A*算法在移动机器人路径规划中的研究
2022-06-08高永平龙江腾
鲁 毅,高永平,龙江腾
(东华理工大学 信息工程学院,江西 南昌 330013)
0 引言
随着工业化社会的发展,货物的搬运和输送成为重要的问题,其中移动机器人技术得到了极大的关注[1],移动机器人技术可以极大地提高货物的运输能力,使得货物的运输更加的自动化,而在移动机器人技术中,机器人路径规划算法[2]一直是研究重点,路径规划算法有Dijkstra算法[3],BFS算法[4],A*算法[5]等,Dijkstra算法可以搜索到一条最优路径,但是搜索效率太低,BFS算法搜索效率很高,但是不一定能搜索到一条最优路径,A*算法结合了Dijkstra算法和BFS算法的优点[6],但是也存在一些缺点,因此,本文提出改进A*算法,既能寻找到一条最优路径,而且搜索效率也比较高。
1 传统寻路算法
1.1 Dijkstra算法
Dijkstra(迪杰斯特拉)算法是典型的单源最短路径算法[7],用于计算从起点到其他各顶点的最短距离。主要是从起点开始不断向外搜索,直到搜索到终点结束。算法原理:假设一个带权有向图G,将其分成A,B两个集合,其中A集合中存放的是已访问顶点和其最短路径值,B集合中存放的是未访问的顶点,算法步骤如下:
1)初始时,将起点S放在集合A中,集合B中存放其他所有顶点和起点S到其他顶点的距离。
2)从集合B中选取到起点S的最短距离的顶点a,并将顶点a加入到集合A中,同时从集合B中删除顶点a.
3)以顶点a为中间点,更新集合B中各个顶点到起点S的距离。
4)循环执行步骤2和3,直到遍历完图中所有的顶点为止。
Dijkstra算法是一种盲目式搜索算法,所以搜索效率较低,对于n个节点的图,计算起点到其他各节点的最短距离,算法的时间复杂度为O(n2),因此,在大型地图中寻路效率比较低。算法流程图如图1所示。

图1 Dijkstra算法基本流程
1.2 最佳优先搜索算法
最佳优先搜索算法是一种启发式搜索算法[8],是在广度优先算法的基础上形成的,该算法使用了估价函数,利用估价函数计算当前节点到目标节点的估价值,然后选择估价值最小的节点进行访问,直到搜索到目标节点为止。最佳优先搜索算法(BFS)不能保证找到的路径是一条最短路径,但是其计算过程相对于Dijkstra算法会快很多。
算法实现需要两个列表,A列表和B列表,A列表中是将要被访问的节点,B列表中是已被访问的节点,算法步骤如下:
1)初始时,将起点放入到A列表中,B列表为空;
2)从A列表中选取估价值最小的节点k,并对k的所有子节点m进行如下操作:
如果m子节点不在A列表和B列表中时,将m子节点加入到A列表中,并计算出m的估价值,并对A列表中的节点依据估价值进行排序。
如果m节点在A列表中,重新计算m节点的估价值,并将该估价值和A列表中m的估价值进行比较,如果小于A列表中的估价值,则将A列表中的估价值进行替换,并且对A列表重新排序。
如果m在B列表中,重新计算m节点的估价值,并将其和B列表中m节点的估价值进行比较,如果小于B列表中m的估价值,则将m从B列表中删除,并加入到A列表中,然后对A列表中的节点进行排序。
3)将节点k从A列表中删除,并加入到B列表中。
4)循环执行上述步骤,直到搜索到目标节点或者A列表为空为止。
最佳优先搜索算法在搜索路径的过程中效率极高,但是最佳优先搜索算法只考虑了当前点到目标点的估计值,没有考虑起点到当前点的成本值,因此不一定能够搜索到一条最优路径。
2 传统A*算法
A*(A-Star)算法是一种效率高且能搜索到最优路径的算法[9]。有许多的寻路算法都是在A*算法的基础上形成的,例如D*算法[10]和NavMesh导航算法[11],该算法利用了启发函数的特性,使用启发函数计算出当前点的估价值,利用估价值来选取最优节点,最终搜索出一条最优路径。
A*算法结合了Dijkstra算法和最佳优先搜索算法的优势[12],它在一定程度上保留了Dijkstra 算法搜索最短路径的能力,又引入了最佳优先搜索算法的贪婪策略,防止了算法盲目的搜索,组合成了一个融合性的评价函数,评价函数为:
F(n)=G(n)+H(n)
(1)
式(1)中,n为当前节点,F(n)是从起始节点到目标节点的估计值,G(n)是起始节点到当前节点的实际值,H(n)是当前节点到目标节点的估计值,也称为启发函数,启发函数的计算有多种,如曼哈顿距离、欧几里得距离、对角线距离等。本文启发函数采用曼哈顿距离[13],即为:
H(n)=|x1-x2|+|y1-y2|
(2)
式(2)中,(x1,x2)是当前节点的坐标,(y1,y2)是目标节点的坐标。
A*算法就是利用估价函数来对每一个节点进行评估,得到估价最优的节点,再从这个节点继续搜索直到目标点。通过启发式搜索,可以避免搜索大量的无用节点,极大地提高了搜索效率。算法步骤如下:
1)首先创建两个空表open列表和close列表,定义起始节点为S,目标节点为K.
2)将起始节点S加入到open列表中。
3)寻找open列表中f值最小的节点a作为当前节点,若节点a是目标节点,则找到路径,退出循环,若不是,则继续下一步。
4)把当前节点a从open列表中删除并放入到close列表中,对节点a所有相邻节点进行如下判断:
a)如果相邻节点不在open列表和close列表中,将此节点添加到open列表中,用当前节点a作为该节点的父节点,并计算该节点的f值;
b)如果相邻节点已在open列表中,则再次计算该节点的f值,如果新f值小于旧f值,则用新f值替代旧f值,同时将该节点的父节点改为当前节点a;
c)如果相邻节点已在close列表中,则忽略该节点;
重复执行步骤3)和4),若当前节点是目标节点或者open列表为空,则结束循环。
3 改进A*算法
3.1 启发函数的优化
启发函数在A*算法中具有导引作用,能够指引A*算法搜索到一条更好的路径,但是传统的启发函数存在一些效率低的问题,因此对启发函数做一些优化,改进后的启发函数为:
F(n)=G(n)+W(n)*H(n)
(3)
式(3)中,W(n)是启发函数H(n)的权重系数,添加这个权重系数可以使得启发函数的搜索效率更高,在远离目标点时,W(n)的权重系数比较大,这样可以加速算法向目标点搜索,在靠近目标点的时候,W(n)的权重系数较小,这样可以使算法搜索的路径更加的精确,通过使用优化的启发函数可以极大地提高机器人路径规划的效率。
3.2 双向搜索A*算法
双向搜索A*算法是在传统A*算法的基础上进行改进的,传统的A*算法是从起点开始搜索到终点,搜索效率比较低,双向搜索A*算法是同时从起点和终点开始搜索,即从起点向终点进行搜索,同时从终点向起点进行搜索,直到两边搜索点相交,结束搜索。双向搜索A*算法的搜索效率比较高,可以极大缩短搜索路径时间,算法步骤如下:
1)首先创建正向open表和close表,反向open表和close表,将起点S放入正向open表中,终点K放入反向open表中,同时从两端进行搜索。
2)分别从正向open表和反向open表中选取F值最小的节点作为各自的当前节点,并将其加入到各自的close表中。
3)对各自当前节点的相邻节点进行操作,若相邻节点不在open表中,则将其加入到各自的open表中,并把当前节点作为其父节点,若相邻节点在open表中,则比较其当前的F值和open表中的F值,若小于open表中的F值,则用当前F值替换open表中的F值,并将其父节点更换为当前节点,若相邻节点为障碍物或者在close表中,则跳过该节点。
4)重复循环步骤2)和3),当正向open表和反向open表为空时,表示无路径,退出循环,或者双向搜索出现交集点,表示找到路径,算法结束。
双向搜索A*算法从路径的两端开始搜索,相比于传统A*算法极大地提高了路径搜索效率。算法流程图如图2所示。

图2 改进A*算法基本流程
4 仿真结果和分析
4.1 仿真环境
为验证本文所提A*算法的有效性,采用仿真软件平台MATLAB R2020b进行仿真实验,构建20*20的栅格地图,如图3所示,图中的红色圆圈代表起点,空心方格代表终点,实心黑色方格代表障碍物。
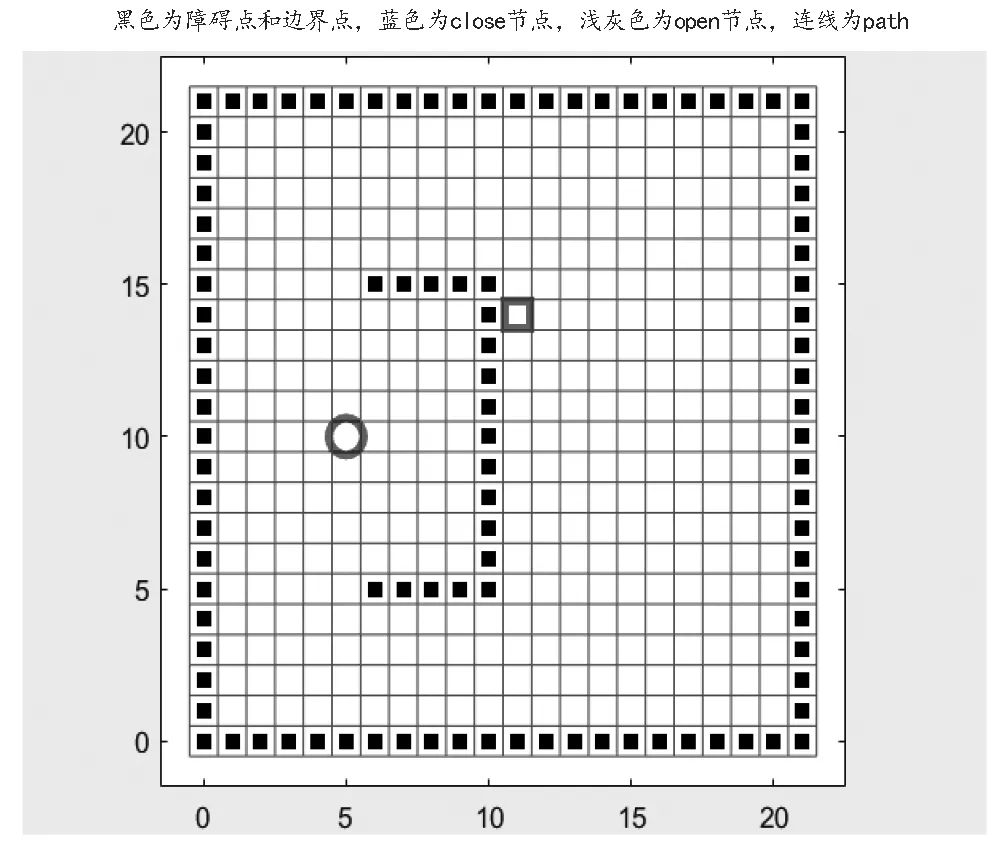
图3 20*20栅格地图
4.2 实验分析
为了对四种算法进行比较分析,采用了两种类型的地图,分别使用四种算法在两种地图上进行路径规划,两种地图路径规划的结果如图4,5所示,同时对比四种算法在两种不同地图上的路径长度,搜索节点数和搜索时间,结果如表1所示。
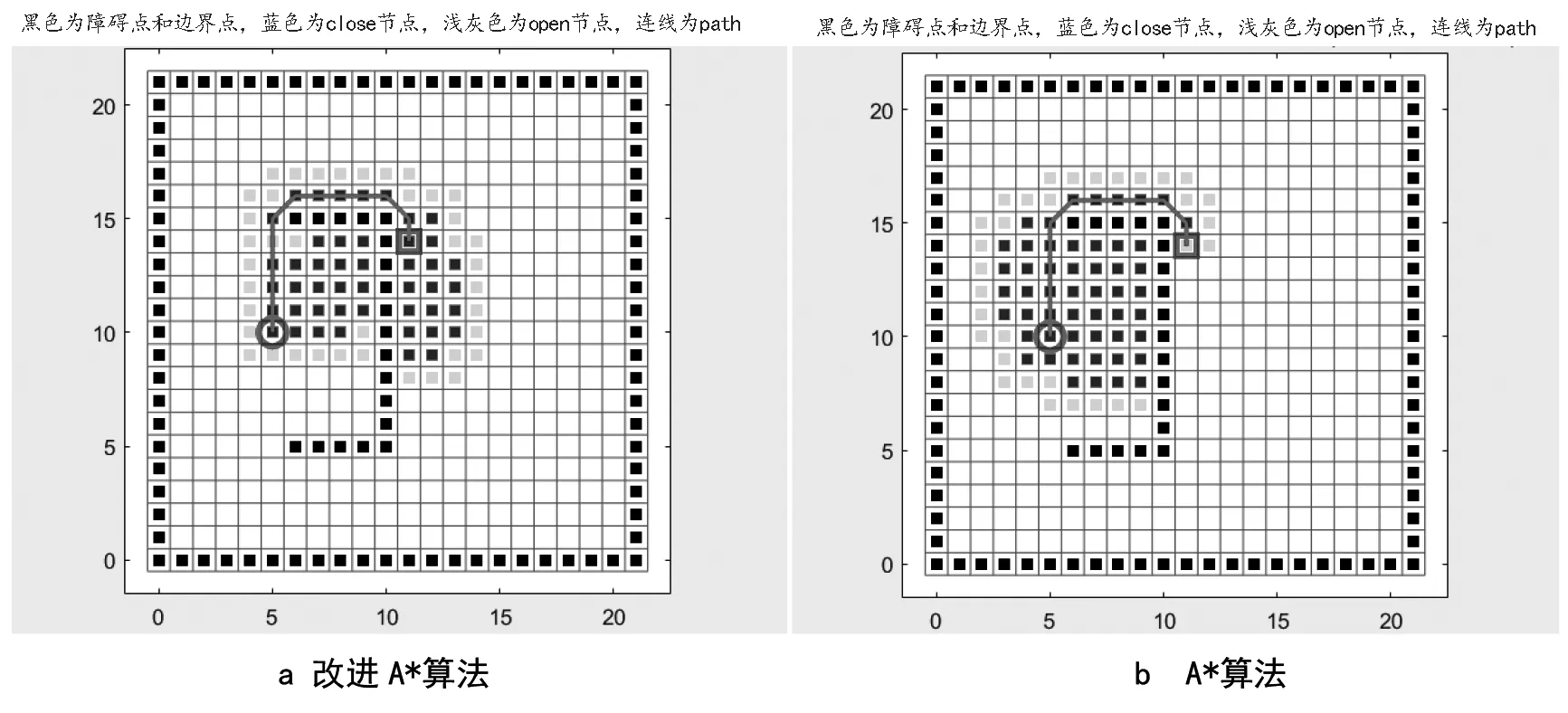
图4 地图1中四种算法路径规划结果

表1 四种算法实验数据对比
由表1可知,在地图1中,改进A*算法比传统A*算法的搜索时间减少了1.71s,搜索效率提高了14.83%,改进A*算法比BFS算法的路径长度减少了30.71m,路径长度减少了19.32%,改进A*算法比Dijkstra算法的搜索时间减少了80.05s,搜索效率提高了89.07%,搜索节点数比Dijkstra算法减少了128个,减少率达58.45%.在地图2中,改进A*算法比传统A*算法的搜索时间减少了6.08s,搜索效率提高了24.95%,搜索节点数比传统A*算法减少了13个,减少率达9.28%,改进A*算法比BFS算法的路径长度减少了50.71m,路径长度减少了24.46%,改进A*算法比Dijkstra算法的搜索时间减少了192.53s,搜索效率提高了91.37%,搜索节点数比Dijkstra算法减少了217个,减少率达63.08%.因此,采用改进A*算法进行移动机器人路径规划,不仅搜索效率高,还可以得到一条最优的路径,极大地提高了移动机器人路径规划的性能。
图5 地图2中四种算法路径规划结果
5 结论
针对移动机器人路径规划问题,传统算法搜索效率低,搜索路径不一定为最优,本文采用了改进A*算法进行移动机器人路径规划,提出了优化启发函数,加快了算法的导向能力,采用双向搜索的方式,极大地提高了算法的搜索效率,通过仿真实验可知,改进A*算法在搜索效率上比传统A*算法和Dijkstra算法要高,在路径长度上比BFS算法要短,所以,采用改进A*算法能极大地提高移动机器人路径规划的性能,具有较大的应用前景。
