基于二次相关法的非视域物体定位研究
2022-06-09王雪峰张自豪陈兴稣王元庆
王雪峰,张自豪,陈兴稣,王元庆
(1.伊犁师范大学网络安全与信息技术学院,新疆 伊宁 835000;2.河南工业大学人工智能与大数据学院,河南 郑州 450001;3.南京大学电子科学与工程学院,江苏 南京 210093)
1 引 言
非视域成像技术是近年来研究的热点技术,也是新发展起来的一种可以透射或者绕过障碍物进行成像的技术。传统的光学成像技术只能对视线范围内物体成像,而对于被遮挡的物体(如街道的拐角,烟雾后面)不能够成像。非视域成像就是打破常规的成像方法,专门针对于被遮挡的物体进行成像。非视域的成像过程如图1所示。
图1中,隐藏目标在屋内,观察者在屋外且观察者不能直接看到屋内的隐藏目标,利用传统的方式无法观测到隐藏目标。而非视域成像可以利用门作为中介反射面,经过光的多次散射获取到隐藏目标的信息,从而对其定位和重建。非视域成像过程根据光通过中介面方式的不同,分为反射成像(即应用较多的拐角成像)和透射成像,分别对应图1(a)和图1(b),图1(a)中的反射成像利用不透光的门,经过门表面对光的反射和散射,获取隐藏目标的信息;而1(b)中利用可以透射光的毛玻璃门,光直接透射过毛玻璃,对屋内的隐藏目标进行成像。
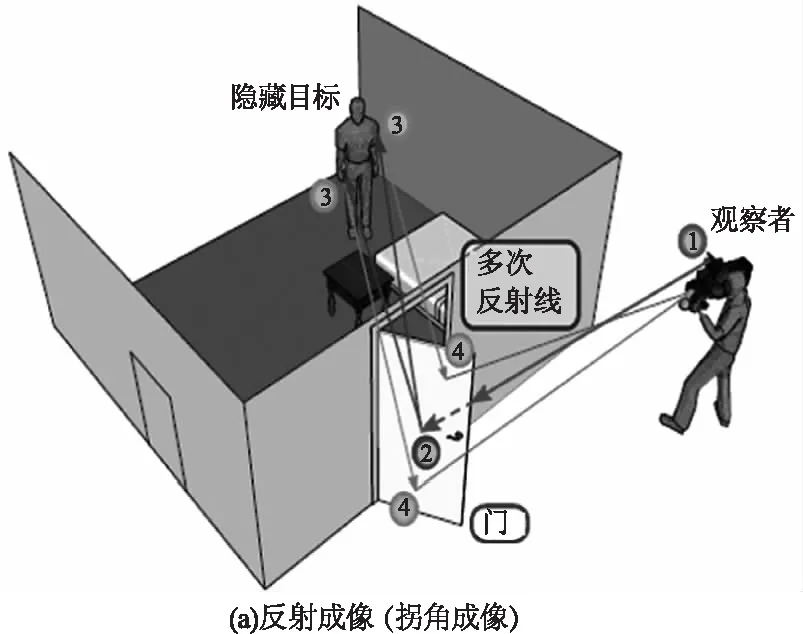

图1 非视域成像过程示意图Fig.1 Schematic diagram of non-line-of-sight imaging process
非视域成像中的实验设备需要激光和高精度的光子探测器,早期是麻省理工学院[1-2]构建的超快飞秒激光器和条纹管相机实验装置,其成像分辨率较高,但是实验设备比较昂贵。为了降低成本并获取足够的数据分辨率,Laurenzis等人[3-4]使用单光子技术来获取实验数据;Marco等人[5]使用了快速门SPAD(Single Photon Avalanche Diode 单光子雪崩二极管)相机阵列对非视域隐藏物体进行成像;Gariepy等人[6]也使用了SPAD相机来对非视域隐藏物体成像并追踪;Feng Xiaohua等人[7]研究了超快光场层析成像技术来完成非视域的瞬时成像。国内的研究起步较晚,近几年也取得了一定的成果,主要有激光距离选通成像的非视域成像[8];基于小孔透视非视域三维成像及成像方法的研究[9];单光子的非视域成像及地下洞穴研究[10-11];基于飞行时间(Time of Flight,TOF)相机的非视域成像研究等[12]。
近年来的研究大都旨在降低系统成本和获取更高分辨率,并希望能够缩短数据采集的时间。本文中采用纳秒激光器和APD阵列的实验装置,可以快速完成实验数据采集,不需要进行场景扫描,并采用二次相关法对采集的数据进行时延估计,得到光源与回波信号的时间延迟,实现对隐藏物体位置的快速定位。
2 基于二次相关的时延估计法
时间延迟估计(Time-delay estimation,TDE)算法简称时延估计算法,是根据信息经过不同距离的传播,在一定的速度下计算不同传感器接收的信息时间差异,来确定其他相关参数如信号源方位、距离等信息。时延估计算法应用非常广泛,在声纳系统、雷达系统、生物医学、地震及物理等领域都有应用。本文将时延估计算法应用到非视域隐藏物体的定位研究。时延估计法的实现主要是互相关法,为了提高时延估计的精确度,唐娟等[13]进行了二次相关法的研究,并证明了二次相关法在信噪比较低的情况下,仍然可以得到较高的时延估计精度;后来研究者使用此方法进行了声源定位[14-16]、光纤传感器[17]的定位及语音信号[18]等应用。
对于有源探测系统中,设源信号为s(n),一个信号源发射信号被探测器接收,接收信号可以用如下数学表达式描述:

(n=0,1,…,N-1)
(1)
其中,N表示连续观测样本数;D表示多个信号;αd表示第d路信号的幅度衰减;v(n)表示高斯噪声;τd为第d路信号到达时延;s(n)表示源信号。假定噪声均为零均值,方差为1的正态平稳随机过程,且噪声之间以及信号与噪声之间相互独立。互相关法就是计算源信号与接收信号之间的相关函数:
Rsx(τ)=E[s(n)x(n+τ)]
(2)
式中,Rss(τ-τd)表示源信号s(t)的自相关函数;E[·]表示数学期望。在式(2)的计算过程中,源信号与噪声之间完全正交,则:
(3)
由自相关函数的性质可知,当τ-τd=0时,Rss达到最大值,即两个接收信号的相关性最大。因此选择Rss(τ-τd)取得最大值的τ值作为时延值:
(4)
二次相关法是在互相关法的基础上,对源信号进行自相关函数的计算,并与互相关函数再次进行二次相关,这样首先对源信号进行自相关提高了信噪比,然后与互相关结果进行再次相关,就可以在较低信噪比的情况下,提高时延估计的精确度。二次相关函数的计算过程如下:
源信号的自相关函数:
Rss(τ)=E[s(n)s(n+τ)]
(5)
二次相关函数为:
Rrx(τ)=E[Rss(τ)Rsx(τ)]
(6)
将式(2)和式(5)代入式(6)中,可得:
Rrx(τ)=E[Rss(τ)Rsx(τ)]
=(E[s(n)s(n-τd+τ)]+E[s(n)v(n)])·
E[s(n)s(n+τ)]
(7)
由互相关函数的推导过程及二次相关函数的定义可知,二次相关函数的时延估计也是当τ-τd=0时,Rrx达到最大值,即只要找出Rrx最大值所对应的时间点(横坐标的位置),再加上采样率(时间信息),就可以进行时延估计。
3 非视域隐藏物体的定位
本文中的实验设置中采用了4个APD接收回波信号,如图2所示,一束脉冲激光从L点照射到扩散体上D点,光透射过扩散体(扩散膜),并继续扩散传输到隐藏目标表面S点,如图2中扩散体D点到隐藏目标S点(中间长虚线)所示,隐藏目标会再次产生后向散射光到扩散体上(此时隐藏目标作为信号的光源点继续进行传输),最终被放置在扩散体外侧(与激光光源同侧)的APD探测器接收,如图中隐藏目标S点到A1、A2、A3和A4点(4条点虚线)所示。这样就完成了一次激光照射和APD探测器接收信号的过程,由于隐藏目标表面可以看作是许多个散射点,那么APD接收信号应该是来自于隐藏目标所有点的回波信号,而这些回波信号也会以不同的时间延迟到达APD探测器。

图2 实验设置中4个APD接收信号过程图Fig.2 Process diagram of four APD received signals in experimental setting
设置光源信号为IL(t),则一个APD接收的回波信号如下:

(n=0,1,2,…,N-1)
(8)
其中,IAij为第Aij个探测器接收的回波信号;D为隐藏目标表面的光反射个数点;αd为第d条路径的幅值衰减;τd表示第d条路径的时间延迟;vij(n)表示接收的噪声。
则有矩形阵列排布的APD阵列接收信号为:
根据时延估计算法,计算源信号与APD阵列信号的相关性,根据式(8):
RLAij(τ)=E[IL(t)IAij(n+τ)]
(9)
假设噪声与信号之间相互独立,则表示它们之前完全正交,没有相关性,则相关性为0,即式(9)中RLv为0,则上式可以写成如下:
(10)
从式(10)发现APD接收的回波信号与源信号之间的相关性,其实是源信号的自相关,就是源信号与经过时间延迟τd的回波信号的相关,在本文中即是各个APD接收回波信号与激光光源信号之间的相关性。
二次相关法由源信号的自相关函数与式(10),即源信号与APD接收信号的互相关函数,再次进行相关,由式(6)可得二次相关函数为:
(11)
由式(11)及相关函数的性质可知,如果想要相关函数RRAij(τ)达到最大值,即两个信号之间的相关性达到最大,我们只需要让τ-τd=0。因此选择RRAij(τ-τd)取得最大值的τ值作为时延值:
(12)
则APD阵列中每个APD与源信号进行相关后,得到的所有时延值为:
(13)
最后根据式(13)得到的时延估计值及光在空气中的传播速度c,得到距离信息r=cτ,根据不同的时延估计值,得到不同距离信息,对于三维空间的物体定位,我们需要求解方程组,完成对非视域物体的位置(深度信息)定位。
4 实验结果
本文进行了两组不同的实验,分别使用互相关法和二次相关法进行对比实验。实验设置中采用纳秒激光光源照射矩形扩散体中心位置,4个APD探测器分别放置在扩散体的对角线上四个位置,分别标记为APD11、APD12、APD21、APD22,并同时接收回波信号,光源照射一次,就可以完成数据采集,定位隐藏物体深度信息。
实验一:对不同深度隐藏物体的定位
实验设置中将隐藏物体分别放置的深度为距离扩散体252 cm 和172 cm处。使用互相关法得到的4个APD的时延估计值如图3和图4所示。
由图3可知,在隐藏物体距离扩散体252 cm处时,4个APD使用互相关法与源信号进行时延估计,得到的时延估计值分别为-17.8 ns、-17.9 ns、-18 ns和-17.9 ns,根据时延估计值计算得到隐藏物体的深度信息为255.53 cm,误差值为3.53 cm。从图4可知,在隐藏物体距离扩散体172 cm处时,4个APD使用互相关法与源信号进行时延估计,得到的时延估计值分别为-12.6 ns、-13.1 ns、-13.2 ns和-12.3 ns,根据时延估计值计算得到隐藏物体的深度信息为174.57 cm,误差值为2.57 cm。
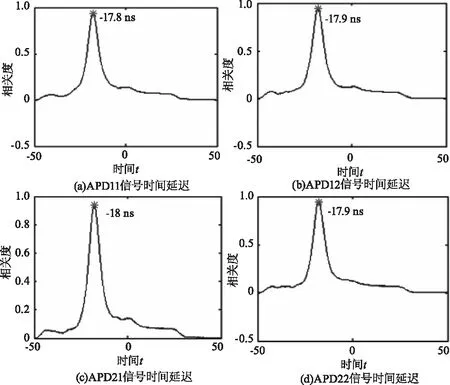
图3 互相关法在隐藏物体深度为252 cm处的时间延迟估计Fig.3 Time delay estimation of the hidden object at 252 cm depth based on cross-correlation method

图4 互相关法在隐藏物体深度为172 cm处的时间延迟估计Fig.4 Time delay estimation of the hidden object at 172 cm depth based on cross-correlation method
使用二次相关法进行时延估计,得到的时延估计值如图5和图6所示,从图5可知,在隐藏物体距离扩散体252 cm处时,4个APD使用二次相关法与源信号进行时延估计,得到的时延估计值分别为-17.6 ns、-17.6 ns、-17.8 ns和-17.6 ns,根据时延估计值计算得到隐藏物体的深度信息为251.44 cm,误差值为0.54 cm。从图6可知,在隐藏物体距离扩散体172 cm处时,4个APD使用二次相关法与源信号进行时延估计,得到的时延估计值分别为-12.4 ns、-12.9 ns、-12.9 ns和-12.1 ns,根据时延估计值计算得到隐藏物体的深度信息为171.87 cm,误差值为0.13 cm。
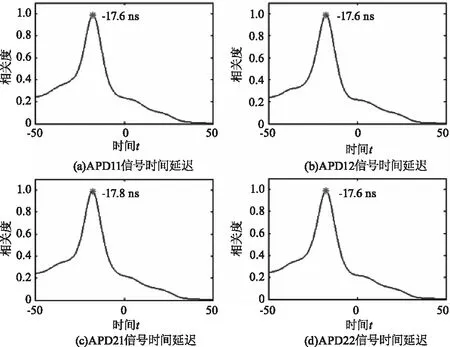
图5 二次相关法在隐藏物体深度为252 cm处的时间延迟估计Fig.5 Time delay estimation of the hidden object at 252 cm depth based on quadratic correlation method
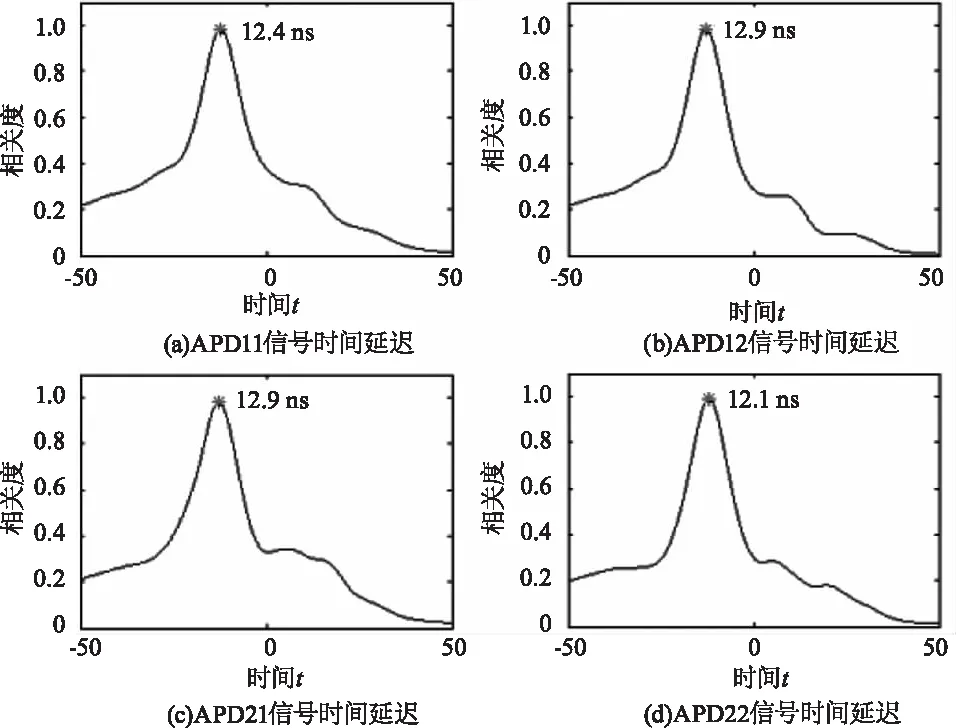
图6 二次相关法在隐藏物体深度为172 cm处的时间延迟估计Fig.6 Time delay estimation of the hidden object at 172 cm depth based on quadratic correlation method
表1显示使用二次相关法分别进行了5次实验的误差分析,定位深度分别为172 cm和252 cm,通过实验可以看出,经过多次实验且在不同的定位深度下,二次相关法的定位误差都小于1 cm,定位误差的波动不大。
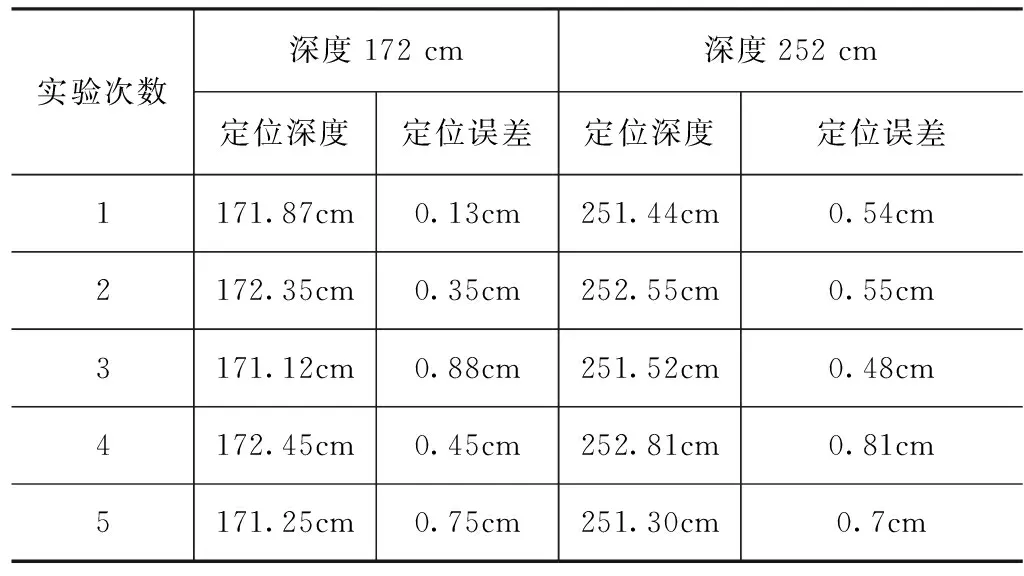
表1 二次相关法在不同定位深度下的误差分析Tab.1 Error analysis of quadratic correlation method at different depths
由以上的实验结果可得,使用二次相关法比互相关法对于非视域隐藏物体的定位更加准确,误差值大约减少了2~3 cm。
实验二:在不同信噪比下对隐藏物体的定位
分别进行了5个不同信噪比情况下的实验对比,信噪比分别设置为5 dB、0 dB、-5 dB、-10 dB和-11 dB,实验中隐藏物体距离扩散体的距离为252 cm。
使用互相关法进行不同信噪比的4个APD时间延迟和隐藏物体定位深度的实验结果如表2所示,从表中可以看出,当信噪比的值不断下降时,定位深度的误差也在不断的增加,特别是当信噪比在-5 dB、-10 dB和-11 dB时,误差值分别为4.9 cm、6.28 cm和9.07 cm,当信噪比较低时,误差也较大,由此可以看出,互相关法对于噪声比较敏感,当噪声较大时,定位精度也较差。

表2 互相关法在不同信噪比下的实验结果Tab.2 Experimental results of cross-correlation method under different SNR
使用二次相关法进行不同信噪比的4个APD时间延迟和隐藏物体定位深度的实验结果如表3所示,从表中可以看出,当信噪比的值不断下降时,定位深度的误差也在不断的增加,但是误差增加并不是很大,在信噪比从5 dB增加到-5 dB时,定位深度信息的误差增加并不是很大,基本上差不多,当信噪比为-11 dB时,定位深度信息的误差增加到2.87 cm,对于米级的定位深度,也在可以接受范围内,比使用互相关法的定位误差小6.2 cm。
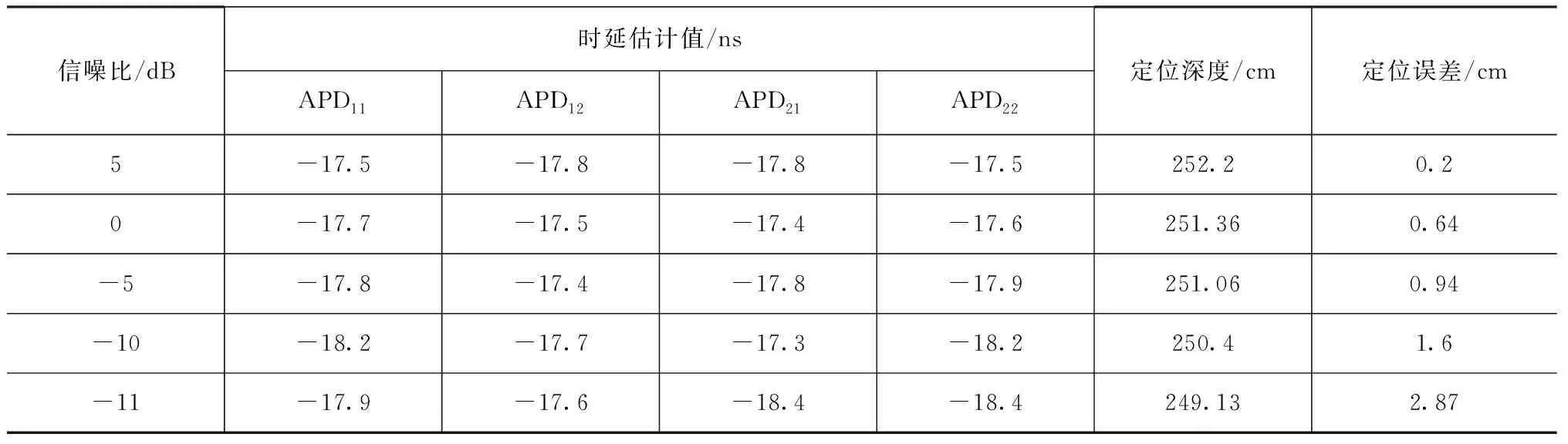
表3 二次相关法在不同信噪比下的实验结果Tab.3 Experimental results of quadratic correlation method under different SNR
5 结 语
本文使用二次相关的时延估计方法对非视域隐藏物体进行定位,比使用经典的互相关法的定位精度更高。分别进行了不同深度定位、多次实验和不同信噪比定位的实验,实验结果表明,二次互相法在不同深度下,并进行多次实验都能得到更高的定位精度;在信噪比更低的情况下,也能够得到较高的定位精度,且误差更小;比使用互相关法的时延估计提高了定位精度,特别是当噪声较大时,定位结果更加准确。