脑卒中手功能康复机器人应用研究
2022-06-09张捷李源莉孟铭强
文/张捷,李源莉,孟铭强
(1.上海中侨职业技术大学护理与健康学院;2.上海中医药大学中医智能康复教育部工程研究中心;3.上海希润医疗器械有限公司)
1.脑卒中手功能康复背景
1.1.脑卒中是健康的第一杀手
脑卒中(stroke)是我国成人致死、致残的首位病因,具有高发病率、高致残率、高死亡率、高复发率、高经济负担五大特点[1]。随着中国人口老龄化及城镇化进程的加速,脑卒中危险因素流行趋势明显,脑卒中疾病负担日益增加。数据显示,2020年我国40岁以上人群中,卒中患者约为1780万,卒中新发患者约为340万,卒中相关的死亡患者约为230万[2]。脑卒中后多半有运动、言语、认知、吞咽等功能障碍。
1.2.手功能康复是卒中康复的难点
手是人体重要的运动器官,关节自由度多,非常灵活,与我们的日常生活活动息息相关。人的上肢功能占全身功能的60%,手指功能占上肢功能的90%。手运动功能区占大脑皮层运动功能区的1/3,如图1。脑卒中后约60%的患者会遗留手功能障碍。据文献报道,脑卒中后3个月只有12%的患者手功能正常,38%的患者存在明显手功能障碍。脑卒中后6个月约30%~66%的患者不能实现手功能的完全恢复[3]。实现日常生活自理是脑卒中患者最大的愿望,而手功能障碍严重影响生活质量,因此手功能的康复是卒中康复的难点和关键。
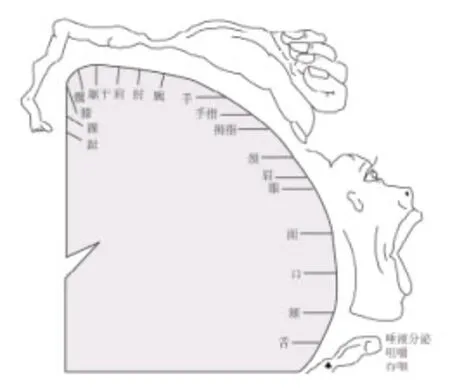
图1 大脑皮层运动功能区
1.3.目前手功能康复效果有待提高
目前脑卒中引起的手功能障碍康复治疗方法,是加强肌肉的锻炼,通过运动学习来重建或改善脑卒中患者手部运动功能,防止患者神经、肌肉的废用性发生,促进大脑神经代偿。传统的康复治疗中,治疗师对患者进行一对一的康复治疗,手把手的进行肢体康复,这种方法不仅劳动量大、效率低、费用昂贵,而且只能在专业的康复机构进行康复,难以在居家环境实施康复治疗;同时,治疗效果依赖于治疗师的经验和手法,缺乏评价训练参数和康复效果关系的数据,难以对康复训练方案和参数进行优化从而获得更好的治疗效果[4]。
如何更有效地改善脑卒中患者的手功能一直都是康复工作者们需要迫切解决的棘手问题之一。手功能康复机器人作为近年新兴的手功能康复治疗方法之一,已被逐渐应用于临床实践,并取得了较好临床效果。本文主要介绍手指功能康复机器人产品的国内外现状,提出了SRH软体手功能康复机器人新方案。
2.手功能康复机器人发展
2.1.人手结构分析
人手骨骼结构主要由腕骨、掌骨、指骨所组成,指骨又由近端指骨、中指骨和远端指骨组成,如图2。
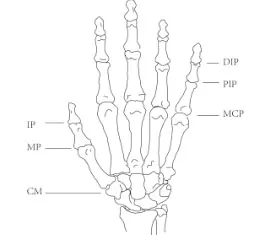
图2 人手结构图
人手自由度(DOF)共有21个,四指每个手指有4个自由度,其中掌指关节(MCP)具有2个轴线垂直相交的转动自由度,近端指间关节(PIP)和远端指间关节(DIP)各有1个自由度。大拇指除了指间关节(IP)以及掌指关节各1个自由度外,腕掌关节(CM)具有3个自由度,共有5个自由度。正常成人手指关节活动范围见表1[5]。
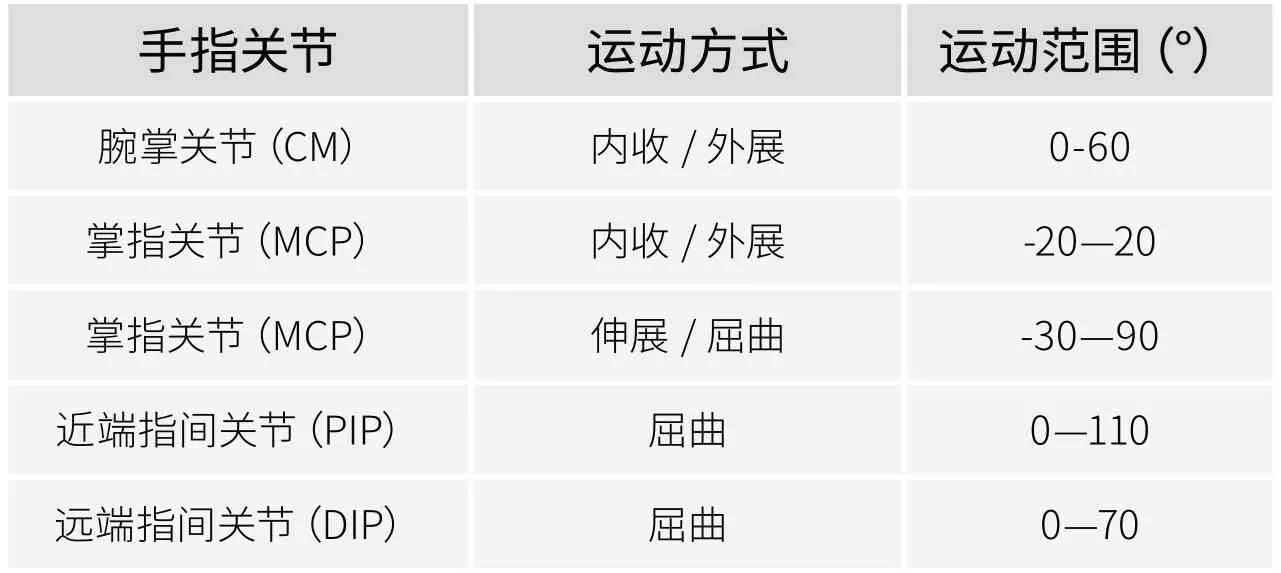
表1 正常成人手指活动范围
2.2.手功能康复机器人的康复原理
神经康复学科共识,成熟脑组织结构和功能具有可塑性,其可塑性有赖于传入刺激。神经元缺乏再生及分裂能力,但神经元间的联络可以重建。大量研究表明,脑卒中后患肢功能的恢复主要源于脑的可塑性变化。手功能康复机器人主要是针对脑卒中患者的患手进行集中、重复、强化训练。手功能康复机器人能促进两侧大脑半球与运动相关的可兴奋神经组织(包括对侧顶叶后部、躯体感觉区等)被激活,并通过与初级运动区、运动前区、辅助运动区等的联系,形成新的运动模式,也可与病灶对侧大脑皮质发生联系。激活同侧手的皮质投射区功能,从而加速脑卒中患者患手功能的恢复[3]。
2.3.手功能康复机器人优势
手功能康复机器人辅助疗法与传统康复训练比较,其优势如下[3]:
① 高效训练:可优化治疗师对患者进行一对一的康复,手把手的进行肢体康复治疗的方式。一名治疗师可以通过多台手功能康复机器人,同时给多位患者进行康复治疗,提高康复训练的效率;
② 精准康复:根据手功能康复机器人设定康复功能,可以确保康复训练过程中的一致性,且其康复治疗效果不受人为因素的干扰;
③ 趣味康复:结合手功能康复机器人生物信息反馈和游戏康复,为患者提供任务导向性和趣味互动性的康复训练,可提高患者主动配合进行康复训练的积极性,改善患者康复依从性;
④ 量化评估:运用先进传感器,手功能康复机器人可以监测训练过程中的数据,患者能看到自己康复的积极量化效果,增强康复信心,同时为康复医师对康复效果进行跟踪、评估、量化分析提供依据。
3.手功能康复机器人的发展现状
近年来,随着机器人技术的发展,国内外对于手功能康复机器人大量研究,涌现出各种手功能康复机器人。
3.1.手功能康复机器人的分类
手是人体重要运各器官,生理结构复杂,关节自由度多,非常灵活,使得手功能康复机器人产品也相对复杂,出现了多种手功能康复机器人技术路线。目前典型的手功能康复机器人产品,按照控制部位可分为末端控制手功能康复机器人和外骨骼手功能康复机器人;按照驱动方式可分为电机驱动、线缆驱动、气动手功能康复机器人等。
3.2.目前国内外典型的手功能康复机器人产品
① 奥地利Tyromotion公司Amadeo末端控制手功能康复机器人
奥地利Tyromotion公司联合格拉茨科技大学和康复临床中心研制的Amadeo智能手康复系统,是一款进行手及各手指独立主、被动训练的,电机驱动末端控制手功能康复机器人系统,如图3。使用该机器人进行量化训练,可帮助病人恢复手或手指的功能重建。该机器人有三种训练模式:主动训练、CPM训练、交互式训练,可显示主动、被动、交互训练时的各种相关参数[6]。


图3 Amadeo末端控制手功能康复机器人[9]
② 香港Rehab-Robotics公司Hand of Hope电机驱动外骨骼手功能康复机器人
香港理工大学研究人员研发的电机驱动外骨骼手功能康复机器人Hand of Hope,该手功能康复机器人共有5个自由度,其中每个手指都配有专门的线性微型电机独立提供驱动力,如图4。采用EMG信号,控制机械手上的线性微型电机,使患侧实现屈曲或伸展的康复训练。它可以促进肌肉再学习能力,鼓励患者以EMG信号形式通过自身肌肉运动带动患侧动作。利用电机协助受损肌肉进行训练,患者还可穿戴该机械手进行日常生活的功能运动,做简单抓握动作。该装置可实现四种训练模式:CPM康复;EMG触发运动;连续EMG驱动运动;完全独立运动[7]。


图4 Hand of Hope电机驱动外骨骼手功能康复机器人[10]
③ 意大利Gloreha线驱手功能康复机器人
Gloreha是意大利公司Idrogenet和布雷西亚大学(University of Brescia)的Franco Molteni博士合作研发的线驱手功能康复机器人。该手功能康复机器人每个手指背均配有一个软指套,由一个环套来固定一根线缆,五个电机单独驱动线缆来完成不同的精细动作,如图5。

图5 Gloreha线驱手功能康复机器人[11]
该手功能康复机器人可以产生独立手指的动作,但是不能针对单个关节产生动作;同时产生的作用力不能够对抗肌肉和关节特别僵硬的情况[8]。

4.软体手功能康复机器人的最新进展
传统的手功能康复机器人存在着体积大,结构复杂,功能性,安全性,舒适性不足等问题。近年来,得益于材料科学、控制、机电等学科的发展进步,软体机器人技术飞速发展,使得具有仿生性好、安全性高、穿戴便捷等特点的柔性软体机器人成为手功能康复机器人发展方向。
哈佛大学的Polygerinos等学者研制出一款针对手功能抓握障碍个体的辅助与家庭康复相结合的软体手功能康复机器人手套,共有5个自由度,如图6。该手套采用的软体执行器由使用纤维增强材料的成型弹性腔组成,该纤维增强材料具有诱导特定的屈曲、扭转和流体加压下的延伸轨迹的特性。这些软体执行器单独控制单根手指运动,在加压时辅助手指完成抓握动作,在未加压时表现出低阻抗性[9]。
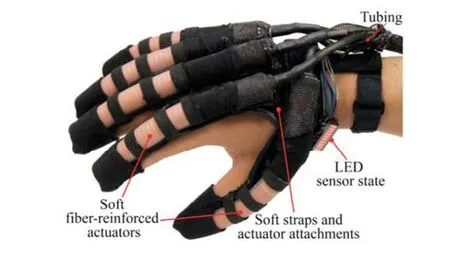

图6 哈佛大学软体手功能康复机器人[12]
5.软体手功能康复机器人方案
针对目前手功能康复机器人存在的问题和缺点,中侨大学护理与康复学院联合联合上海交通大学、上海知名康复专家及软体康复机器人创业公司,运用领先软体机器人技术,结合最新康复理念,提出SRH软体手功能康复机器人新方案,可满足医院、社区、居家全场景以及急性期、恢复期、后遗症期全周期康复需求,如图7。


图7 中侨护理与康复学院手功能康复机器人方案
5.1.软体手功能康复机器人方案性能优势:
SRH软体手功能康复机器人采用创新结构设计,具有多方面性能优势,如图8:
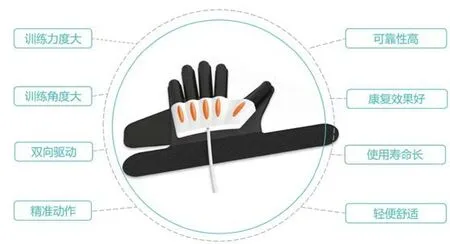
图8 SRH软体手功能康复机器人优势
① 训练力度大
突破传统软体手功能康复机器人力度小、不能用于关节僵硬患者康复的缺点,在进行任务导向性康复时,可以轻松抓握日常生活物品;
② 训练角度大
满足手指关节-45~270°活动度全范围康复;
③ 精准康复:
还应注意的是,在中国大多数村落都有源远流长的文字使用传统存在,这与地方社会历史上的文教状况有关。[注]张士闪、王加华、李海云:《礼俗传统与中国艺术研究——中国艺术人类学前沿话题三人谈之十四》,《民族艺术》2018年第6期。国家对于乡村社会的渗透,不仅仅是通过科举制度,也不限于村落家族出了多少秀才、举人、进士或官员,还应包括村内文字的日常使用。比如年节春联中对于“诗书继世长”的广泛标示,乡贤对于读书识字行为的褒奖,以及由此带来的对文字本身的敬畏等,都会对村落生活发生潜移默化的影响。
采用5个软体机器人驱动器独立驱动,单指精准康复,实现对指、三指捏等精细康复动作,更好恢复手指分离运动能力;
④ 双向驱动:
创新结构实现双向驱动,满足手指屈曲康复动作和伸展康复动作双向康复训练需要;
⑤ 可靠性高
高可靠性,长期使用性能不变化;百万次长寿命设计,满足患者整个康复周期需求;
⑥ 方便舒适
人体工学手套设计,使用方便,穿戴舒适;快速完成穿戴,减轻治疗师工作量,节省时间,提高效率。
5.2.软体手功能康复机器人方案助力全周期康复:
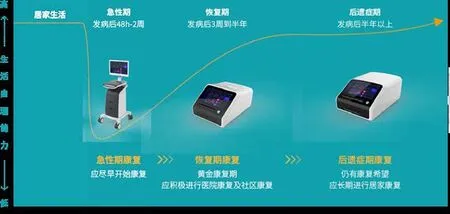
图9 脑卒中康复分期
对于不同康复阶段的患者,可以采用Lovett肌力分级,来评估患者肌肉力量,可将肌力分为0~5级。针对不同肌力等级的患者,SRH软体手功能康复机器人方案设计了不同的康复训练模式,康复模式与患者肌力分级之间关系如表2。

表2 正常成人手指活动范围
5.3.软体手功能康复机器人方案满足三级康复体系需要:
SRH软体手功能康复机器人方案设计了不同产品系列,分别满足医院,社区,居家康复的不同需求:
① 专业医疗版功能全面、性能强大,设计了精细被动康复、主从镜像康复、抗阻康复、游戏康复、大屏交互、EMG主动康复、BCI运动想象、AI智能评估等功能,如图10:

图10 专业医疗版软体手功能康复机器人
② 桌面康复版充分考虑社区康复需求,设计了精细被动康复、主从镜像康复、抗阻康复、游戏康复、大屏交互、AI智能评估等功能,如图11:

图11 桌面康复版软体手功能康复机器人
③ 便携康复版本,充分考虑居家康复需求,设计了精细被动康复、主从镜像康复、抗阻康复等功能;轻便小巧,内置电池,患者可随身携带,可随时随地进行居家康复训练,增加康复强度,提高康复效果,如图12:

图12 便携康复版软体手功能康复机器人
5.4.软体手功能康复机器人方案功能设计:
SRH软体手功能康复机器人方案设计了CPM被动手套操康复,MT主从镜像康复,BFT生物反馈康复,ART抗阻康复等功能,满足不同康复阶段需求;同时通过高精度传感器,记录康复过程数据,AI人工智能评估康复状态,为治疗师康复评估、量化分析提供依据,如图13。

图13 软体手功能康复机器人功能
6.未来手功能康复机器人的发展
随着各国专家积极致力于脑卒中手功能康复的研究,软体康复机器人的出现,很大程度上解决了传统康复机器人的缺点。软体康复机器人具有更好的仿生性能,消除了对非驱动自由度的限制,也减少了关节对齐问题,避免二次伤害。此外,软机器人更轻舒适,设计更简单,更易于携带,开启了家庭康复的新时代。患者在舒适的家中进行康复训练,降低了康复成本;同时居家康复还提高了患者的依从性,引导患者进行更积极主动的治疗,增加康复时长和强度,并有望改善康复治疗结果。
软体康复机器人是材料学、仿生学、机器人学、康复医学、生物力学、计算机科学等诸多领域的交叉学科,已经成为了未来手功能康复机器人领域的发展方向。随着科学技术的发展和对于脑卒中康复需求越来越大,未来软体康复机器人将会融合更多先进技术,如先进传感器技术、人机接口技术、脑机接口技术、虚拟现实技术等,使患者能有更好的康复效果,提高患者生活质量。