乡村振兴战略下无人机技术在数字乡村建设中的应用
——以麦积区三岔镇吴砦村为例
2022-06-09苟彦梅陈代鑫杨发辉刘帅帅
苟彦梅,陈代鑫,杨发辉,刘帅帅
(甘肃林业职业技术学院 测绘工程学院,甘肃 天水 741000)
0 引言
利用测绘高科技手段获取乡村的三维影像数据,构建乡村实景三维模型、数字正射影像等数字化产品,以此空间数据信息技术开展乡村建设,建立乡村空间数据库,服务于乡村规划建设,提升乡村人居环境建设水平和村民幸福感,达到乡村振兴的示范作用。
吴砦村位于甘肃省天水市麦积区,是三岔镇的行政中心,是已有900余年历史的古城,具有文化历史意义。其为南宋抗金名将吴璘所筑,清乾隆年间,吴砦城设三岔厅署,陡崖上的古城历经沧桑,传承了中华文化。据《秦州直律州志》载:“城的四角均有哨楼,四面的土城墙下宽七米,上端两米,城墙四角和四面有两处城墩”[1]。如今,吴砦古城进行了古城保护项目,城墙重新修缮,加之新农村建设推进,吴砦成为集商贸、旅游、文化为一体的新时代古镇。吴砦智慧化建设需要获取乡村空间大数据,由内业数据处理生产高精度的正射影像DOM,构建乡村三维模型。
1 倾斜摄影测量技术
无人机摄影测量技术是使用多旋翼无人机搭载形式多样的摄像头及轻型便捷五镜头倾斜相机以作业模式进行摄影测量[2]。也搭载单镜头相机以倾斜摄影作业模式进行摄影测量[3]。地形区域的倾斜影像获取可用单镜头相机作业模式、利用航线规划软件规划正射及倾斜4个不同角度的航线。不同航线规划软件设计倾斜航线稍有区别,特殊情况的建筑物倾斜影像获取可手动遥控无人机,设置好参数采集倾斜影像[4]。
倾斜摄影三维建模的关键技术主要有以下几种:一是倾斜影像与POS数据、像控点坐标数据进行联合空三加密,多视影像密集匹配为获得高密度三维点云,其影像匹配实质是多幅影像之间寻找同名点,即同名像点提取及匹配[6]。多视影像联合平差是充分考虑非摄影测量信息,如影像畸变较大的情况,作为附加条件一起参与平差,以共线条件方程为基础方程,列出的误差方程为解算参数的核心,建立非摄影测量信息的误差方程联合解算[5]。二是倾斜摄影纹理映射。对点云进行切割分块,利用切块点云数据构建3D TIN,建立每个瓦片打包的任务,选择最佳纹理信息,自动纹理切片映射,带纹理的模型需要建立多细节的LOD分级层次,提高分层次浏览模型的效率,完成实景三维模型的构建[7]。
2 基于倾斜摄影测量技术的古村数字化技术流程
第一阶段要实地考察,沟通协调,进行拍摄难度评估,成本评估,研究航摄飞行方案、像片控制点布设与控制点测量方案;第二阶段是外业数据采集,完成像片控制点的布设与像片控制点实测、无人机航拍影像采集;第三阶段是内业数据处理,实景三维模型、DSM、DOM等数字化产品生产;第四阶段是后续数据的二次开发,BIM+三维 GIS 动态信息管理平台,建设三维GIS信息库等,用于乡村的合理规划,以成果数据建立一套智能化、高校化、可视化的数字化乡村形态管理体系[8]。图1为项目实施路线任务图。

图1 古村数字化的技术流程Fig.1 Technique process of digitalization of ancient villages
3 吴砦古村数字化项目的实施
吴砦古城的南城墙外有人工深壕,有遗留下来的城东门、牌楼等遗址。为解决乡村发展建设与文化古迹保护的矛盾,采用实景三维模型,其能够直观反映文化古迹的现状,以数字形式永久保存。
无人机倾斜摄影测量的飞行无人机选择大疆公司大疆精灵4pro,航线规划软件选择广州市达北信息科技有限公司的智行航线规划软件。通用版本巡检包括通道路径巡检、精绅化巡检、全景720巡检、航空测绘四大巡检功能模块,全面覆盖各现有智能飞行方式。航空测绘模块中,软件实现了矩形和任意多边形全自动航测,为保证旁向分辨率,采用前后倾斜和90°格网飞行结合的方式,实现高密度保旁向重叠率的无人机自动化飞行方案。软件实现航测的全自动数据采集,保证数据质量,同时支持断点续传,多次作业,飞行设计为“井”型航摄方案,图2为“井”字航线飞行方案。

图2 “井”字航线飞行方案Fig.2 “井” shape airline operation scheme
倾斜影像重叠率要求很高,航片重叠率影响航片拼接时同名点数,重叠率高,则同名点数多,相对定向中误差小。为保证三维影像模型精度,建议大重叠率敷设方案[9]。规范要求航向重叠率不小于53%,旁向重叠率不低于8%,在实际操作中发现,较大重叠率可以提高成果质量,建议航向重叠率不低于80%,旁向重叠率不低于70%。对旋翼机而言,飞行速度越快,越会影响照片的重叠度及曝光率。在高精度建模中,无人机速度越慢,模型精度越高、细节效果越好。在保证模型精度高的同时,要兼顾飞行作业效率。为防止无人机返航时返航高度过低,造成撞机事故发生,设置返航高度至少要高于航飞高度。
4 吴砦古村航测数据内业处理
4.1 古村实景三维模型的构建
本次使用Bentley Context Capture三维建模软件。导入具有坐标信息的影像数据、POS 外方位元素数据、连接点等信息,加入多视影像区域网平差的误差方程内,联合平差计算完成,加密出加密点的物方坐标与像片高精度的外方位元素[6]。选择空间框架选项卡→设置空间参考系统→设置切块模式→自适应切块,根据计算机内存设置目标RAM使用量,选择兴趣区域进行切割分块,生成瓦片,构建TIN模型,自动纹理关联生成三维场景[3]。图3为三角网格模型图,图4为白模三维模型。

图3 部分三角网格模型截图Fig.3 Screenshot of some triangular network models

图4 部分白模三维模型截图Fig.4 Screenshot of some white model 3D models
4.2 吴砦古村正射影像
Pix4Dmapper软件为瑞士Pix4D公司世界级研究机构EPFL近10年的研究成果,软件是集全自动、快速、专业精度为一体的无人机数据采集与航空影像数据内业处理,可快速生成最精准、详尽的质量报告。Pix4Dmapper软件全自动工作流程操作直观简单,具有自动正射影像的功能,可把影像转化为数字模型和地图,实现高精度航拍监控与数据分析[10]。使用详尽的质量报告和 ray Cloud,可评估并提高项目质量。图5为空三射线,图6为部分数字正射影像。
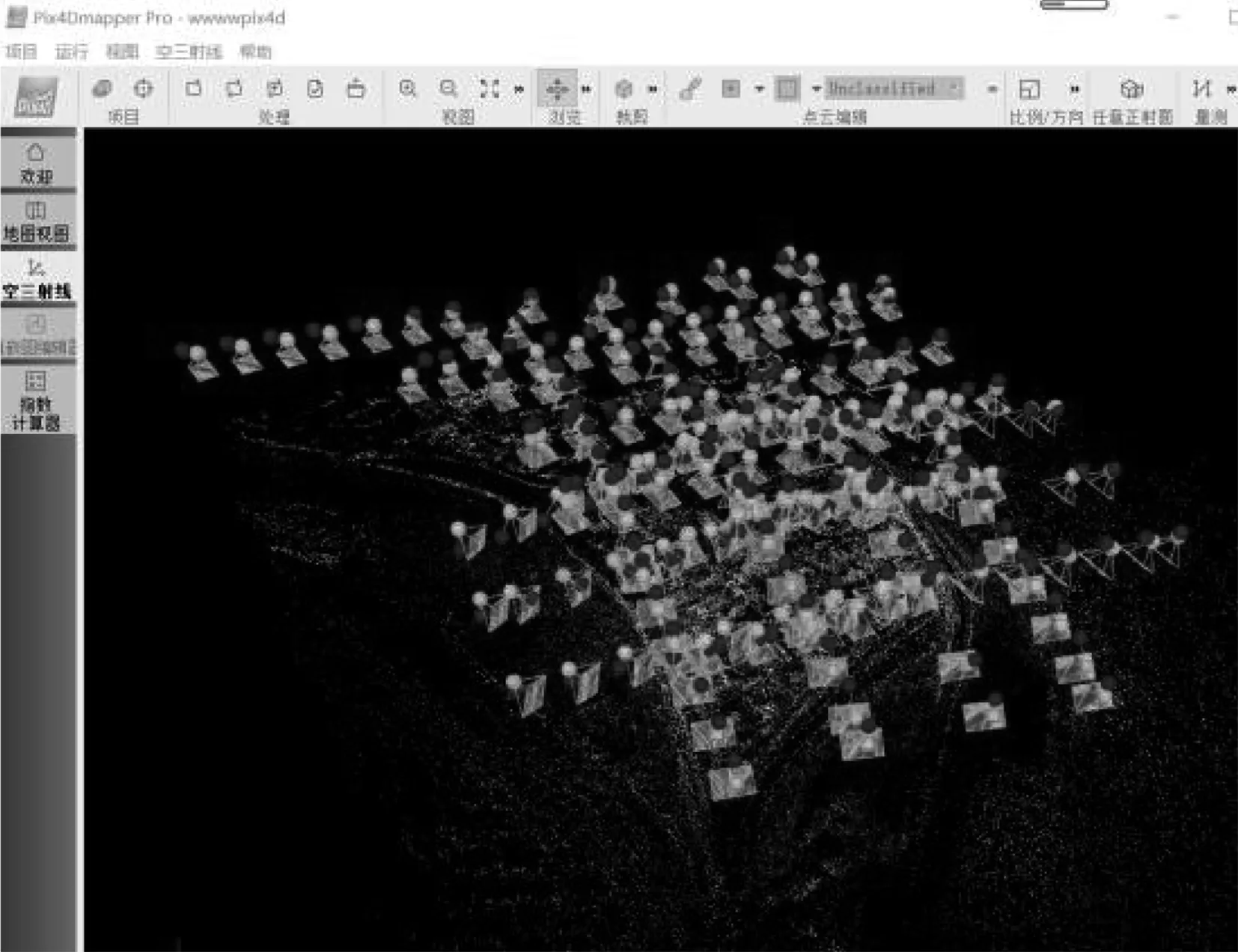
图5 空三射线截图Fig.5 Screenshot of empty three ray

图6 部分数字正射影像Fig.6 Some digital orthophoto images
5 古村数字化的意义
实景三维模型的构建可以利用虚拟现实技术展示新吴砦古城的面貌,扩大吴砦古村的宣传力度,发展古城的智慧旅游项目。构建城东门、牌楼等遗址的实景三维模型,可解决乡村发展建设与文化古迹保护的矛盾。实景三维模型能够直观反映文化古迹的现状,以数字形式永久保存。基于无人机低空摄影测量的高精度正射影像图的生成,可辅助乡村总体规划,为规划乡村道路及乡村路网管理提供基础数据。
