计及储能混合控制算法的微电网运行模式无缝切换控制策略研究
2022-06-08曹浪恒郑峰林祥群杨威
曹浪恒,郑峰,林祥群,杨威
(1.广东省电力设计研究院,广州 510663; 2.福州大学 电气工程与自动化学院,福州 350116; 3.武汉大学 电气与自动化学院,武汉 430072)
0 引 言
随着大规模间隙性、随机性分布式电源并入电网系统,储能装置在应对电网调峰调频、功率波动抑制以及分布式电源利用效能提升等方面的作用越发凸显,特别是当其作为微电网主控单元时,可快速平衡孤岛微电网供电需求,维持其电压、频率稳定运行。因此,储能单元控制技术优劣可在一定程度上决定微电网与大电网并、解列过渡过程的暂态性能[1-3]。
目前,储能作为主控单元主要利用自适应锁相环(PLL)、预同步以及虚拟同步电机等方法,实现微电网孤岛转并网时微电网电压与频率的快速稳定、内部能量供给平衡[4-8]。然而,在微电网并解列暂态过程中,若主控储能单元采用上述控制策略,不可避免的需要引入电网电压电流等外部信号,如果这些信号中存在着不良的扰动量,则并网逆变器的暂态性能也会遭到破坏。因此,为提高微电网并解列过渡过程的暂态性能,实现微电网并网与孤岛之间的无缝切换,需要研究相应策略来避免不良扰动量对储能单元控制层产生的危害。为消除有害扰动量对控制系统的影响,文献[9]通过在控制器中引入电压前馈项来消除外部有害扰动量对控制系统的影响。文献[10]通过在微网控制系统中引入惯性环节来减小有害扰动量的影响,但是同时也降低了系统的动态性能。文献[11]搭建出微网逆变器孤岛转并网状态下的动态优化数学模型,利用基于Radau配置的算法求出控制变量的最优控制轨迹。但是整个求解过程过于繁琐,实现难度较大。文献[12]为提高微电网的暂态稳定性能,引入了内模控制法,然而模式切换对微电网的控制层的影响没有得到完全解决。文献[13]利用直流环节电压作为反馈的控制回路,在非计划性故障下保证微电网并网转孤岛运行的可靠性。文献[14]提出了一种适用于储能逆变器的广义控制算法,利用广义控制结构避免了切换过程中的暂态振荡并且消除了有害扰动对控制系统的影响。但控制系统中的纯积分环节会放大谐波分量,并且多PI控制器也会降低控制系统的整体鲁棒性能。因此,设计一种结构简单、鲁棒性好的控制器来消除有害扰动量对控制系统的影响,确保储能电压、频率等电气量对控制系统参考值的快速跟踪,从而实现微电网在并/孤岛之间的无缝切换就显得十分必要。
为解决上述方法所含缺陷,文中提出一种计及储能并网逆变器的混合算法控制策略。该策略在LCL滤波器完全解耦的基础上,首次利用二自由度原理、电流预测控制模型构建逆变器控制层,实现控制层传递函数的单位化,使得控制层结构在微电网不同运行模式下保持一致,消除有害扰动量对控制系统的影响,避免运行模式切换过程中的暂态振荡。针对应用层设计,引入频率、电压作为反馈量改进传统下垂控制,保持孤岛微电网系统电压、频率的稳定,进而实现了微电网运行模式的无缝切换。
1 储能并网逆变器传统控制策略
接口逆变器控制系统可分为:应用层、控制层、硬件层[14]。储能单元的传统控制层的控制模式可分为电压源、电流源控制[15-19],其控制框图如图1所示,则电流源双环控制传递函数为:

图1 电流与电压双闭环控制框图
(1)
电压源双环控制传递函数为:
(2)

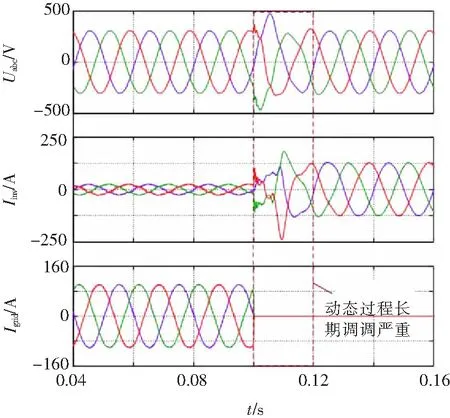
图2 传统控制策略硬切换仿真结果
2 储能系统控制层设计
为了消除微电网运行模式切换过程中的冲击电流与母线畸变电压,基于储能并网逆变器控制系统,并融合电流预测模型与二自由度原理,设计出一种适用于微电网不同运行模式下储能并网逆变器控制层共享结构,消除传统电流源与电压源模型下控制层的差异。将原有LCL滤波器分成LC、L两部分。其中,控制层主要结合LC部分进行控制。
2.1 电流预测模型控制
图3为储能并网逆变器LC部分的拓扑结构。

图3 并网逆变器LC部分
根据并网逆变器的拓扑结构,则其输出电压为[21]:
uin=Udc(Ta+gTb+g2Tc)
(3)
(4)
式中K=a,b,c。在αβ系下,逆变器Lin滤波器部分输出电流暂态关系可表示为:
(5)
式中iinα/β为逆变器输出电流;uinα/β为逆变器输出电压;ucα/β为逆变器Lin滤波器后输出电压。
模型预测主要是在每个周期中利用逆变器Lin滤波器输出电流暂态关系方程,构建系统数学模型,并且评估、融合当前时刻逆变器开关组合与上一时刻的状态信息,对未来时刻逆变器输出结果的预测作用。假定Ts为逆变器控制系统的采样周期,并对式(5)在(tk,tk+1)时间范围内离散化:
(6)
表1给出23种开关状态(G1~G8)对应于不同23种uα/β输出值。
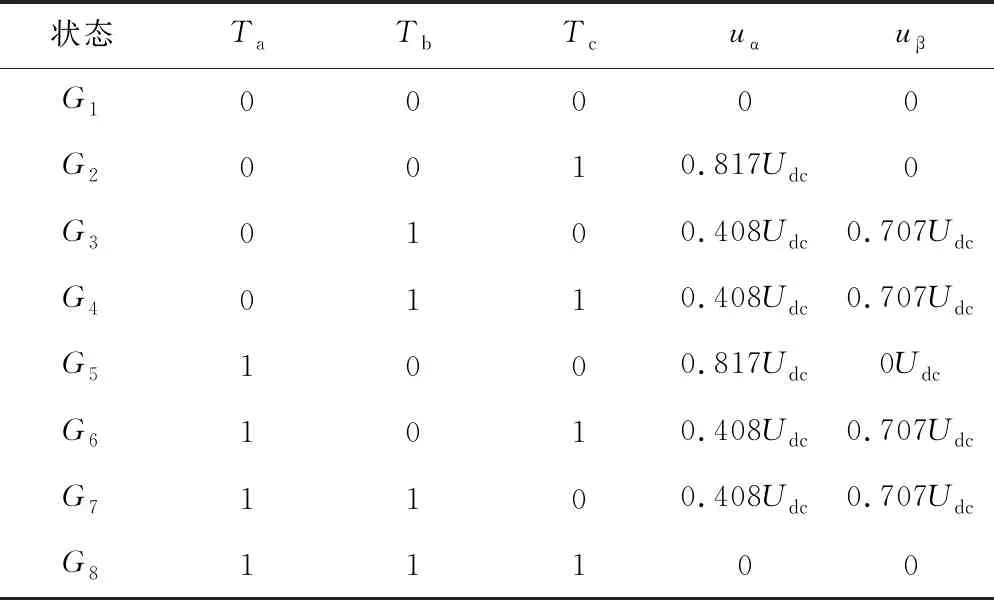
表1 开关状态与逆变器输出电压uα、uβ关系
若将k时刻此23种开关状态量代入式(5),可求得并网逆变器输出对应的23个电压矢量,再将23个电压矢量代入式(6),则可分别求取(k+1)时刻对应的23个并网逆变器输出电流值。若此时构建逆变器并网电流预测模型价值函数c:
(7)

2.2 预测模型失配稳定性分析
由于预测模型在参数设定时,与实际设备存在一定误差,若预测模型控制的电流误差收敛于[22]:
(8)
则认为所提算法的闭环系统是稳定的。式中,e、φ、ε分别为预测电流误差、量化误差矢量的上界、反电势矢量的估计误差。由于一般情况下RinTs/Lin≪1,则式(8)可简化为:
(9)
令逆变器侧电感值为Lin_real,根据式(6)、式(9),则k+1时刻逆变器输出电流的误差可定义为:
(10)
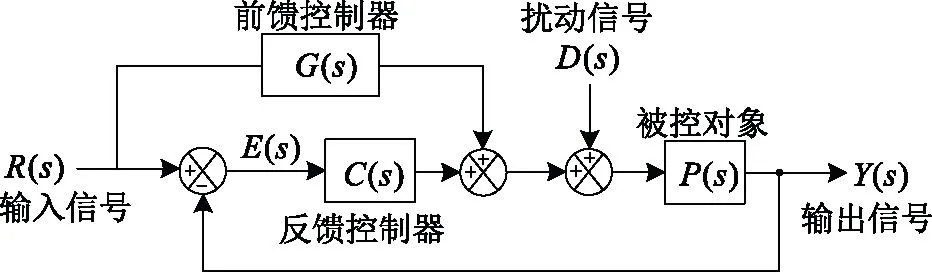
当Lin (11) 依据式(10)、式(11)可知,电流误差呈现衰减趋势,且随着时间增大,电流误差最终将收敛到下面的封闭集合内: (12) 从式(9)、式(12)可以看出,当Lin (13) 由式(13)可知,电流误差持续衰减,最终收敛于集合: (14) 因此,在Lin_freal 图4为输入前馈型二自由度控制系统的原理[23]。 图4 二自由度控制系统 根据图4可知,输入与输出、输入与误差间传递函数为: (15) 式中R(s)/Y(s)、C(s)、D(s)、P(s)、G(s)、E(s)分别是系统输入/输出、PI控制器、扰动信号、被控对象、前馈控制器、参考信号与系统实际输出信号间的误差。根据式(15)可知,通过G(s)可提高系统跟踪控制精度与动态响应速度;将E(s)引入反馈,则调节反馈控制器可以减小系统误差,保证系统的鲁棒性。若G(s)=[P(s)]-1,则: (16) 此时,即可实现Y(s) 完全跟踪R(s),并且能够消除控制器的带宽限制,同时还可通过调节C(s)来减小扰动信号D(s)对系统输出的影响。 (17) 由式(17)可知,当滤波器电容逆模型失配时,扰动项传递函数的极点位于左半平面,闭环系统的是稳定的。考虑到不同失配程度下扰动项的对系统的影响可能会不一样,根据式(17)绘制扰动项ic的幅值曲线。由图5可知,扰动项的增益呈现出衰减特性,幅值均在-15 dB以下。因此,控制系统在参量C失配时变化不大。同理,在滤波器电容电阻失配时,输入输出的传递函数为: (18) 由式(18)可绘制扰动项的幅值曲线,如图6所示,扰动项的幅值低于-100 dB。 图6 参量RC不同失配程度下扰动项幅值曲线 由图5和图6可知,滤波器电容和电阻的两种参量失配模型所对应扰动项在全频带范围内都呈现出衰减特性,因此模型失配对控制系统不会产生影响。 图7为储能系统控制层混合算法结构框图。 图7 控制层混合算法结构框图 从图7可知,该算法主要包含两部分:电压外环、电流内环。其中,电压外环主要基于二自由度PI控制系统,电流内环为电流预测模型系统。由于电流内环采用电流预测模型控制,则其传递函数可等效为: (19) (20) 图8 LC型逆变器及控制层混合算法控制框图 (21) 式中ku_p、ku_I分别为电压外环反馈控制器比例、积分增益。因此,通过上述设计的混合型算法,可使参考电压uc_ref与输出电压uc传递函数为1,消除输入与输出信号的带宽限制,实现其动态性能最优。 本节在原有LC控制部分基础上加入储能单元PQ与Vf控制的解耦阻抗(Rg+ jLg),使储能单元控制层能在微电网不同运行模式下作为共享层,而应对微电网运行模式不同时,只需调整储能单元应用层的控制目标即可。 图9给出储能单元基于混合型算法的PQ控制框图。 从图9可知,当微电网并网运行时,储能单元为PQ控制模式,其控制层输入参考电压为: 图9 并网模式下混合算法PQ控制框图 (22) 由于引入了up,所以电网电压与控制层中的up形成对消,二者的对消使得up中所含有害扰动量不对对系统造成影响。 若微电网孤岛运行时,储能单元采用传统下垂控制。其中,频率f与有功功率P、电压U与无功功率Q的下垂关系为: (23) 式中P0、Q0、f0、U0分别为储能系统输出的有功、无功、系统频率、交流母线电压。KP、KQ分别为P-f、Q-V下垂系数。但传统下垂控制为有差调节,面对系统负荷突增或突降时,频率、电压的偏移量将增大,不满足精密负荷对电能质量需求。因此,本小节将通过储能单元应用层引入微电网系统角频率及其电压,作为前馈补偿项,将其转为无差控制方式,则: (24) 图10 改进下垂控制器结构 为了验证所提控制方法的有效性,分别针对微电网并网转孤网、孤网转并网两种运行模式切换的工作场景展开探讨。基于Matlab/Simulink搭建如图11所示的微电网系统仿真模型,对所提基于储能并网逆变器混合型算法的微电网无缝切换控制策略进行验证,表2为仿真系统的相关参数。 图11 微电网仿真系统结构图 表2 系统模型的主要仿真参数 假设开关S1在1 s时断开,微电网由并网转孤岛。假设在微电网运行模式切换过程中,网内DGs输出功率、网内负载保持不变。图12与图13给出微电网运行模式切换过程的瞬态特性曲线图。根据图12、图13,微电网未进行运行模式时,储能单元的控制采用的是P/Q控制模式控制A-I点输出有功、无功功率。假定DGs在t=0.5 s时输出有功功率突然由400 kW降至100 kW,DGs输出无功功率由0 kvar增至100 kvar,但此时A-I点的输出功率未发生变化(P=400 kW;Q=50 kvar),如图12所示。在t=1 s时,微电网从并网模式切换到孤岛模式,储能单元采用改进的下垂控制方式,保持微电网电压、频率的稳定。A-I点输出功率迅速转化为P=500 kW,Q=0 kvar,为负荷4供电,如图12(b)所示。 图12 微电网并网转孤岛运行时变化曲线 从图12(a)可以看出,在切换过程中,微电网频率波动很小,其最大波动范围不超过0.5 Hz。微电网进入孤岛运行模式后,其频率偏差Δf,也小于0.1 Hz。因此,微电网频率在运行模式切换过程中的暂态性能可以满足运行要求。此外,在微电网模式切换中交流母线电压的幅值和相位的转换也很平稳。其电压偏差小于7%UN,满足系统的平滑切换要求,如图12(b)所示。从图12(c)可以看出,当微电网的运行方式从并网模式切换到孤岛模式时,储能单元无过流现象且其过渡电流较为平稳。为了进一步验证储能单元抗干扰特性,基于修改后的下垂控制模式,假设在t= 1.2 s时,DGs的输出有功/无功功率分别从100 kW/100 kvar突然变至400 kW/0 kvar,通过储能单元的快速响应,可实现微电网的功率平衡、电压和频率稳定控制,并且电压、频率波动均可控制在允许范围内。 在t=1.5 s时,开关S1关闭,即微电网从孤岛模式切换到并网模式。然后将储能单元的控制模式从改进型下垂模式转换为PQ控制模式。图13给出微网从孤岛模式转到并网模式时的输出特性曲线。此时,A-I点的输出有功、无功功率分别重新变为P=400 kW,Q=50 kvar,如图13(a)所示。从图13(b)可知,微电网运行模式切换过程中的良好的鲁棒性以及快速的动态响应特征,且未出现微电网母线电压的幅值与相位跳变现象,交流母线电压实现无缝过渡,电压偏差远小于7%UN。并且避免了并网电流的畸变,如图13(c)所示。从图13(d),微电网并网开关开断过程中,峰值频率偏移Δf也小于0.5 Hz。因此,储能单元采用本文所提混合控制策略,可以实现微电网两种运行模式间的无缝切换。 图13 微电网孤岛转并网运行时变化曲线 为了进一步验证储能在系统产生大扰动时的暂态稳定特性,假设在t=0.6 s处,F1处发生三相对地故障,此时PCC电压降至50%EN,考虑到故障检测时间,3LG的持续时间为0.4 s,然后在t=1 s断开S1进行清除。因此,储能的控制方式由P/Q转换为V/f控制方式。图14为微网非计划运行方式切换过程中微网暂态特性曲线。从图14(a)、图14(b)可以看出,在排除系统故障时,采用所提出的方法将微网运行方式切换为孤岛运行方式,没有出现微网母线电压畸变。故障排除后,母线电压迅速进入稳定运行状态。然而,传统的控制方法使微电网母线电压畸变严重,动态过程较长。从图14(c)、图14(d)可以看出,所提出的控制方法将ES的输出峰值电流抑制在1.95 kA,明显小于传统控制方法的峰值电流9.8 kA。为了进一步说明该方法的优点,图15给出了定量估计微电网电压、电流和频率波动可以减少多少的误差条。从图15中可以看出,该方法具有较好的性能。 图14 微电网暂态曲线 图15 微电网电压、电流性能比较 针对传统微电网运行模式切换中所存在的过流、电压畸变等问题,文中提出了一种计及储能混合控制算法的微电网无缝切换控制策略。通过理论分析与仿真验证,得出以下结论: (1)该策略通过利用二自由度原理及电流预测模型控制,统一、单位化储能系统控制层传递函数,不仅实现控制系统电压、电流引入量所含有害扰动量的动态全补偿,且有效抑制了运行模式切换过程中暂态电流冲击及母线电压畸变率; (2)通过以微网电压、频率作为补偿项来改进传统下垂控制,从而使微网孤岛运行时系统电压、频率无差调节,最终实现微网在不同运行模式之间的无缝切换,并且提高微电网故障情况下运行模式切换的暂态性能。2.3 二自由度控制原理
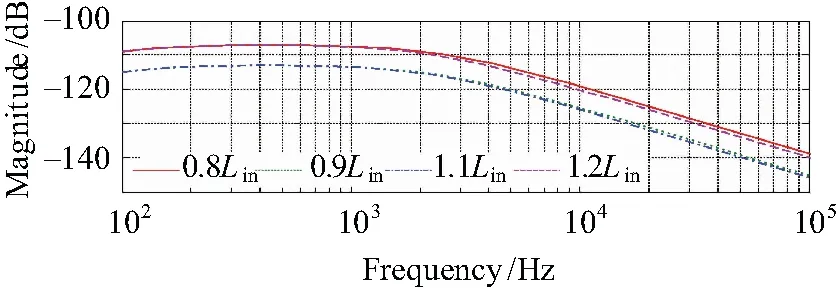
2.4 二自由度模型失配分析

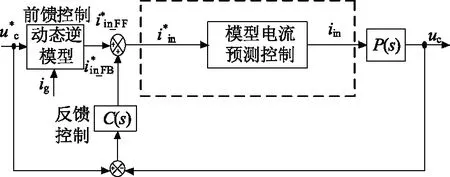
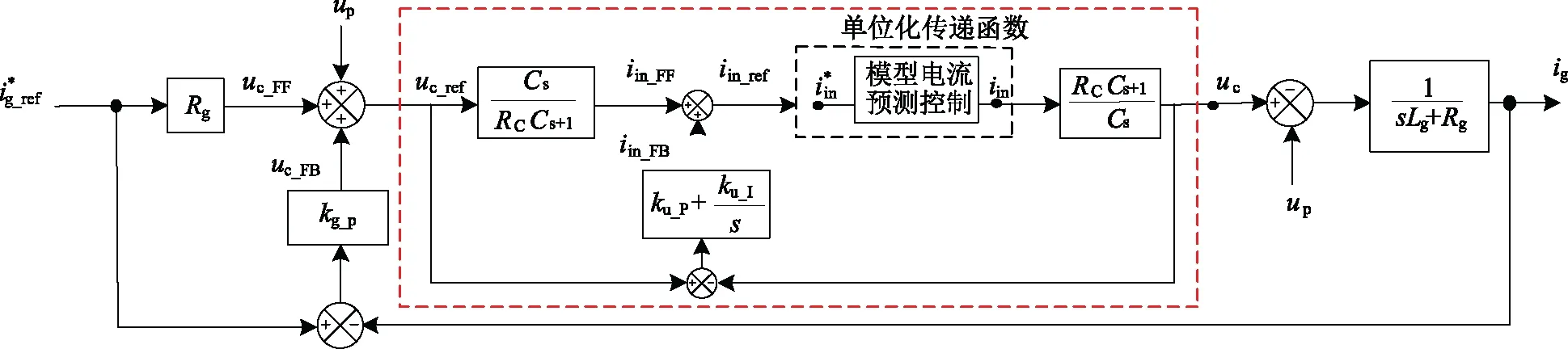
2.5 控制层混合算法实现



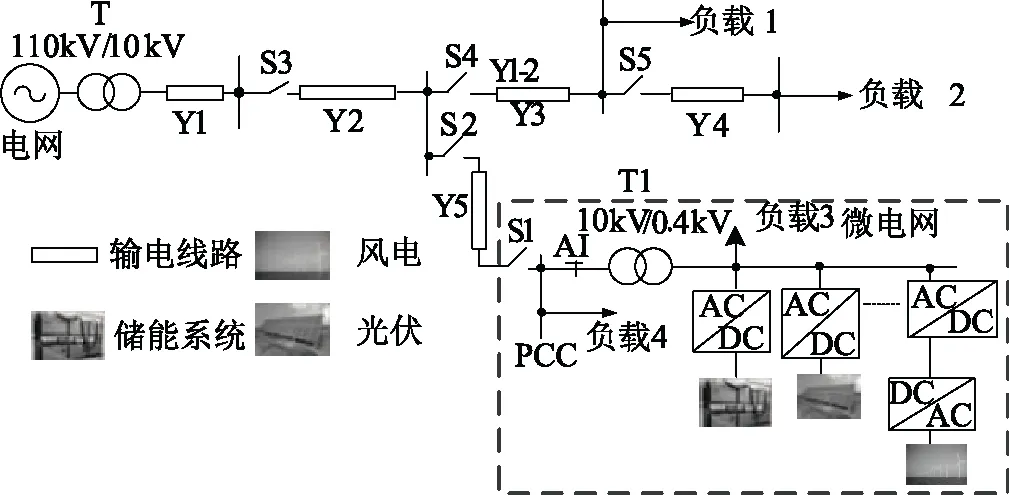
3 储能系统应用层设计


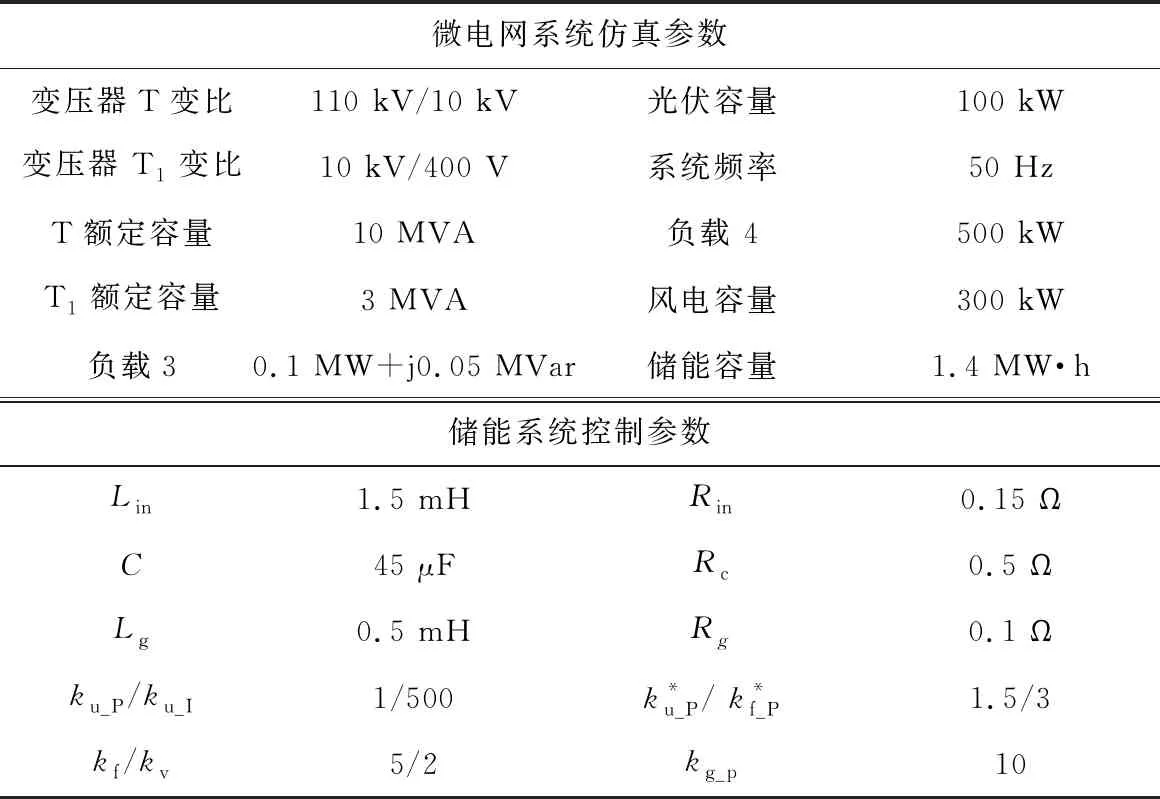
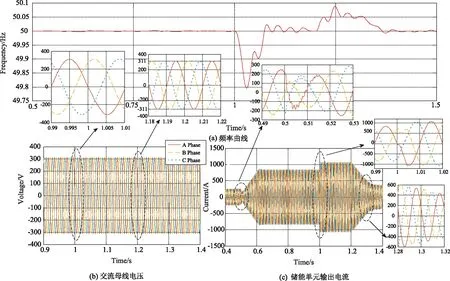
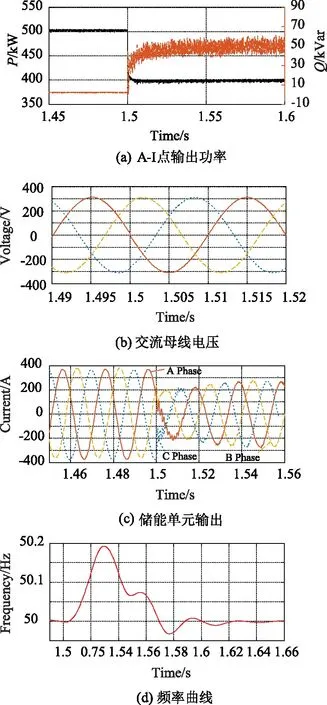
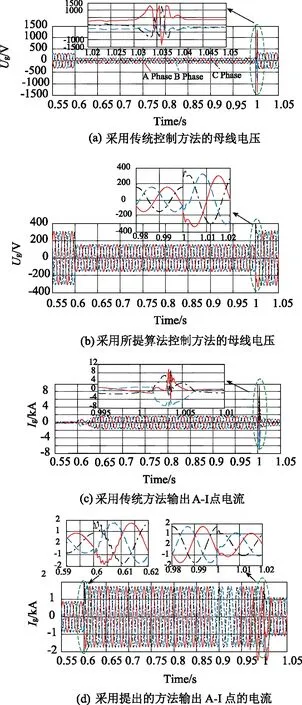
4 仿真验证
4.1 并网转孤岛模式无缝切换
4.2 孤岛转并网模式无缝切换
4.3 故障切换暂态分析

5 结束语
