋中的涡流消旋在安全性和可持续性等方面的优势,本文主要针对涡流消旋方法开展研究。石永康等详细阐述了涡流消旋的基本原理及概念,并针对各种典型目标进行了涡流消旋动力学仿真研究,分析了涡流消旋技术的可行性。Li等提出了一种适用于任意形状和非均匀磁场的涡流消旋力矩计算方法,并进行了地面实验验证。Liu等提出了一种基于永磁体阵列的涡流消旋方式,并在平均半径假设下,建立了用于计算涡流消旋力和力矩的理论模型。Xie等采用双机械臂调整永磁阵列装置的转速和姿态,进行了涡流消旋仿真分析。目前国内外空间目标涡流消旋的研究主要集中在涡流消旋机理及地面实验方面,对涡流消旋任务中制导、导航与控制(Guidance,navigation and control, GNC)系统的研究较少。
涡流消旋任务的GNC系统需保证任务周期内服务星不与目标发生碰撞,并调整星载磁体与目标之间的相对位姿以提升消旋效率。针对涡流消旋任务的GNC系统设计问题,Gómez等提出了控制模块以及传感器模块的主要要求,并设计了两种基本的消旋构型(线圈磁偶极子与相对位置矢量平行的平行构型(‖)以及两者垂直的垂直构型(⊥)),最终采用最优控制方法实现了目标的消旋。但为了保证操作过程的安全,文献[16]采用了较大的相对距离(10 m),这使得消旋效率大大降低,其仿真结果表明,消旋任务执行周期约15天。事实上,在垂直构型的基础上,通过设计抵近的空间消旋期望轨迹及其跟踪控制器,可以大大缩短消旋时长、提高消旋效率。
综上,本文面向空间翻滚目标的消旋任务设计了近距离消旋轨迹及其轨迹跟踪控制器,其主要研究贡献在于:基于椭球包络法给出了服务星的机动区域安全约束,并使用直接线性化方法对安全区域约束进行了凸化处理,确保了最优轨迹跟踪问题的有限时间可解性;设计了一种基于垂直消旋构型的高效的抵近消旋轨迹,在满足安全性的条件下有效增强了消旋力矩的作用强度,提高了消旋效率;基于反馈线性化和收缩约束方法,设计了一种指数稳定的模型预测控制算法,并严格保证了受约束被控系统的稳定性。
1 问题提出
本文的主要目的是在保证安全的情况下提高涡流消旋的效率。本文的任务情景与Gómez等一致,即通过一个携带超导磁体的服务卫星(简称服务星)抵至目标附近,并对目标进行消旋,其场景和坐标系定义如图1所示。坐标系定义如下:

图1 任务场景和坐标系定义Fig.1 Task scenario and definition of coordinate frames


此外,为区分各个空间矢量在不同坐标系下的坐标表示,对矢量标记做如下定义:对于任一矢量,为矢量在坐标系下的坐标表示;空间矢量在,,系下的坐标表示同理。
2 模型和约束
2.1 相对位置动力学模型
根据坐标系的选择不同,描述航天器之间相对运动的基准坐标系有许多种,如局部垂直局部地平线(LVLH)系,视线(LOS)坐标系,服务星本体坐标系,目标本体坐标系等。考虑到消旋作用力和力矩在上述坐标系下不便于描述,因此相对位置坐标系选为系,此时位置动力学模型为:

(1)



(2)

(3)


(4)
2.2 姿态动力学模型
由于本文中服务星和目标都存在大角度变化,因此采用四元数描述两者的姿态动力学模型。本体姿态动力学模型为
(5)
目标姿态动力学模型为

(6)


(7)


(8)
式中:是从系到系的方向余弦矩阵。
2.3 安全约束与期望轨迹
椭球包络是一种典型的航天器安全约束形式。然而,椭球包络安全约束是非凸的,这使得优化问题难以求解。因此需对安全约束进行凸化处理,以保证问题有限时间内可解。考虑到目标是翻滚的,直接线性化的方法更适用于安全约束的凸化。图2描述了安全约束的构造及其直接线性凸化处理。
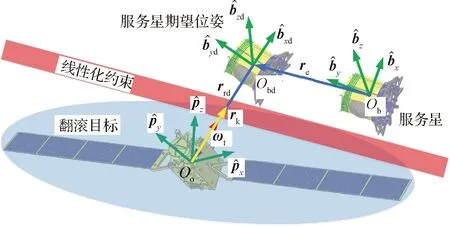
图2 安全约束及其凸化处理示意图Fig.2 Schematic diagram of safety constraints and their convexity processing

(9)


(10)


(11)


(12)
由上文可知,期望轨迹需要满足两个条件:① 满足安全约束的条件;② 保证垂直构型的条件。
对于条件 ①,取期望位置为
(13)
式中:=+,为正数。>保证了期望位置处于安全约束内。
(14)
则方向余弦矩阵为

(15)

为了保证控制器跟踪轨迹的连续性和简易性,期望轨迹的高阶导数由下列二阶动态系统计算:

(16)

2.4 状态模型和总约束
为了便于控制器的设计,将轨迹跟踪问题转化为镇定问题。
定义状态变量为


(17)
式中:

(18)
则可以得到状态模型为
(19)

将式(18)代入式(12)中,可得位置误差的安全约束为

(20)
在整个消旋过程中,除了安全约束外,本文还考虑了如下状态的上下界约束:
∈={|≤≤}
(21)
所以总的状态约束为
∈=∩
(22)
3 控制器设计
模型预测控制(Model predictive control, MPC)是一种滚动求解有限时域最优问题的控制算法,能够显式地处理约束并确保最优性能。考虑到安全约束和燃料消耗的要求,MPC算法非常适合于消旋任务。
由于消旋任务的动力学模型是非线性的,如果直接使用MPC算法,需要在线求解非线性规划问题。这将大大增加算法的计算量,不易实现。因此,有必要对模型进行线性化。目前的线性化方法主要有雅可比线性化和反馈线性化。雅可比线性化在系统轨迹接近平衡点时有效。考虑到消旋任务涉及到大范围机动,反馈线性化方法能提供更好的控制效果。此外,为了保证系统的稳定性,收缩约束被用于保证系统的指数收敛和稳定性,同时块优化的策略被用于进一步降低了MPC算法的计算量。本文采用的涡流消旋控制系统框图如图3所示。
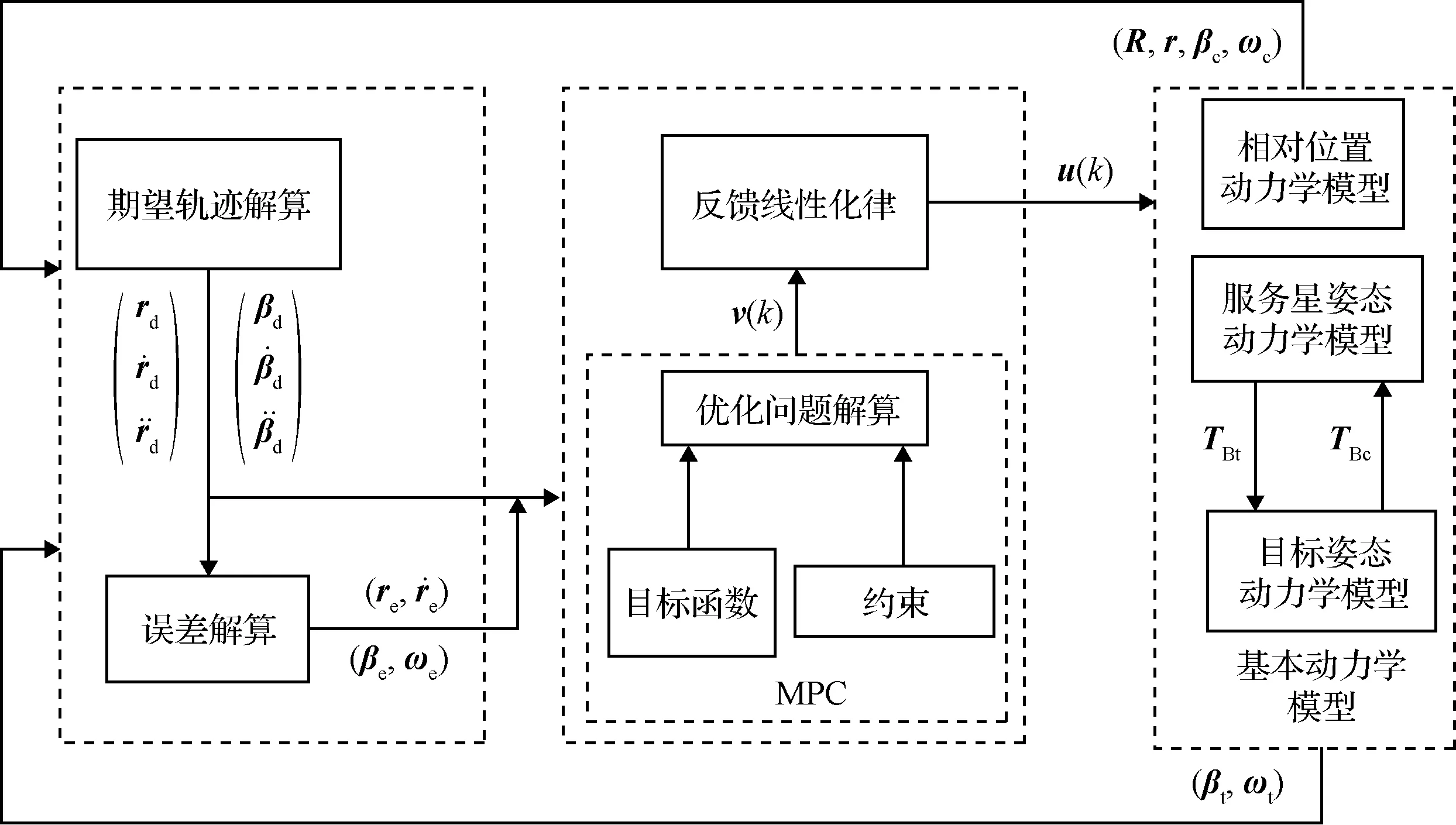
图3 涡流消旋控制系统框图Fig.3 Control framework of eddy current detumbling
3.1 反馈线性化
上述消旋过程的状态模型具有相伴形式。对于这种类型的系统,通过下式可直接消除系统的非线性:

(23)
假设系统姿态误差处于小范围内,不妨令=。因此,反馈线性化控制律和实际控制律之间的关系可化为
=+()
(24)
式中:
(25)
将式(18)代入式(12)后,可得
(26)
式中:
(27)
反馈线性化可以将系统状态模型转换为线性模型,但是系统的目标函数、控制约束也会产生相应的转换,从而可能变成非线性。因此需对转换后的目标函数、控制约束进行处理。
Primbs等对目标函数的非线性问题进行了讨论,给出了二次型目标函数和原始目标函数两种方式,本文基于计算量的考虑,选择时刻的目标函数为:


(28)
对于控制约束非线性问题,Simon等提出了两种处理方法:①整个时域内采用全局内部近似;②当前时刻采用精确约束,未来时刻使用递推内部多面体近似。当约束的非线性很强时,第二种方法可以大大提高系统的可行域。然而,第二种方法也使得算法更加复杂,增加了计算量。考虑到消旋任务的实际情况,本文采用了方法1处理控制约束。此时,控制约束集转换为
={|+max∈(,,,)≤≤
+min∈(,,,)}
(29)
式中:和分别为实际控制约束的上下界。
3.2 收缩约束MPC
经典MPC算法不能确保系统的稳定性。目前,有三种保证MPC算法稳定性的途径:
1)足够长的预测时域;
2)终端域和终端惩罚;
3)收缩约束。
显然使用足够长的预测时域将增加计算负担,而终端域和终端惩罚在一般情况下是难以计算的。此外,在消旋任务中,状态约束是时变的,这意味着需要在每个采样时刻计算终端域,这将大大增加计算负担。因此,本文使用收缩约束以保证系统的稳定性。
综上所述,在时刻的优化问题()为:

(30)

初始条件:(),(),();
控制器参数:,,,,,,;
1)初始化,=0;
2)计算,得到,计算max∈(,,,)和min∈(,,,),获得;


5)将控制量()作为时间段∈[,+1]内的控制输入作用到服务星动力学模型上;测得(+1),(+1),(+1);
6)令=+1,返回执行步骤1,直到消旋任务结束。
3.3 迭代可行性和指数稳定
在消旋任务中,安全约束随着目标的运动而不断变化,使得每一时刻的优化问题都不同于前一时刻的优化问题。因此,本文结合文献[28]中的假设3和文献[19]中的命题1,给出了如下合理假设:

需要注意的是,在消旋任务中,安全约束随着目标的旋转而变化,控制约束也是时变的,这使得每次的优化问题都与前一次不同。然而,目前观测到的大部分失效卫星的旋转速度不超过18 (°)/s,这意味着和的变化非常缓慢,可以认为其值在短时间内没有变化,则此时问题()与文献[28]中的CNTMPC问题是一致的。
存在正实数∈(0, ∞),使得对于∀∈[,+1],∈,有

因为控制输入是有界的,且式(26)是线性系统,不存在有限逃逸时间,假设2是合理的。


(32)
式中:e为自然底数,则零点的指数稳定的。
假设系统的初始状态()属于,则FLC-MPC算法是迭代可行的,且闭环系统是指数稳定的。

同理,

(33)
由于0≤<1,<,所以()∈。因此问题()也是可行的,该优化问题迭代可行。
由式(33)及假设2可知

(34)
其中,是正整数集。又因为e(-1)-≥0,所以

(35)
上述不等式右侧并未直接与相关。考虑到
=(-)()≥(-)(), ∀∈[,]
(36)
则有

(37)


(38)
因此,闭环系统是指数稳定的。证毕。
4 仿真校验
4.1 仿真参数
本文主要研究对目标的消旋任务,因此,假设服务星在初始时刻已经抵至目标附近。此外,为了对比论证,本次仿真的翻滚目标与文献[16]中的案例1一致,为阿里亚娜-4火箭上面级。该上面级位于高度为700 km、倾角为0°的圆形轨道,其尺寸见文献[31],服务星的质量见文献[32]。本仿真使用的服务星-目标系统的物理参数如表1所示,且系统初始条件及控制器参数如表2所示。
在本文的仿真中,预测时域长度为=5,=01,采样时间为=01 s,权重矩阵=和=001,输入约束为=-=[1,1,1,1,1,1],状态上下界约束为=-,且
=[10,10,10,02,02,02,01,01,
01,01,01,01]
(39)
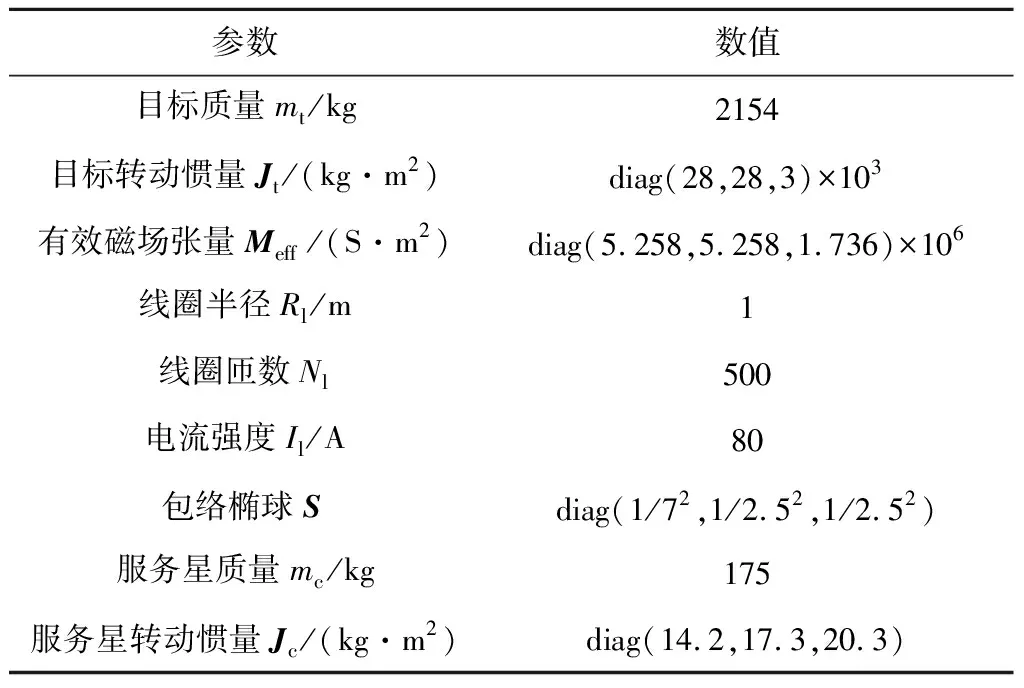
表1 服务星和目标的物理参数Table 1 Physical parameters of servicer and target satellite

表2 初始条件及控制器参数Table 2 Initial conditions and controller parameters
4.2 仿真结果
整个消旋过程的仿真时长为6 h。MPC问题通过YALMIP工具箱进行求解,仿真结果如下。
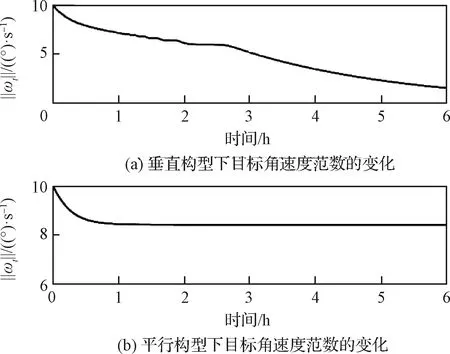
图4 垂直及平行构型下目标角速度范数的变化图Fig.4 Change diagram of target angular velocity’s norm in perpendicular and parallel configurations
从图4(a)可以看出,经过6 h的消旋后,目标的角速度范数从10 (°)/s衰减到2 (°)/s以下,而相应的,文献[18]用了超过10天时间才达到同样的效果。这说明了垂直构型下的近距离期望消旋轨迹对于提升消旋效率的作用。作为对比,图4(b)给出了相同环境条件下使用平行构型进行消旋的结果。根据平行构型的要求,期望轨迹取为
(40)
可以看到,此时目标角速度只能衰减到8 (°)/s以上,仍有较大角速度残余,无法完成对目标角速度的消减。
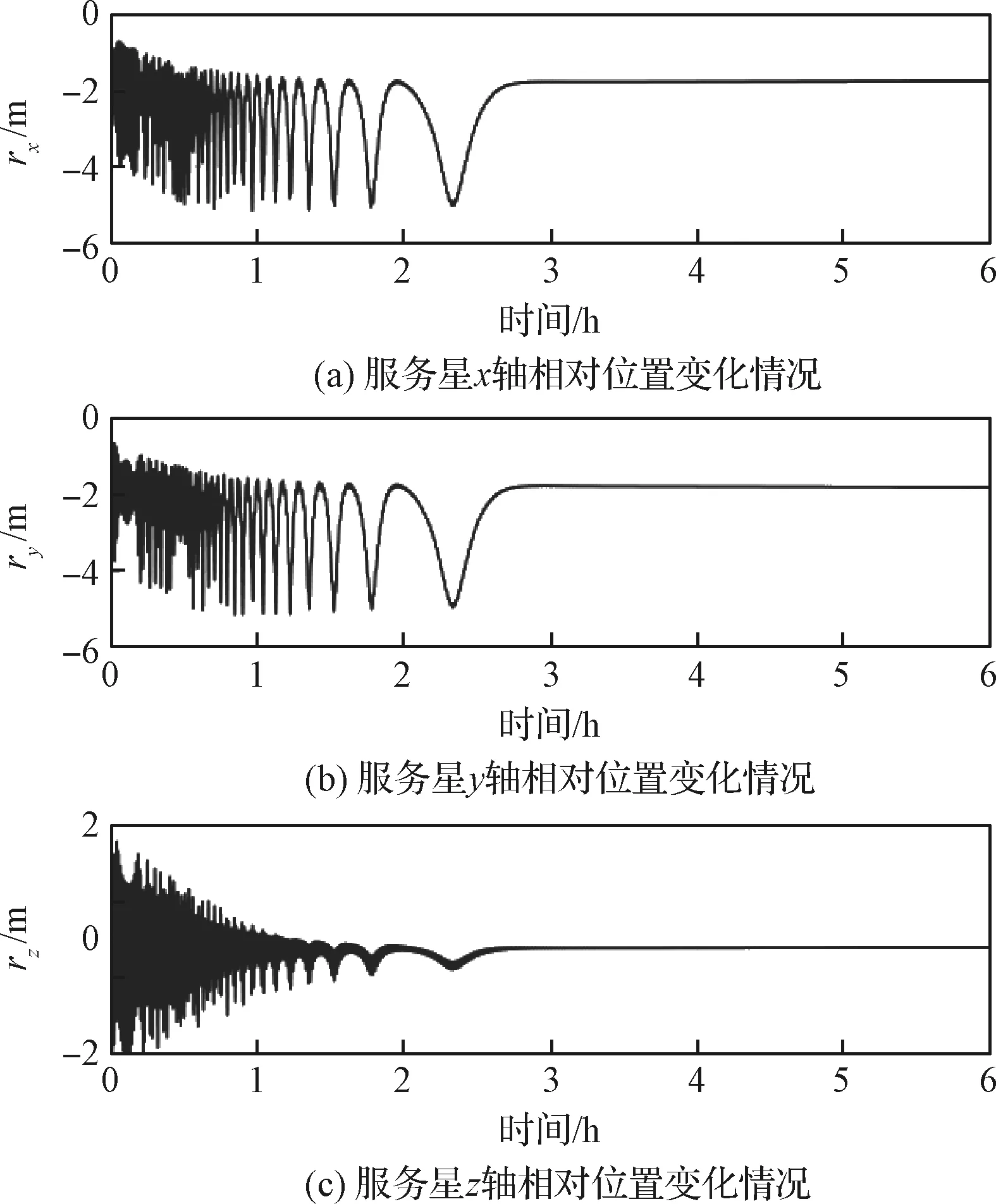
图5 服务星与目标的相对位置变化图Fig.5 Change of relative positions of the servicer and target satellite
图5展示了消旋过程中服务星与目标相对位置的变化情况。可以看到相对位置在最初的2 h内一直在振荡,然后趋于稳定。对比图4可以发现,前2 h 内,目标角速度的轴和轴分量也一直在振荡。因为前2 h内目标处于翻滚运动,而涡流消旋先将翻滚运动消减为自旋运动,随后服务星只需保持固定的相对位置,即可进一步对自旋运动进行消减。这可以节省消旋任务的燃料消耗。
在控制效果方面,图6给出了状态变量的范数变化情况。从图中可以看出,系统状态均在20 s内指数收敛到0,且状态变量()均处于约束集内。这与定理1的结果一致。

图6 位置以及四元数跟踪误差范数变化图Fig.6 Change diagram of position and quaternion tracking error’s norm

图7 控制输出变化图Fig.7 Change diagram of control output
图7显示了服务星控制量的无穷范数的变化情况。10 s后,服务星的控制量即稳定到很小的范围内,但稳定后,仍会有轻微波动。这是因为期望轨迹在不断变化,因此服务星需要进行相应的机动。在图7(c)中,由于在垂直构型中被抵消,与几乎相等。相应的,在图7(d)中,由于消旋力矩无法抵消,比大得多。另外,由于MPC具有非常好的约束处理能力,控制输出始终保持在控制约束集={|≤≤}中。
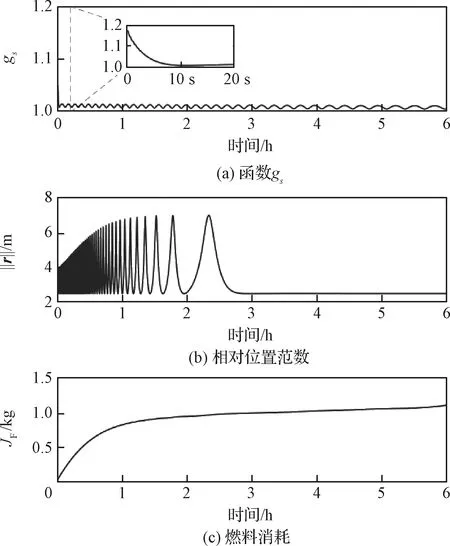
图8 函数相对距离以及燃料消耗变化图Fig.8 Change diagram of function relative distance and fuel consumption
(41)

综上所述,本文提出的期望轨迹与FLC-MPC算法可提高消旋任务的效率,且能够保证消旋任务的安全性和轨迹的实时跟踪。
5 结 论
本文设计了满足垂直构型要求的服务星消旋期望轨迹,并凸化安全区域基础上,提出了一种指数稳定的FLC-MPC算法,在保证任务过程安全的情况下,提高了涡流消旋的效率。与以往的研究相比,消旋时间从超过10天减少至6 h左右。作为代价,该方法需要服务星在消旋过程中不断移动,增加了任务过程的复杂性。但是,FLC-MPC方法可以避免碰撞,并且保证燃料消耗最优。为了减少计算量,本文采用反馈线性化方法对系统模型进行线性化,并对目标函数和控制约束进行了相应的处理,最后使用YALMIP工具箱对MPC问题进行求解,获得了最优控制序列,并将其施加上系统模型上,保证了系统的安全和稳定。