末敏子弹稳态扫描阶段运动特性研究
2022-06-09岳明凯王程远焦志刚
岳明凯,王程远 ,焦志刚,陈 伟
(1.沈阳理工大学 装备工程学院,沈阳 110159;2.辽沈工业集团有限公司,沈阳 110045)
坦克装甲车辆在现代地面战争中占据主导地位,反装甲任务日益加重,而具有较高效费比的末敏弹可以有效毁伤装甲目标[1-3]。
末敏子弹工作时以母弹为载体抵达目标上空,在规定高度从母弹中抛出,经过减速减旋后,张开主旋伞,并继续减速,直到达到稳定状态,此时伞-弹系统一边匀速下降,一边绕铅垂线匀速旋转[4],达到末敏子弹扫描、识别目标的要求。
末敏子弹的伞-弹系统具有复杂的动力学特性,一直以来都是末敏弹稳态扫描运动特性研究的重点,其稳态扫描运动对末敏子弹识别、命中目标起到决定性作用[5-6]。张俊等[7]在牛顿力系下建立了伞-弹系统的运动模型,分析了各弹道诸元的变化规律;董严等[8]忽略了伞-弹间滚转运动的自由度,使用拉格朗日力学方法建立了伞-弹系统平面内运动模型;马宗成等[9]将伞与伞盘视为一个刚体,子弹视为另一个刚体,建立了伞-弹二刚体动力学模型。在伞-弹系统二刚体动力学模型中,通过球铰链连接的约束未必能符合其连接机构及约束类型,并且在二刚体模型中忽略了伞盘的运动情况。因此,为进一步准确描述末敏子弹稳态扫描阶段的运动状态,建立柱铰连接的伞-弹三刚体动力学模型十分必要。
本文将伞、伞盘、弹体视为刚体,伞盘与弹体之间通过柱铰连接,基于第二类拉格朗日力学方法推导出伞-弹系统稳态扫描阶段动力学方程组,并使用Adams软件进行仿真,验证伞-弹系统动力学模型的准确性。
1 末敏子弹稳态扫描阶段伞-弹系统模型
1.1 拉格朗日力学方程
本文采用第二类拉格朗日力学方程分析伞-弹系统运动特性,其方程为
(1)
(2)
(3)
式中:T为系统的动能;t为时间;qk为系统的广义坐标;Q为系统的广义力;k为系统自由度个数;n为组成系统的刚体个数;s为系统完整约束的个数;W为主动力所做的虚功;mi为质点i的质量;vi为质点i的速度;Ji为质点i的转动惯量;ωi为质点i的转动角速度。
1.2 模型假设
本文将伞-弹系统简化为弹体、伞盘和伞系统(伞和伞绳)三部分,并作如下假设:
(1)忽略主旋伞张开过程;
(2)将伞、伞盘、弹体视为刚体;
(3)伞与伞盘为球铰连接,伞盘与弹体为柱铰连接;
(4)忽略伞绳拉力及附加质量;
(5)稳态扫描阶段伞-弹系统速度较低,故忽略弹体和伞盘的空气动力影响。
1.3 伞-弹系统动力学模型
1.3.1 坐标系定义及广义坐标选取
为方便分析伞-弹系统的运动规律,建立如下坐标系。
(1)基准坐标系O-XYZ
抛撒点为坐标原点O,OZ轴铅垂向上,OY轴沿水平方向指向射向,OX轴由右手法则确定。该坐标系用于确定伞、伞盘和弹体的质心坐标。
(2)平动坐标系Oi-XiYiZi
原点Oi取刚体i质心Ci处,各轴方向同基准坐标系。该坐标系用于确定伞轴、伞盘轴、弹轴和速度方向。

选取伞盘与弹体的连接点D的坐标(x,y,z)、主旋转伞的空间姿态角(θ,ψ,φ)、伞盘的空间姿态角(θ2,ψ2,φ2)以及弹体坐标系相对于伞盘坐标系转动的角度θd作为广义坐标,即k=10,q=(x,y,z,θ,ψ,φ,θ2,ψ2,φ2,θd) 。伞-弹系统结构如图1所示,图中la为伞绳长度,lc为子弹弹长,CA为主旋伞质心。

图1 伞-弹系统结构示意图
1.3.2 系统动能
将伞刚体质心坐标系平移到连接点D,则伞刚体质心坐标表示为(0,0,la)。通过坐标转换关系,可得到伞刚体的质心在基准坐标系下的坐标为
(4)
将式(4)对时间t求导,可得到伞刚体质心速度为
(5)
伞刚体角速度为
(6)
伞盘刚体质心坐标可认为与连接点D重合,故伞盘刚体质心坐标表示为(0,0,0)。伞盘刚体质心速度为
(7)
伞盘刚体角速度为
(8)
(9)
将式(9)对时间t求导,可得到子弹刚体质心速度为


(10)
同理可求得vcy和vcz。
子弹刚体角速度为
(11)
将式(4)~(11)带入式(3)可得到各刚体的动能,因此末敏子弹稳态扫描阶段的系统动能为
T=Ta+Tb+Tc
(12)
式中:T为伞-弹系统动能;Ta为主旋伞动能;Tb为伞盘动能;Tc为子弹动能。
1.3.3 系统广义力
作用在伞-弹系统上的力和力矩包括
G=mg
(13)
(14)
(15)
(16)
(17)
(18)
(19)

为区别于实位移,虚位移采用变分符号表示。伞-弹系统在x、y、z方向的虚位移可分别表示为δx、δy、δz,主旋转伞、伞盘及弹体的空间旋转角表示为δθ、δψ、δφ、δθ2、δψ2、δφ2、δθd。则伞-弹系统虚功为
∑δW=∑Fδq
(20)
式中F为作用在系统上的主动力。
以广义坐标θd为例,将式(20)带入式(2)可得系统广义力为
Qθd=θd(Mdycosθd+Mdzsinθd)-Mdzcosθd+
Mdysinθd
(21)
同理可将其他广义坐标带入第二类拉格朗日力学方程,求解得到末敏子弹稳态扫描阶段的动力学模型为
(22)
式中Ek、Fk、Gk、Hk为由拉格朗日力学方程求出的系数矩阵。
2 仿真计算及分析
本文基于拉格朗日力学方法,建立末敏子弹伞-弹系统三刚体动力学模型。为验证模型的准确性,在SolidWorks中建立伞-弹系统三维模型,并将其导入Adams软件中,设置刚体质量、材料、初速等参数,根据各刚体之间的接触和相互运动关系设置链接副与运动副,并添加广义力。在Adams软件中,设置好约束、接触、链接副和运动副的伞-弹系统模型如图2所示。

图2 Adams前处理设定完成模型图
计算中各参数取值为:伞质量ma=0.46kg;主旋伞特征面积S=1.77m2;伞特征长度l=0.8m;伞绳长度la=1.2m;伞盘质量mb=0.1kg;弹体质量mc=10.85kg;弹长lc=0.225m;初始下落速度v=50m/s;静悬挂角θ0=22.5°。仿真得到末敏子弹速度随时间的变化如图3所示,末敏子弹高度随时间的变化如图4所示,末敏子弹转速随时间的变化如图5所示,末敏子弹扫描角度随时间的变化如图6所示。

图3 伞-弹系统速度随时间变化曲线
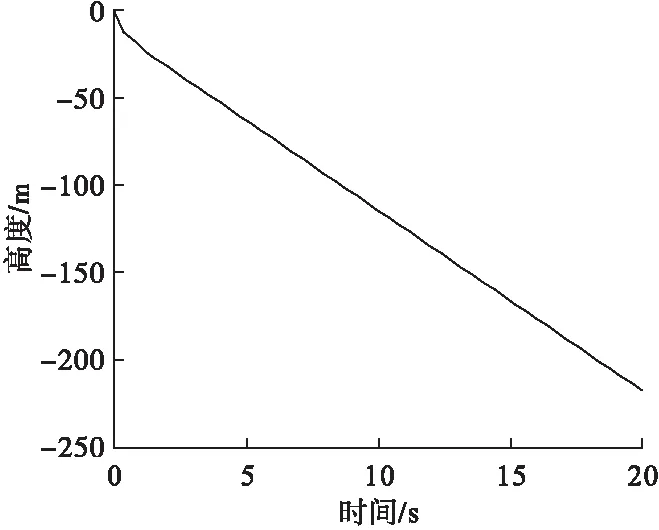
图4 伞-弹系统高度随时间变化曲线
由图3可见,伞-弹系统在主旋转伞张开后,速度迅速降低,经过3.6s后,系统重力、空气阻力、空气升力达到平衡状态,系统加速度降为零,此时系统匀速下降,落速稳定于10.29m/s。
由图4可见,伞-弹系统在20s内高度下降了217m,且在伞-弹系统落速稳定后,系统下降高度和时间成正比。

图5 伞-弹系统转速随时间变化曲线
由图5可见,在空气导转力矩的作用下,伞-弹系统转速在初始0.4s内迅速增大至7.7r/s,之后受伞极阻尼力矩的影响,转速开始下降,在4.4s稳定于4.04r/s。相较于系统落速,系统转速进入稳定状态多用时0.8s,这是由于伞极阻尼力矩和空气导转力矩均与速度有关,只有在下落速度达到稳定状态以后,转速才会逐渐达到稳定状态。
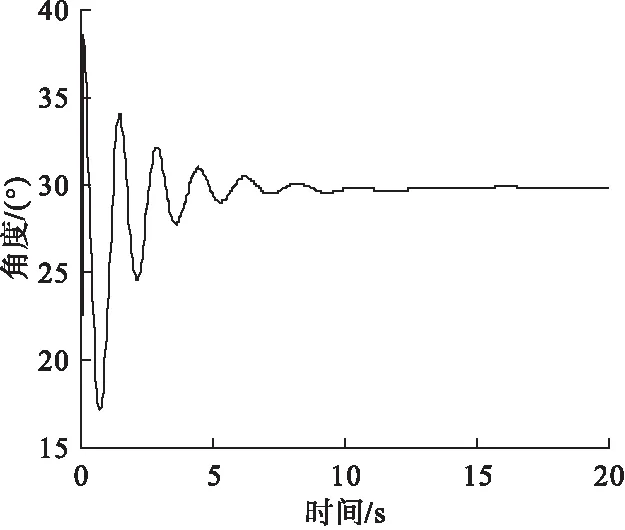
图6 伞-弹系统扫描角度随时间变化曲线
由图6可见,系统扫描角度在初始阶段波动较大,经过5s后波动减小并逐渐趋于稳定,最终在 7.5s左右稳定于29.8°左右。这是由于弹体与伞盘之间为柱铰连接,存在摆动自由度,落速及转速变化会使弹体发生摆动,在主旋转伞张开后,系统落速及转速变化较大,故系统扫描角度波动也较大,当系统速度和转速稳定后,扫描角最终进入稳定扫描状态。
伞-弹系统稳态扫描阶段的下落速度一般为10~20m/s、转速为4~10r/s[10],故仿真结果与实际情况相符,建立的动力学模型准确可靠。
3 结论
采用第二类拉格朗日力学方法,建立了伞-弹系统三刚体动力学模型,并使用Adams软件进行仿真,得到以下结论:
(1)在主旋转伞完全张开后,伞-弹系统的下落速度在3.6s后稳定于10.29m/s,转速在空气导转力矩的作用下,先迅速增大至7.7r/s,随后由于伞极阻尼力矩的影响在4.4s稳定于4.04r/s,扫描角进入稳定状态用时最长,在6s稳定于29.8°,20s内系统高度下降217m,符合末敏子弹稳态扫描阶段的运动规律;
(2)在由伞、伞盘、弹体构成的三刚体模型中,伞与伞盘之间采用球铰连接、伞盘与弹体之间采用柱铰连接,与传统拉格朗日力学方法相比,考虑了伞盘的运动特性,提高了伞-弹系统稳态扫描阶段动力学模型的准确性。
