多源数据融合实现“空地联合”在校园三维建模中的应用
2022-06-09季晓菲苟彦梅
季晓菲,苟彦梅,张 福
(甘肃林业职业技术学院,甘肃 天水 741000)
建立三维实景模型方式多源,其中倾斜摄影测量技术是利用多角度摄影装置同时快速获取倾斜影像和POS数据,通过空三处理、影像匹配和纹理映射等技术手段,真实还原地表实景模型,但该建模技术尚存在未克服的缺点。为提高模型精度,需布设大量外业像控点。由于遮挡等因素,建筑物底部纹理结构拉花。另一种构建三维实景模型的方式是利用三维激光扫描技术,通过激光扫描测区的点云数据,经过数据处理,生成TIN模型及纹理映射来构建三维实景模型。然而该技术在应用上也存在缺点,即高层建筑物顶部扫描漏洞,相机拍摄角度不理想等。
针对上述两种技术建模存在的问题,利用两种技术手段,实现“空地联合”,互相弥补不足,获取测区全方位的空间地理信息,构建高精度的三维模型。点云数据的高精度可免除外业像控测量,降低劳动强度,提高作业效率。
1 融合建模工程的实施
1.1 融合建模设计
两种技术手段融合建模的基本思想是利用倾斜摄影获取空中多角度影像,经过空中三角测量加密和影像密集匹配同名像点,构成大量密集点云,将这些点云数据与地面三维激光扫描的高精度点云通过自动化建模软件(Context Capture)进行融合、三维建模。其技术路线如图1所示。
1.2 设备概况
背负式移动扫描系统由欧思徕智能科技有限公司生产研发,激光扫描设备如图2,仪器参数如表1。该系统可用于三维制图、室内采集、三维建模等领域。场景中不管有无GPS信号,均可获得高精度的点云数据,可支持步行、骑行等多种作业模式,该系统主要集成了相机、激光雷达、IMU、GNSS、控制器等设备[1]。
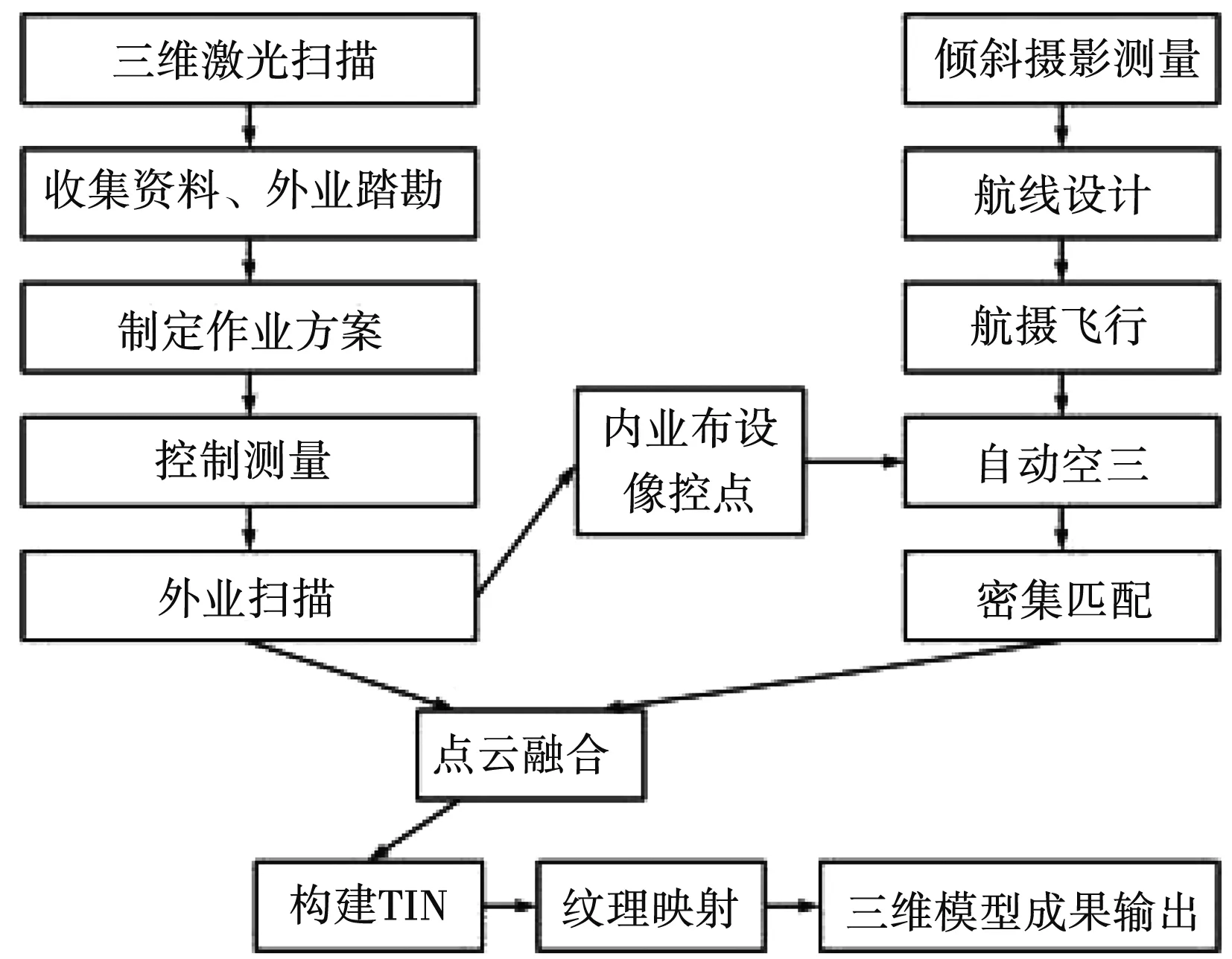
图1 基于激光扫描技术与倾斜摄影测量技术 融合建模的技术路线Fig.1 Technical route based on laser scanning technology and tilt photogrammetry technology fusion modeling

图2 RTK-SLAMTM三维激光扫描仪系统组成示意图Fig.2 RTK-SLAMTM 3D laser scanning system composition
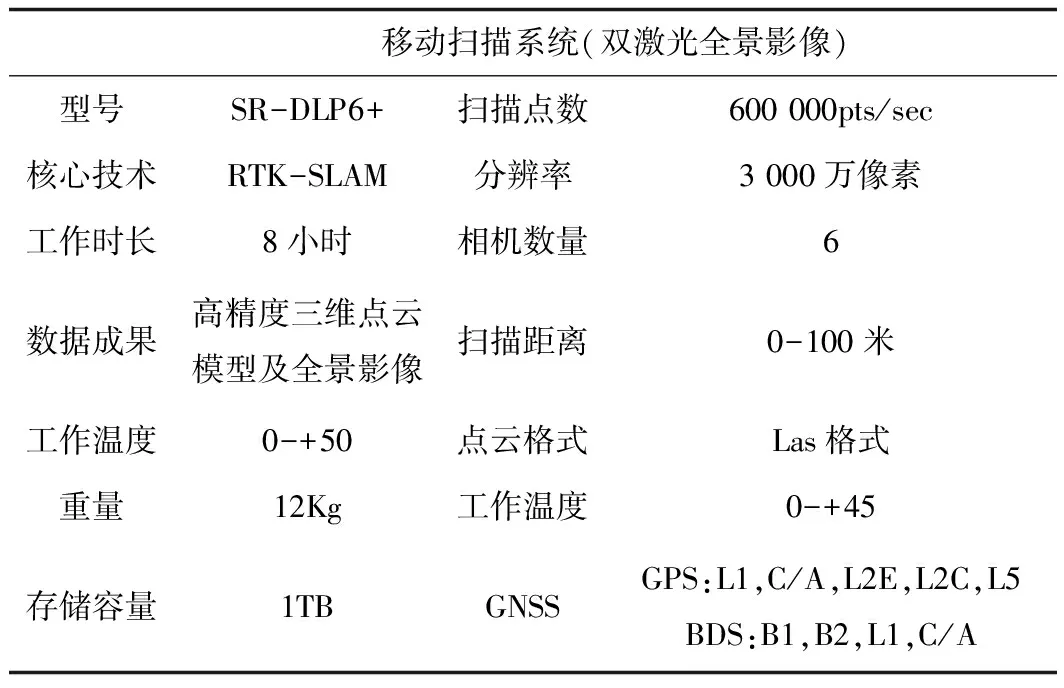
表1 RTK-SLAMTM扫描系统主要参数Tab.1 Main parameters of RTK-SLAMTM scanning system
大疆精灵4 RTK无人机航测系统主要由飞行平台、传感器系统、飞行控制系统、地面监控系统、数据传输系统组成[2],如图3所示。平台参数和相机参数如表2、表3所示。
1.3 融合建模实施
1.3.1 测区概况
本次实验测区为甘肃林业职业技术学院校园内部,如图4所示。主要包括道路、建筑物、林地、操场、草地等地物,地势较为平坦,后山园林实验园地势起伏较大。

图3 大疆精灵4ro无人机Fig.3 Dajiang phantom 4ro UVA

表2 大疆精灵4RTK无人机平台参数Tab.2 Parameters of Dajiang phantom 4RTK UVA platform

表3 大疆精灵4RTK无人机相机参数Tab.3 Parameters of Dajiang phantom 4RTK UVA camera

图4 甘肃林业职业技术学院校区Fig.4 Gansu Forestry Polytechnic campus
1.3.2 操作流程
1.3.2.1 负式移动扫描系统数据采集
使用背负式移动扫描系统进行数据采集,内业由Omini SLAM Mapper软件进行点云配准,得到测区点云模型,如图5所示。具体操作流程路线如图6所示。

图5 彩色点云数据Fig.5 Cloud point cloud data
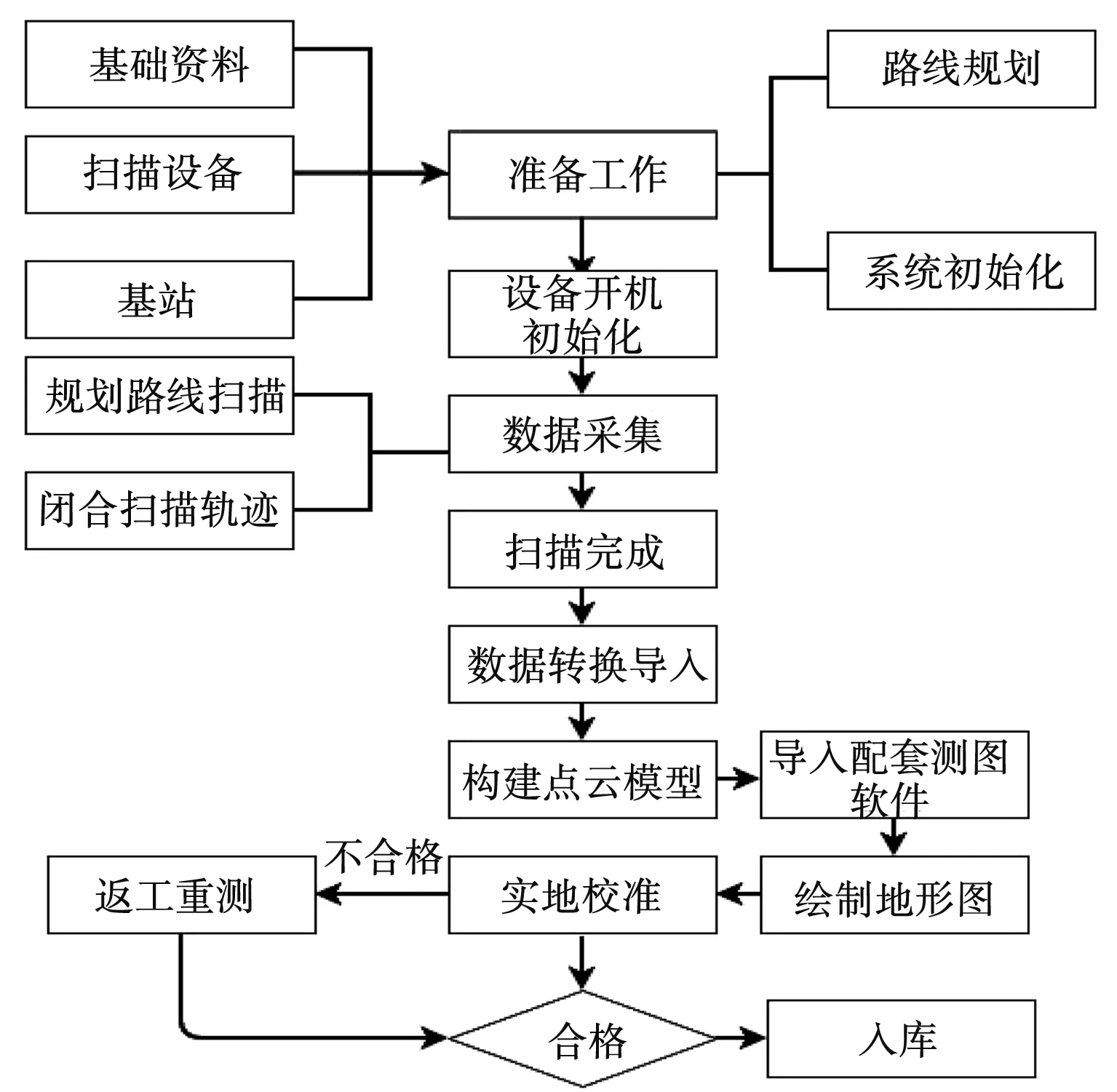
图6 移动扫描系统作业流程Fig.6 Mobile scanning system workflow
1.3.2.2 倾斜摄影数据采集
测区采用大疆精灵4 RTK无人机进行外业影像数据的获取,其航摄技术流程如图7所示。测区航摄技术参数见表4。
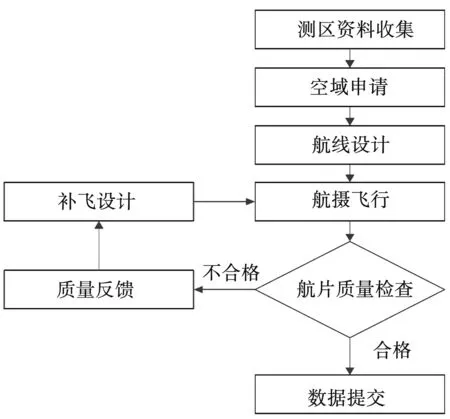
图7 无人机外业航摄技术流程Fig.7 Technical process of UAV field aerial photography

表4 无人机航摄技术参数Tab.4 Technical parameters of UAV aerial photography
1.3.2.3 内业数据处理
影像匀光匀色处理。为了使航摄的影像避免出现云、雾遮挡,更加自然,必须进行影像的匀光匀色处理,如亮度调整、对比度和色彩调整,使影像色彩更加均匀,与测区真实场景更加吻合[3]。经匀光匀色处理前后的影像对比,如图8所示。
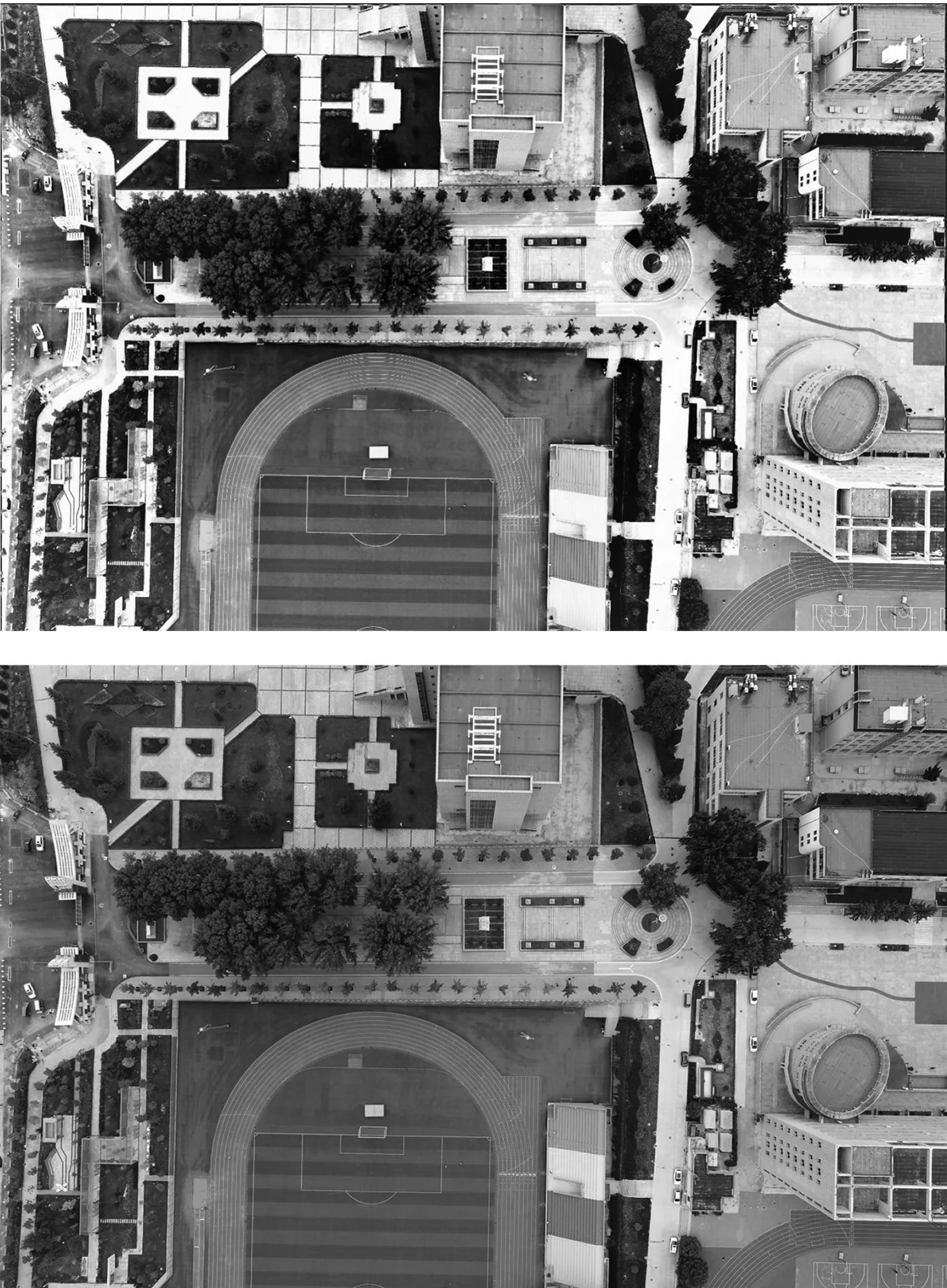
图8 影像匀光匀色对比Fig.8 Comparison of image uniformity of light and color
基于Context Capture的倾斜数据处理。
a.导入影像。打开Context Capture软件,新建工程,输入名称,设置工程保存路径,导入影像及POS数据。
b.空中三角测量。在概要选项卡中选择空中三角测量,参数默认提交,在Context Capture Engine引擎端进行空三计算,包括特征点提取、多视影像匹配及光束法局域网平差等[4]。计算完成后,得到测区大量密集点云数据,如图9所示。
c.数据融合。通过倾斜影像密集匹配出来的点云数据与背负三维激光扫描获取的激光点云数据进行“空地融合”,在融合前要确保数据格式为*.Las,保证数据格式的一致性[5]。由于扫描的激光点云数据精度远高于倾斜影像匹配的点云数据精度,所以,以三维激光点云作为双方数据配准融合基准,采用迭代最邻近点配准并结合人工配准方法[6]可实现两者数据的融合,得到高精度的融合点云模型。

图9 空中三角测量点云数据Fig.9 Airborne triangulation point cloud data
d.模型建立及结果分析。在Context Capture系统中将融合的点云数据基于瓦片技术进行三维重建,生成三维不规则三角网,如图10所示。建立的白膜三维模型如图11所示。将模型的纹理信息与三维TIN模型经过高精度的配准,得到基于真实纹理影像的实景三维模型,如图12、13所示。
通过对比单纯的无人机倾斜摄影三维模型(图14)和数据融合后的三维模型(图15)可以直观看出融合后的三维模型墙面更加平整,纹理清晰,底部拉花得到改善,模型效果极大优化。
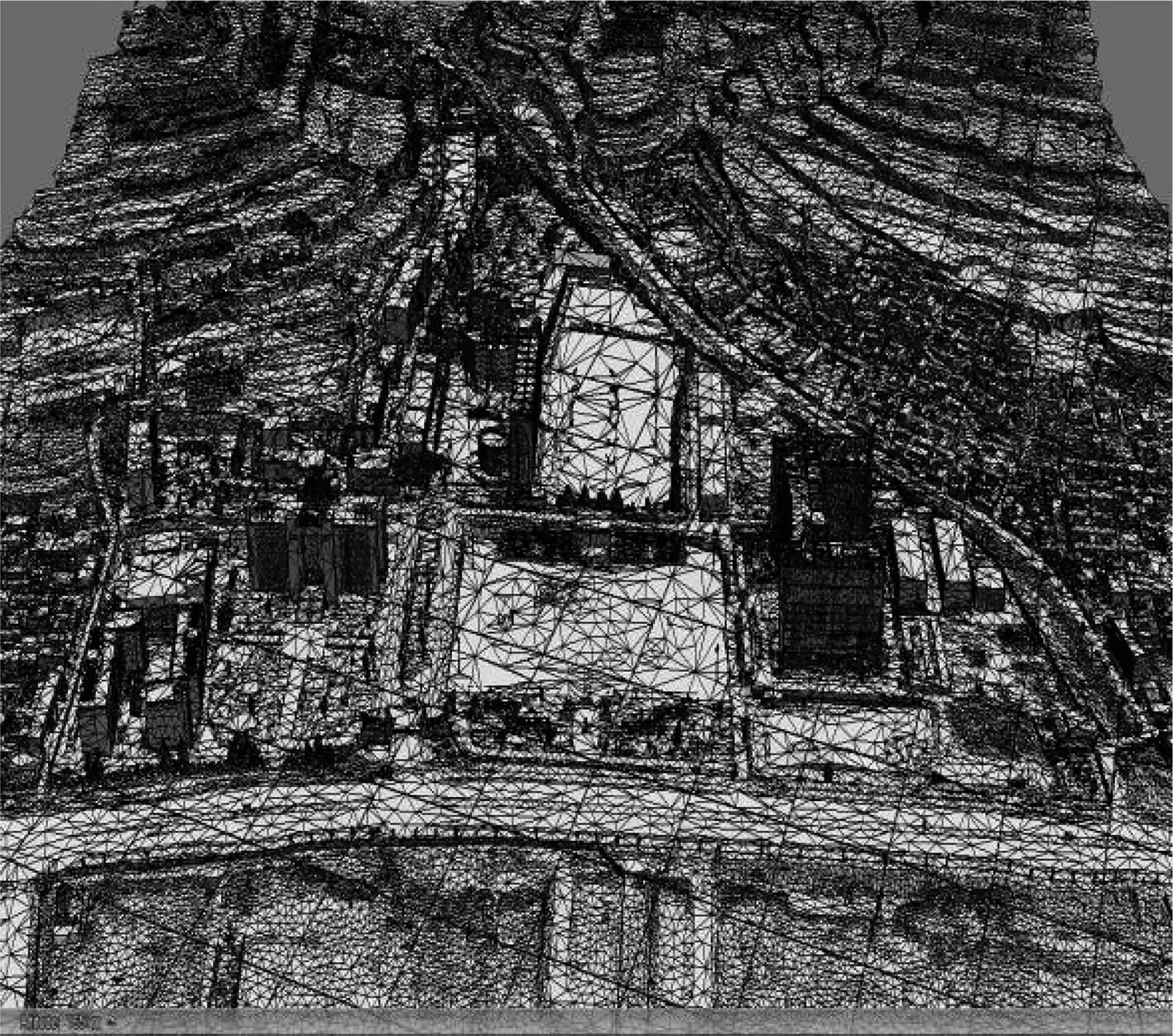
图10 局部白模型Fig.10 Local whiteness model

图11 局部白模型+三角网Fig.11 Local whiteness model+triangulation network

图12 局部三维模型Fig.12 Local 3D model

图13 局部三维模型+三角网Fig.13 Local 3D model+triangulation network
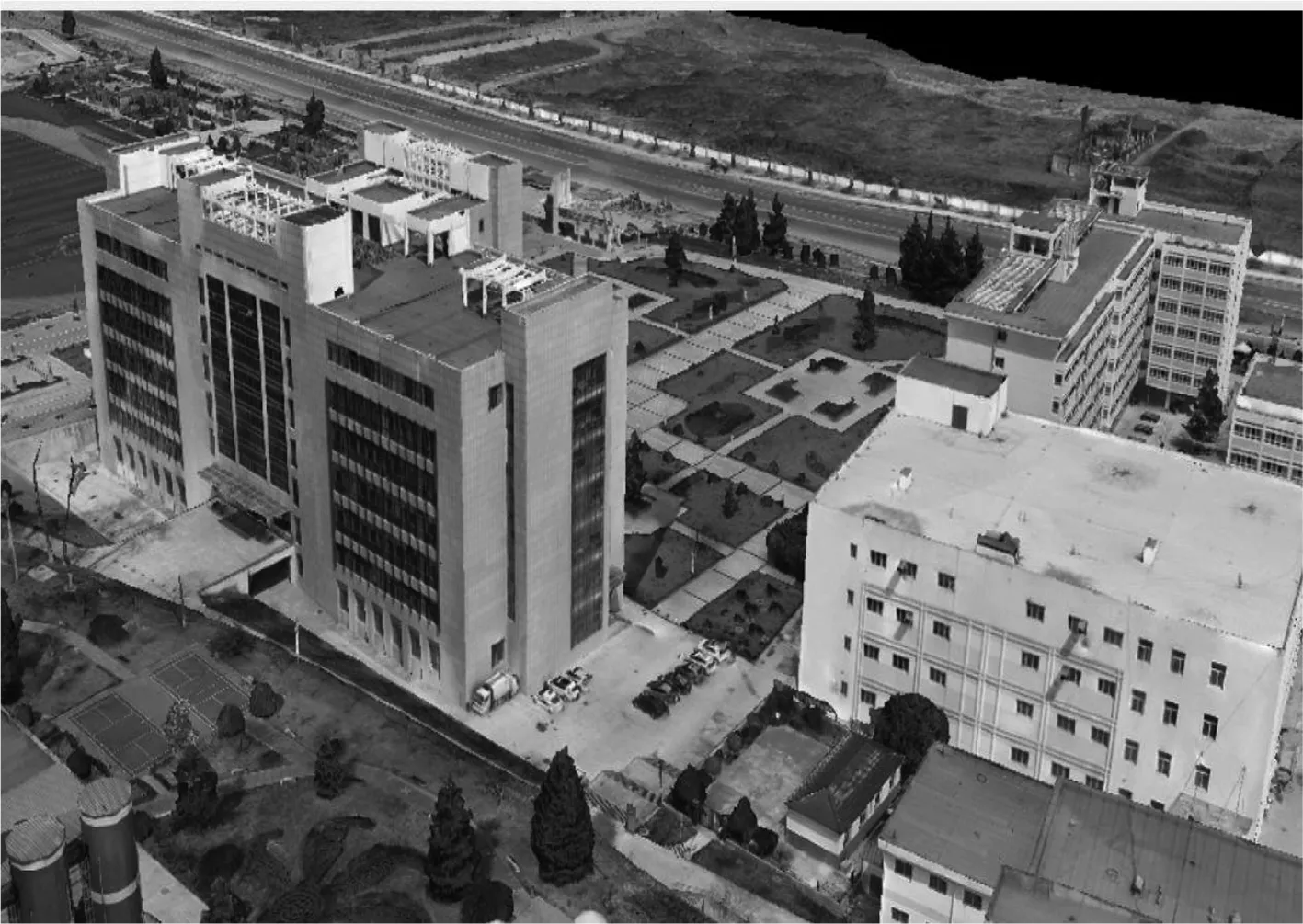
图14 无人机倾斜摄影三维建模成果Fig.14 Results of UAV oblique photography 3D modeling
EPS生产数字线划图。通过对数据融合后构建的三维实景模型在EPS中的“裸眼”识别,依据数字测图规程对地形要素进行采集,生产出1:500大比例尺校园地形图,如图16所示。
图16 校园1:500地形图Fig.16 Campus 1:500 topographic map
2 精度评定
为验证两种技术融合构建三维实景模型的有效性,测区内选择了50个检查点,外业通过GPS-RTK的方式实测检查点的三维坐标,内业将模型导入EPS获取检查点的坐标。分别计算出融合建模与同条件下单一三维激光扫描建模和单一倾斜摄影建模的平面中误差和高程中误差,进行精度对比分析[7]。具体数据如表5所示。
为验证空地数据融合建模编绘的校园地形图精度是否满足1∶500大比例尺成图精度要求,在测区内选取50个明显地物特征点,外业利用GPS-RTK的实测坐标,内业在线划图上查询坐标,分别计算出平面点位误差和高程误差,其数据如表6和表7所示。

表5 同等条件下三种建模方法精度对比Tab.5 Comparison of accuracy of three modeling methods under the same conditions

表6 1∶500校园地形图平面点位误差Tab.6 1∶500 campus topographic map plane point error

表7 1∶500校园地形图高程误差Tab.7 1∶500 campus topographic map elevation error
通过上表数据可以得出,依据测量规范精度要求,对于数据融合建模编绘的地形图满足1:500大比例尺地形图平面精度与高程精度的要求,且精度较高。
3 结语
针对单一三维建模各自的优劣势,提出将地面三维激光扫描技术和空中倾斜摄影测量技术相结合,实现数据的“空地联合”,应用该技术实现校园三维建模和测制大比例尺地形图。实验表明,数据融合建模精度更加均匀可靠,纹理更加清晰,可免除外业像控测量,降低外业劳动强度,提高作业效率。利用融合建模测制大比例尺地形图可满足精度要求,验证了“空地联合”建模方法的有效性。