全球GPS基准站坐标序列噪声模型估计及其对站速度的影响分析
2022-06-10朱冀星邓丽红刘雨婷
朱冀星,邓丽红,刘雨婷
(华东交通大学 土木建筑学院,南昌 330013)
0 引言
全球定位系统(global positioning system, GPS)基准站二十余年来积累的坐标时间序列,为开展大地测量与地球动力学等研究提供了重要的数据基础。GPS基准站坐标序列中的成分较复杂,包含构造信号、周年和半周年等季节变化、阶跃、噪声等;其中GPS坐标序列噪声模型的辨识对于GPS站速度的准确估计具有重要意义。已有的研究指出,GPS基准站坐标序列中噪声项不仅有白噪声(white noise, WN),还包含闪烁噪声(fick noise,FN)、幂律噪声( power law noise, PL)、随机游走噪声(random walk noise, RW)等有色噪声。在实际应用中,组合噪声模型比起单一噪声模型能够更加准确地表征坐标序列中的噪声特性。文献[2]采用功率谱密度和谱指数估计的方法,分析了中国大陆地区3个GPS基准站的噪声特性,表明其具有FN+WN特性。文献[3]以中国香港地区的基准站坐标序列为研究对象,在通过主成分分析方法去除其共模误差之后,发现顾及有色噪声所计算的误差较单一的WN模型大2~6倍。文献[4]分析了美国加州南部及内华达地区的连续GPS基准站的噪声模型,得出约半数测站的最优噪声模型为FN或者RW。在GPS基准站中已得到验证的组合噪声模型还包括 FN+RW+WN、PL+WN等。然而,目前基准站坐标序列的最优噪声模型表现为多样性,且已有的大部分研究仅选用小区域的部分基准站点进行实验分析,对全球 GPS基准站的特性是否仍存在上述规律,有待进一步研究。
基于此,本文选取全球范围内的1 443个GPS基准站,采用FN+WN、FN+RW+WN、PL+WN以及广义高斯-马尔科夫模型(generalised Gauss-Markov, GGM)+WN模型,对坐标时间序列中的最优噪声模型及站速度参数进行估计与分析,探讨全球GPS基准站坐标序列噪声特性及其对站速度估计的影响。
1 GPS基准站坐标序列噪声模型及速度参数估计
1.1 GPS基准站噪声模型
GPS基准站坐标序列的噪声特性通常表现为FN、PL、RW、WN及其组合模型,对于WN模型,其协方差矩阵可表示为

WN+FN+RW 模型及其协方差矩阵可表示为

WN+PL模型及其协方差矩阵可表示为

式中:为白噪声振幅;为⋅的单位矩阵;为时间序列的长度;为有色噪声的振幅,为有色噪声对应的协方差阵矩阵。
噪声模型估计方面,国内外学者大多采用极大似然估计模型进行参数的求解,极大似然估计采用的似然函数为


通过调整C,使式(4)中似然函数(likelihood function, lik)达到最大值,获取对应的似然值及协方差阵中的系数、和等参数值,从而确定最佳噪声模型。根据极大似然估计原理,不同的噪声模型组合将得到不同的极大似然对数值,数值越大结果越可靠。然而,极大似然估值(maximum likelihood estimation, MLE)也受到噪声模型中未知参数的影响,当未知参数增加时,MLE值也随之越大进而导致噪声模型参数的有偏估计。
1.2 改进的贝叶斯模型估计准则
如何准确地辨识 GPS基准站坐标序列的噪声模型参数,国内外学者提出了相应的最优噪声模型估计准则。贝叶斯信息准则(Bayesian information criterion, BIC)常用于噪声模型估计,但该准则易受噪声模型自由度及时间序列长度的影响,并存在过度拟合的可能。基于这个原因,本文选用改进BIC准则(Bayesian information criterion true positives, BIC_tp)进行噪声模型估计可更精确的识别噪声模型,其表达式为

式中,为模型参数个数。
1.3 GPS基准站坐标序列站速度不确定度估计
通过对长周期的时间序列研究分析发现,纯白噪声背景假设会使得站速度估计结果产生偏差,导致速度不确定度的过低估计。因此在GPS应用于现代大地测量基准系统的建立和维持、高精度地球动力学等研究时,需要采用较为严格、准确的噪声模型以提高速度参数的确定精度。文献[15-16]给出了有色噪声背景下基准站坐标序列进行站速度不确定度的计算公式为

式中:Δ为数据采样间隔;Γ为伽马函数;为谱指数;为有色噪声振幅。
从式(7)可以看出,GPS基准站速度与噪声模型参数密切相关,因此准确辨识噪声模型是获取可靠站速度的关键。
2 GPS基准站坐标序列数据处理与噪声估计
选取全球分布的1 443个GPS基准站1992—2020年的坐标序列为研究对象,开展坐标序列噪声模型及其对站速度的影响分析。GPS基准站选取考虑如下因素:1)基准站全球均匀分布(站点分布见图1);2)长周期的GPS站坐标序列(大于10 a)有助于获取更为准确的噪声模型估计结果,图2给出了所选取的站点跨度统计结果;3)基准站坐标序列数据缺失率较低(<10%),以削弱数据缺失的不利影响;4)基准站坐标序列通过文献[8]获取。
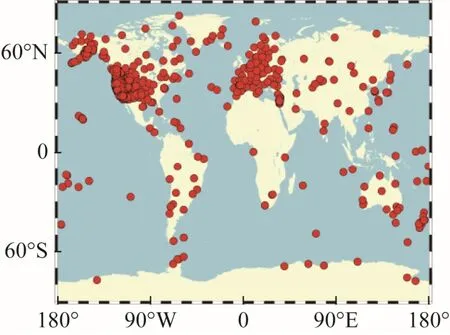
图1 GPS基准站分布【审图号:GS(2022)2347号】

图2 时间跨度统计
为了分析全球 GPS基准站噪声模型特性,采用FN+WN、FN+RW+WN、PL+WN 、GGM+WN噪声模型进行优噪声模型特性估计,通过采用赫克托(Hector)软件利用 BIC_tp估计准则进行最优噪声模型的确定。
3 GPS基准站噪声模型分析及其对站速度估计的影响分析
3.1 GPS基准站坐标序列噪声模型特性分析
对 GPS基准站进行最优噪声模型估计其统计得到结果见表1。

表1 不同噪声模型在3个方向上的测站数及占比
从表1可知,PL+WN、FN+RW+WN、FN+WN模型分别在、、方向上占比最大。此外,、、方向上分别约有3%、1%、3%站点的最优噪声模型表现为GGM+WN模型,表明不同坐标分量之间的噪声模型特性存在差异。
已有的研究指出,RW噪声分量难于探测,文献[20]指出对于振幅为0.4 mm/a量级的随机游走噪声,需要30 a的时间序列。从表1可知,所分析的 GPS站中约 9%~45%的坐标分量呈现出FN+RW+WN噪声模型特性,尤其在水平方向占比居多,进一步证实了长周期跨度的时间序列有助于准确识别GPS坐标时间序列中的随机游走噪声。为了进一步对FN+RW+WN特性的基准站空间分布特性进行分析,图3给出了FN+RW+WN噪声特性站点的空间分布情况。
从图3可以看出RW特性的站点大多分布在海岸线附近或者板块构造运动活动区域,其潜在影响机制有待进一步深入研究。

图3 不同方向具有RW特性的站点分布【审图号:GS(2022)2347号】
3.2 噪声模型对GPS站速度估计的影响
文献[21]指出,为了研究板块运动要求速度的精度必须达到0.1~0.2 mm/a,因此,准确地对GPS坐标时间序列噪声模型进行估计,对高精度GPS应用具有重要意义。为分析不同噪声模型特性对GPS站速度估计的影响,以FN+WN模型作为参考,分别对不同噪声模型假设下的速度估计结果进行对比分析。图4至图6、表2为分析结果从图4至图6给出的速度对比结果可知,在 FN+RW+WN和FN+WN模型下,站速度差值大于0.2 mm/a的站点分别在、、方向上占23.0%、26.2%、10.3%;GGM+WN和 FN+WN模型下站速度差值大于 0.2 mm/a的站点在、、方向上分别占3.3%、4.6%、3.8%;PL+WN和FN+WN模型下站速度差值大于0.2 mm/a的站点在、、方向上分别占5.8%;6.8%;2.6%。通过对图4至图6、表2进行分析可知,不同模型对速度估计值的整体影响较小。但在图4中速度差值大于 0.2 mm/a的站点占比明显较多,部分站点的速度差值达到0.6~0.8 mm/a,这对高精度的GPS应用来说其影响不可忽略。对速度差值大于0.2 mm/a站点进行分析发现其常存在RW噪声特性,进一步证明准确的探测RW噪声对估算精确的GPS站速度具有重要意义。

表2 不同噪声模型下速度差值的均值与标准差单位:mm·a-1

图4 FN+RW+WN模型与FN+WN模型的速度差值

图5 GGM+WN模型与FN+WN模型的速度差值

图6 PL+WN模型与FN+WN模型的速度差值

3.3 噪声模型对站速度不确定度的影响
不同坐标序列跨度下站速度估计结果存在较大的差异,且准确的探测RW分量需要近24 a的坐标序列。为了分析噪声模型对速度不确定度的影响,选取时间跨度在20~30 a的70个GPS基准站进行分析。与速度比较分析一致,选取FN+WN模型为参考不同模型的不确定度估计结果进行比较分析,其比值如图7所示。

图7 不同噪声模型GPS站速度不确定度比值

由图7知,FN+WN与FN+RW+WN模型下的不确定度比值基本在1以下,FN+WN与GGM+WN模型下的比值大部分在1以上,FN+WN与PL+WN模型下的比值趋势介于二者之间。由此可看出,RW 噪声对站速度不确定度同样有重大影响;GGM+WN模型下的站速度不确定度相对较小,表明准确地识别GGM模型,对提高GPS基准站速度的精度有重要意义。
表3给出了上述 3种比值在不同方向上的极值和均值。

表3 不同噪声模型GPS站速度不确定度比值极值与均值
由表3可知:在方向上,FN+WN的站速度不确定度分别是FN+RW+WN、GGM+WN、PL+WN模型的0.04~1.01、0.06~7.12、0.03~3.36倍;在方向上,FN+WN的站速度不确定度比值与方向结果类似,分别是 FN+RW+WN、GGM+WN、PL+WN模型的0.04~1.02、0.07~6.65、0.03~3.47倍;在方向上,FN+WN的站速度不确定度分别是FN+RW+WN、GGM+WN、PL+WN模型的0.03~1.01、0.08~8.94、0.00~3.15倍。由此可见,FN+WN与其余模型的站速度不确定度比值规律与图7一致。但在方向上,FN+WN的站速度不确定度平均值分别为 FN+RW+WN、GGM+WN、PL+WN模型的0.84、1.97、1.27倍,明显大于方向的 0.38、1.13、0.58倍和方向的 0.36、0.95、0.63倍。由此知,不同模型对GPS基准站速度不确定度均存在影响,且主要表现在、方向,方向上相对更小,但是不可忽略其影响。
4 结束语
本文采用BIC_tp模型估计准则对全球分布的1 443个 GPS基准站的坐标时间序列进行噪声模型特性及其对速度估计的影响进行分析,得出以下结论:
1)GPS基准站坐标序列噪声模型存在多样性,不能用单一的噪声模型来表述,实验结果表明,基准站坐标序列最优噪声模型中,PL+WN、FN+WN、FN+RW+WN、 GGM+WN模型分别比 39.7%、32.7%、25.3%、2.3%;此外,水平方向和竖直方向各测站的最优噪声模型存在较大差异。
2)噪声模型对GPS基准站坐标序列站速度的影响相对较小,但RW分量的存在,使得速度精度不可靠。同时 FN+WN与 FN+RW+WN模型下的不确定度比值基本在1以下,较FN+WN与其他模型的比值更小,说明 FN+RW+WN模型下的站速度不确定度相对较大,RW噪声使得速度不确定度偏大。如何对GPS基准站坐标序列的RW分量进行准确探测及分离有待进一步研究。
3)在GGM+WN噪声模型假设下,GPS站速度不确定度较小,即其对应的站速度参数更准确,表明准确的识别GGM模型对提高GPS基准站速度确定精度有重要意义。
感谢熊常亮和付杰同志在GPS数据处理、速度分析中给予的指导。