一种火龙果自动采摘收获机械的设计*
2022-06-08邱立琦于吉政张协良赵俊豪
邱立琦 ,于吉政 ,张协良 ,赵俊豪
(聊城大学机械与汽车工程学院,山东 聊城 252000)
火龙果在经济价值方面有生产周期短、亩产值高等优势。近年来,我国海南、广西、广东、福建、贵州等省份,火龙果种植呈现出相对稳定的增长态势。数据显示,2021年我国共种植火龙果4.2万hm²,产量207.56万t。为减轻火龙果工作人员的劳动强度,提高火龙果采摘效率,减少对果实的损伤,课题小组设计了一款火龙果采摘机[1-5],火龙果采摘机整体模型如图1所示。

图1 火龙果采摘机整体模型
1 五轴关节型机械臂机构
很多学者针对不同的作物设计了精细化的采摘设备,如王燕等[6]设计了四自由度采摘手,但其灵活性和作业范围具有明显的局限性。为了更加准确抓取火龙果,本研究采用了五轴关节型机械臂机构。采用五轴关节型机械臂机构,机械臂能够根据需要实现移动和转动[7]。伺服电机用作装置中的执行元件的微型特种电机,将电信号转成轴的角位移和角速度,具有控制的实时性、准确性等特点。五自由度机械臂模型与运动分析如图2所示,L1、L2、L3、L4为连杆的长度。假设Pi是第i个关节的矢量坐标;Ri是第i个关节的姿态;θi是第i个关节的转动角度;w1、w2表示运动过程中腕关节的2个位置,w2点位置矢量r=(rx,ry,rz)。火龙果采摘机器人硬件平台的构成如图3所示。

图2 五自由度机械臂模型与运动分析

图3 火龙果采摘机器人硬件平台的构成
2 夹持切割机构
夹持切割机构包括夹持运输机构和限位切割机构,两者同时位于机械爪上,同时被电机控制,实现夹持与剪切一体化,夹持切割机构模型如图4所示。等效为弹簧阻尼的夹持机构,与火龙果接触作用过程中,需实时调整阻抗模型参数以适应环境的变化。为此,本研究制定了一种令阻抗模型刚度参数为零,同时对阻尼参数进行基于期望夹持力与采集实际接触力的偏差实时调整的变阻抗控制方法,以实现火龙果分拣夹持机构对火龙果的无损夹取。对火龙果分拣机器人夹持机构进行了运动学分析及动力学建模,针对该模型设计火龙果分拣机器人夹持机构的自适应变阻抗控制算法(VIM+SMC),并进行稳定性证明与仿真验证[8]。

图4 夹持切割机构模型
1)限位切割机构。限位切割机构整体为爪型刀页,割刀尾端具有锋利的刀锋,割刀前端为刀锋,作为辅助夹持机构,防止剪断时果实掉落,两片刀页用两头螺栓固定连接;限位片整体为两端略宽,中部稍窄的骨形,一边与刀页连接,一边与传动齿轮连接,使两片刀页聚拢切割和张开,同时可限制刀页位置,防止刀页运动超程。
2)夹持运输机构。夹持手爪为圆弧夹持型,适用于火龙果果型,同时具有夹持和松紧的功能,有一定的力约束和形状约束,保证被夹持果实在移动、停留和装入过程中不改变姿态。手爪在传动机构中,两手绕支点做圆弧运动,同时对火龙果果实进行夹紧和定心。
3 控制系统
智能控制芯片,通过设定的程序对摄像头和传感器的信号数据进行处理,并判断出实现功能所需的指令信号并传输到执行机构。F2812芯片作为人机交互部分和运动控制部分的主控芯片,可以控制两个四自由度或一个六自由度的机械手[9]。CPU选用的是日本NOVA电子有限公司开发研制的MCX314运动控制芯片。本设计系统用了两块MCX314运动控制芯片[10]。
4 行走机构
后轮驱动装置图如图5所示,车后轮为三角履带轮作为驱动轮,3个支重轮、导向轮由支撑架固定,电机安装在支架上的电机固定结构内,由万向节连接低速大扭矩马达减速机,具有高通过性能。后轮驱动装置采用履带传动,具有爬坡能力强、稳定性高、适用于田间任何地形等特点。
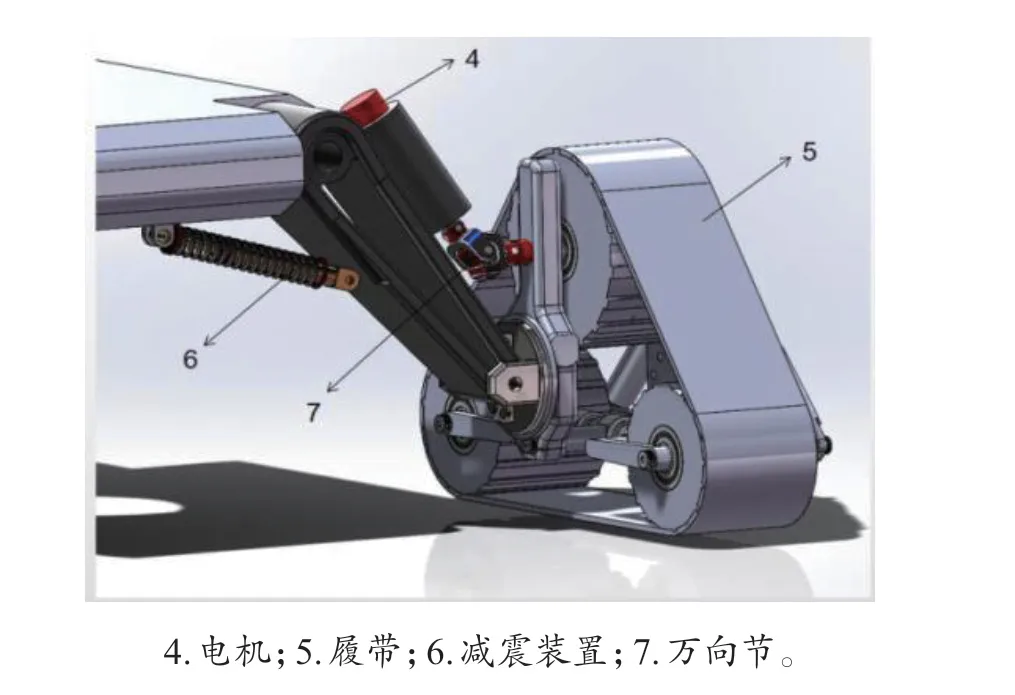
图5 后轮驱动装置图
行走机构总体装置图如图6所示,前轮为人字轮,作为转向轮,轮胎由耐磨橡胶制成,比一般轮胎寿命更长,轮毂采用钢型材加工而成,中心孔四周有四个螺栓口,用于固定轮轴连接件。

图6 行走机构总体装置图
轮轴连接件由钢板与钢管焊接而成,钢板一端通过螺栓固定于轮毂上,钢管一段与前轮轴相连接固定。
后轮减震轴由气缸和减压弹簧组合而成,减压弹簧连接在机身和车轮轮轴上,当有车身震荡时,减压弹簧吸收了振幅,从而保证了整体机器的稳定性。
对车腿支撑架进行有限元分析,经模拟分析,可以实现车轮的运行,支架有限元分析图像结果如图7所示。
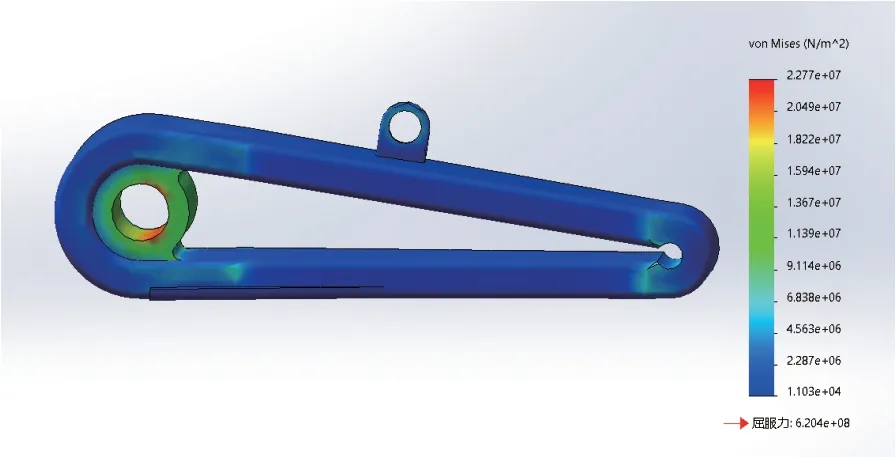
图7 支架有限元分析图像结果
5 双目立体视觉定位测距机构
双眼立体视觉测距仪的核心技术就是利用仿生眼来达到与人体相似的视觉识别能力。利用电脑对影像的了解,可以让机器人感受到物体的运动特征,并对其进行描述和辨识,从而实现对目标的精确定位和距离。该系统的开发平台是以OpenCV 2.4.9为基础的Visual Studio 2013编写的。双目立体视觉定位测距机构如图8所示,主要由两个工业摄像机、三角支架、双目板、水平仪、万向三维云台等组成。

图8 双目立体视觉定位测距机构
立体视觉定位与测距框图如图9所示,双眼立体视觉距离测量系统由特征提取、立体匹配、三维定位和距离测量等部分组成。基于特征立体匹配算法框图如图10所示,抽取的特征点可以构造出相应的特征描述,并选取适当的相似度指标来搜索出两张图片中所对应的相似点。立体匹配是双眼立体视觉中最为关键和最为复杂的部分,其匹配的优劣将直接关系到视差的品质。双目立体视觉定位与距离测量是根据摄像机标定过程获得的摄像机参数,结合立体匹配得到视差,再通过平行双目视觉模型便可计算出目标物体的三维信息[11-14]。

图9 立体视觉定位与测距框图

图10 基于特征立体匹配算法框图
6 结语
火龙果自动收获采摘机械使用可充电电池,为整个机械提供动力,具有能源环保、噪声低、灵活度高、操作简单、体积小、重量轻等特点;运动转向机构由转向从动轮和后部履带动力轮组成,便于在碎石及泥土路面行驶,提高机器整体运行的稳定性;夹持收获机构由夹持手、限位切割刀、多轴运动臂及其传动齿轮组合件组成,其中多轴运动臂由多组液压缸和轴控制器组合而成,具有位置伺服功能,能实现多轴联动、速度加速度控制、动态补偿等,便于对多方位的火龙果进行采摘同时可将火龙果装入后方装载仓中;控制系统由微型处理器、外围储存器、传感器接口、轴控制器、辅助设备控制、通信接口和网络接口等组成,保证了机械臂运动的准确性,尽可能保证采摘过程中没有遗漏果实并且采摘时不伤果。
