光电成像系统“猫眼效应”目标回波特征研究
2022-06-09李旭东王立平米建军李双全
李旭东,王立平,米建军,李双全
(1.西安应用光学研究所,陕西 西安 710065;2.32381部队,北京 100072)
1 引 言
现代战争中,大量的光电侦察、瞄准、火控、制导仪器等光电成像系统装备得到普遍应用,光电对抗也逐渐提上日程。借助光学、光电观瞄装置对照明激光的光路可逆原理(猫眼效应),采取相应的激光主动探测方式,在复杂背景中找出敌方隐蔽侦察的观瞄装置成为光电对抗的研究重点[1-5]。
自发现“猫眼效应”开始,大量专家学者对基于“猫眼效应”的激光主动侦察技术、迎面观瞄光电成像系统的“猫眼效应”原理、光电成像系统“猫眼效应”影响因素及模拟“猫眼效应”的方法等进行了详尽研究[6-16]。发现评价迎面观瞄光电成像系统“猫眼效应”的主要参数是反光指数,是迎面观察光电成像系统的内部固有特性,主要由光电传感器封装结构形式及材料反射率、光学系统设计及光电系统装调产生,实质上的表现是激光主动探测波长与被探测光电成像系统“猫眼效应”之间的关系,但却很少有作者对其进行研究。
2 光电传感器焦距调校基本原理
可见光光电成像传感器焦距调校通常在平行光管上进行,如图1(a)所示,照明光源位于平行光管焦点上,透射式靶标位于平行光管焦面上,靶标经凹面镜反射后形成无穷远处的靶标图像。待调光电成像传感器位于平行光管焦点处,通过调节光电成像传感器光学元件之间的间隔,将无穷远处的靶标图像清晰聚焦在传感器焦平面上,其目标及背景反射的光子信号经过传感器光电转换,再经过显示器的电光转换,形成清晰的图像供人眼观察。

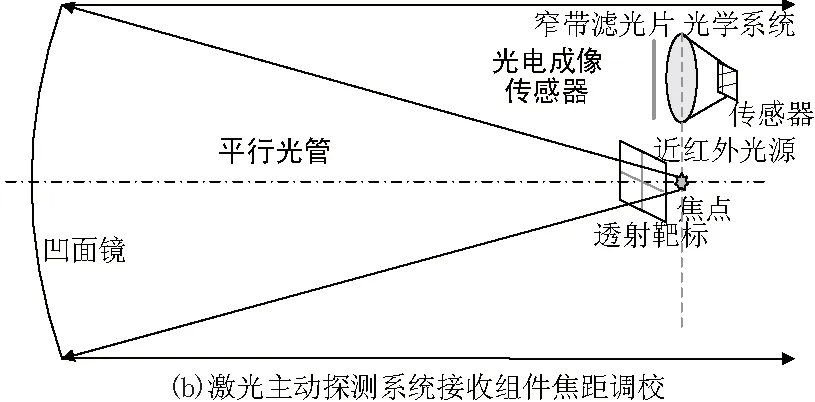
图1 光电成像系统与激光主动探测系统焦距调校原理图Fig.1 Schematic diagram of focal length adjustment of photoelectric imaging system and laser active detection system
激光主动探测系统接收组件焦距调校原理如图1(b)所示,由于激光主动探测系统接收组件为装有带宽不大于20 nm的窄带滤光片元件,其焦距调校时,为保证接收组件对目标及背景的清晰成像,必须将可见光光源更换为包含近红外波段(800~910 nm)光源或发光强度更高的光源,或激光主动照明光源作为照明光源,然后按可见光光电成像传感器的焦距调校方式,对激光主动探测系统接收组件进行焦距调校。
两种光电传感器焦距调校方式的不同,会造成激光主动探测系统对光电成像传感器进行探测时,在光电成像传感器上形成一定的离焦,会造成理论计算距离与实际探测距离之间存在较大差异,两者之间的差异关系亟待研究。
3 基于“猫眼效应”的激光主动探测数学模型建立
3.1 与入射波长相关的反光指数模型建立
可见光光电传感器按照成像效果可分为黑白传感器与彩色传感器两种,其窗口都为玻璃或彩色滤光片,可见光传感器光学系统多为多片球面镜或非球面镜耦合组成,对不同波长入射光会存在不同程度色散;当经光学系统聚焦后的入射光与光电传感器窗口不垂直时,对不同波长入射光也会存在不同程度的色散,且彩色传感器色散更为严重;光电系统装调时,由于光学元件装配的不平行对入射光也会带来一定程度的色散等。色散外在表现形式为:对有激光照明时,目标及背景的回波信号存在一定的离焦,因此,其光电成像系统“猫眼效应”特征会大大减弱,有必要对其目标回波特征进行研究,建立迎面观察光电装置反光指数模型,其数学模型[17]修正后如下式所示:
(1)
式中,τ为接收组件光学系统透过率;ρ为焦面上探测器元件的反射率或保护窗口的反射率;DCB为被探测组件(迎面观瞄光电传感器)圆形通光孔径直径;λ为入射激光波长。从式(1)中可知,一旦光电传感器选定且光学系统设计及装调完成,其被探测目标“猫眼效应”特征就严格与入射激光波长相关。
可见光光电成像系统焦面调校通常在平行光管上进行,校准光源通常为可见光光源,其波长范围集中在380~760 nm,能量峰值集中在500~600 nm之间,这里为计算简便,假定光源中心波长及传感器响应峰值波长为550 nm,而激光主动探测系统为减小暴露,通常应用800~910 nm近红外某个波段激光作为照明光源,光轴校准时通常将光源替换为近红外光源,波长中心范围控制在760~950 nm之间,因此,对于可见光光电传感器的探测,就必须对文献[17]建立的探测距离模型进行修正。
3.2 与入射波长相关的探测距离模型建立
将公式(1)代入文献[17]中的探测距离数学模型,修正后,其表达式如下式所示:
(2)
式中,l为激光主动探测模块最小探测距离;B为激光发射组件光束整形系统脉冲功率损耗率;P为激光器的单脉冲功率;ρ为焦面上探测器元件的反射率;Dd为激光探测组件通光孔径直径;DCB为被探测组件(迎面观瞄光电传感器)圆形通光孔径直径;τa为大气透过率;τ为被探测组件光学系统透过率;t为探测组件探测器设定积分时间;N为接收组件探测器对应激光探测波段的相对光谱响应度;C为探测组件探测器灵敏度;θh为照射源组件水平方向上光束束散角;θv为照射源组件垂直方向上光束束散角;Vs为探测组件探测器输出饱和电压;Sp为探测组件探测器像元面积;K为探测器的动态范围;λ为探测光电组件照明激光波长。
4 数值模拟
4.1 反光指数与照明激光波长数值关系模拟
根据公式(1),选用某型光电成像装置为探测目标,其迎面观瞄光电装置反射靶面反射率ρ为0.02,被探测光电成像系统光学系统可见光光学透过率95 %,近红外波段光学透过率90 %,被探测光电成像系统通光孔径直径DCB取50 mm,则迎面观瞄光电装置反光指数与照明激光波长间的数值模拟曲线如图2所示。

图2 反光指数与照明激光波长关系曲线Fig.2 Relation curve between reflectance index and illuminating laser wavelength
从图2中可看出,随激光主动探测光源组件照明波长增加,其反光指数逐渐降低,即被探测光电成像系统表现出的“猫眼效应”特征逐步减弱,因此激光主动探测装置选用照明激光波段时必须在照明激光红曝和探测距离之间做折中选择。
4.2 最大探测距离与照明激光波长数值关系模拟
根据公式(2),选用LDH-808-1000-BQ205型激光器作为照明光源,经光束整形后,其光束整形系统脉冲功率损耗率B=0.3,激光器的单脉冲功率P=1000 W,照射源水平方向发散角θh=8°,照射源垂直方向发散角θv=5.5°,光学系统透过率τo=0.9的激光发射组件;选用WHG1024型CMOS光电探测器作为接收组件,其在0.8 μm波段激光探测波段,探测器的相对光谱响应度N=0.3,光谱灵敏度C=2.74×104V·m2·W-1·s-1,饱和电压Vs=3 V,像元面积Ss=9 μm×9 μm=0.81×10-10m2,动态范围K=0.5,且探测器积分时间设定为t=1×10-3s;接收组件光学系统通光孔径Dd=30 mm。
选用某型光电成像装置为探测目标,其通光孔径DCB=50×10-3m,大气透过率τa=0.8,迎面观瞄光电装置反射靶面反射率ρ=0.02,最大探测距离与探测激光波长间的数值模拟曲线如图3所示。

图3 最大探测距离与探测激光波长数值模拟曲线Fig.3 Numerical simulation curve of maximum detection distance and detection laser wavelength
从图3中可看出,随激光主动探测系统照明激光逐渐红移,其对应面观瞄光电传感器的最大探测距离逐渐变小,与4.1节得出结论一致,探测激光波长仍是最大探测距离的重要影响因素。
5 实 验
鉴于该类型变波长照明激光光源组件难于研制,且必须研制与照明激光光源波长相对应的接收组件,难于采用正向方法验证建立数学模型的正确性,因此,选择满足4.2节条件的激光发射组件和激光接收组件组装为如图4所示的基于“猫眼效应”的激光主动探测装置,选择有效通光孔径50 mm,光学系统焦距可调的如图4所示的被探测光电成像系统,采用逆向方法验证建立数学模型的正确性,即首先在可见光条件下对无穷远目标将被探测光电成像系统调至图像清晰,记录激光主动探测系统的最大探测距离,然后将被探测光电成像系统逐渐远离激光主动探测系统,并将被探测光电成像系统逐渐离焦,记录被探测光电成像系统离焦后,激光主动探测系统对迎面观瞄光电传感器的最大探测距离,实验条件如表1所示,最大探测距离实验结果如表2所示。

表1 实验条件Tab.1 Testing condition

图4 激光主动探测系统与被探测光电成像系统Fig.4 Laser active detection system and detected photoelectric imaging system

表2 离焦前后最大探测距离实验结果Tab.2 Testing result of the maximal detecting range
6 结 论
通过可见光光电成像传感器“猫眼效应”影响因素,及两种光电传感器焦距调校方法异同分析,建立了与入射波长相关的最大探测距离数学模型,并进行了相应数值模拟与实验验证,发现照明激光波长与被探测光电成像系统“猫眼效应”密切相关,随照明波长逐渐红移,其激光主动探测系统最大探测距离逐渐下降,随被探测光电成像探测系统焦距逐渐变虚,当能对照明激光波段精确聚焦时,激光主动探测系统最大探测距离反而会达到最大。建议:(1)激光主动探测系统照明激光波长在810 nm附近选取;(2)针对可见光光电成像传感器“猫眼效应”对主动照明激光波长的不确定性,靶场最大探测距离定量试验时,选用目标特性较为稳定的角反射器作为最大探测距离验证标准器。
