一种DSM提取及TDOM生产的新方法
2022-06-06贺海明杨溪浩林用智
贺海明,杨溪浩,林用智,孙 剑,王 杰
(西华师范大学 地理科学学院,四川 南充 637009)
随着无人机摄影测量技术的发展,利用无人机航摄数据生产高质量的真正射影像(True Digital Orthophoto Map,TDOM)正逐步成为一种新的趋势[1]。TDOM以数字表面模型(Digital Surface Model,DSM)为基础进行数字微分和纠正,不仅能消除地面空间目标的投影误差,还具有更丰富的色彩,其纹理和图案也更易于判读[2-4]。目前,DSM提取效率和精度有待提高,修复和改善DSM误差的方法费时费力[5-6]。常用的Inpho软件,人工干预较多,操作流程繁琐,整体生产效率不高,像素工厂空中三角测量解算能力较弱,自动提取的DSM精度较差[7-9]。TDOM的生产存在遮蔽区域检测及最优影像替换问题,常用的PhotoScan 软件和航天远景一键快拼(OKMatrix) 软件制作的TDOM精度较低,精细化程度并不能满足生产实践需求[10-13]。因此,如何快速获取高精度的DSM是目前TDOM大规模生产的关键问题。本文以高分辨率无人机影像为实验对象,通过PhotoScan、Bingo、PCI三款软件联动处理的方式,提出了一种DSM提取及TDOM生产的新框架。
1 数据采集
测区位于四川省南充市顺庆区西北方向,距离市中心5 km,测区范围为30°49′13″—30°49′28″N,106°3′51″—106°4′7″E。区域内地势平坦、植被稀疏、建筑物分布均匀、空域安全。实验所用的无人机为飞马D2000,搭载D-CM3000航测模块,系统标准起飞重量为 2.8 kg,标注载荷为200 g。无人机相机参数如表1,飞行参数如表2。航线规划如图1所示,共6条航带,航线间距54 m,拍照间距24 m。本次实验采用华测i70RTK搭配千寻CORS进行测量获取像控点实测数据。飞行结束后,导出照片和GPS数据。采用融合方式进行解算。融合解算指的是 RTK/PPK 的融合差分作业模式,其融合模式是优先使用后差分固定解结果,而对PPK非固定解部分则采用 RTK 固定解数据进行融合,通过互补的作业模式保障高精度POS数据的质量。

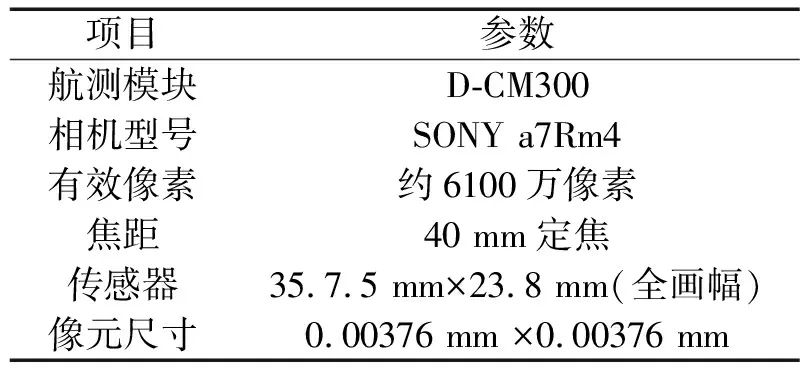
表1 相机参数

表2 飞行参数
2 实验原理
PhotoScan能调用计算机GPU加

速,支持分布式计算节点,大大减少了影像连接点匹配时间;在操作界面上,可视化能力较强,刺点方便[14]。PhotoScan匹配的连接点中包含大量错误的点,如飞点和高程值异常的点。这些错误的点也参与到空三解算中,造成空三效果较差,如模型近地面出现扭曲或模糊。可将PhotoScan初始化空三结果导入其他严格的摄影测量系统中平差处理,以提高空三精度[15]。Bingo软件是一款空三和近景测量平差软件,最显著的特点是认为一切输入的数据源均含有误差,能标定运动过程的相机,其自身的连接点匹配模块ATM运算效率较低。但Bingo能兼容PhotoScan的空三格式,并通过SAMBA模块筛选多余的连接点,再进行严密空三加密和误差调整。PCI软件提取DSM生产TDOM流程简便,精度较高;GeoFill和DEM Editing模块对于DSM拉花和阴影区域的修复和改善非常方便;Mosaic模块影像镶嵌和匀色能力十分出色;空三解算能力较弱,刺点操作繁琐,但能读取Bingo相机标定网格,调用Bingo空三成果。因此,本框架探索三款软件的联动处理,以快速获取高精度空三成果为基础,再进行DSM提取和TDOM生产。实验流程如图2所示,首先规划航线,再进行数据采集,主要有无人机摄影测量和像控点测量。像控点布设原则:足够的点数量、点均匀分布、点位清晰、四周空旷、地势起伏不大。采集足够数量的像控点,既可以保证空三加密精度,还可以使用部分多余点进行校核,提高空三精度。实验采用华测i70RTK搭配千寻CORS测量获取34个像控点实测数据,其中检查点17个[16-19]。数据处理分为三大块:PhotoScan匹配连接点,刺点优化、更新,导出空三结果和更新后的POS数据;Bingo软件筛选并剔除多余连接点,再进行严密空三解算和误差调整,同时标定相机;PCI软件匹配核线核面,提取DSM,修复DSM,纠正影像,镶嵌和匀色,完成TDOM的生产。
3 PhotoScan初始化空三处理
PhotoScan处理流程为:新建PhotoScan工程,导入影像;导入POS数据,选择对应的坐标系,本次实验均采用WGS 84 / UTM zone 48N (EPSG:32648)坐标系;打开Tool选择 Camera Calibration,输入相机的焦距和像元尺寸;打开Tool选择Preferences,勾选GPU,调用GPU加速;打开Workflow选择Align Photos,进行初始化空三解算;导入控制点文件,刺点优化并更新;导出相机,选择Bingo格式,同时导出更新后的POS文件。
4 严密空三解算
4.1 Bingo工程的建立
PhotoScan导出的文件有itera.dat、image.dat、geoin.dat、gps-imu.dat,将这些文件与project.dat文件(Bingo运行的主工程文件,含RELAX、BINGO、SKIP程序处理控制的所有参数)放入新建工程文件路径中。PhotoScan中导出的文件均为相对坐标系,Bingo软件对于文件的输入与读写有严格的格式要求。因此,需对geoin.dat和gps-imu.dat文件进行编辑和整理,其中geoin.dat文件用Bingo Geoin Editor编辑,在编辑栏中需输入相机焦距、像主点偏移量、标准偏差、控制点、检查点、偏心矢量等参数,同时编辑好控制GPS/IMU运行的文件;gps-imu.dat文件从更新后的POS文件中提取,经过控制点纠正后的POS数据精度更高,与POS数据格式相比,gps-imu.dat文件中需去掉照片后缀“.jpg”。
4.2 连接点的筛选和剔除
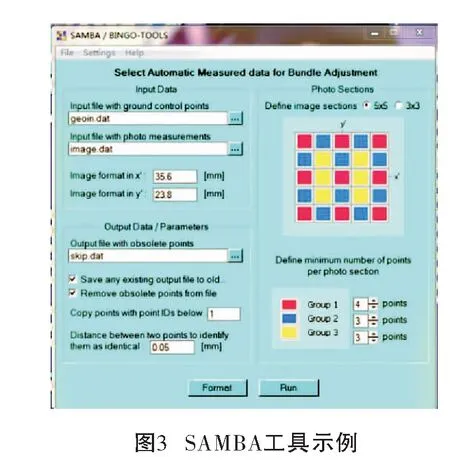
连接点的筛选和剔除采用Bingo软件的SAMBA和SKIP模块。SAMBA模块可自动读取geoin.dat和image.dat文件,从而读取影像的尺寸,对连接点进行筛选,再通过SKIP模块将筛选出来的连接点剔除(图3)。整个流程操作简便,运行效率较高,连接点剔除效果显著,如表3所示,平均每张照片连接点数量为127个,仅为处理前的3.7%,能提高后续空三解算效率和精度。

表3 连接点剔除前后对照表(单位:个)
4.3 Bingo空三解算流程
Bingo空三的解算依次使用RELAX、BINGO、SKIP、CYCLE四个模块:RELAX模块,进行照片的初始相对定向,并重新估算连接点坐标值;BINGO模块,通过读取GPS信息、连接点的近似坐标、控制点、相机参数等建立误差方程,使用光束平差法重新解算照片的内外方位元素和连接点坐标值,每次均严格按照最小二乘方法调整误差,图像测量中识别的错误写入skip.dat文件中,Bingo还产生reselli.dat文件(存储控制点、检查点、连接点残差)、gpsres.dat文件(存储GPS/IMU的残差)、imresi.dat文件(存储相机畸变参数和照片测量残差)、bingo.lis文件(BINGO过程报告文件);SKIP模块,从图像坐标文件中读取照片测量值,并从skip.dat文件中读取已经识别出的错误,SKIP程序将剔除这些错误,以便参与下一次误差调整;CYCLE模块,循环执行BINGO和SKIP模块,通过不断迭代来调整误差。若Bingo在运行过程中遇到明显错误的照片或连接点(粗差点)导致空三解算无法通过,打开bingo.lis文件,将这些照片和粗差点放入BINGO剔除窗口,它们将不再参与空三解算。
5 空三成果分析
5.1 GPS残差分析
Bingo软件Gpsview模块按照片号顺序显示GPS和IMU数据的残差,小型无人机上的IMU精度较差,不具有分析讨论意义,仅展示GPS残差,如图4所示。GPS解算精度取决于无人飞行平台的稳定性、自身携带的PPK精度、解算方案的可靠性。本次使用的无人机平台稳定性较差,解算出的GPS残差曲线部分波动较大,如第2、5航带,但误差均在可控制的范围内。POS数据采用融合的解算方式,后期又经过控制点的纠正,使得GPS整体具有较高的精度,最大残差为680 mm,与同类型解算方案相比仍具优势[20]。

5.2 相机标定
Bingo在进行误差调整的同时,可进行相机标定和照片测量残差分析,这两者的图形表示均被限制在一个矩形中,真正的点已经在图像中被测量,如图5、图6所示。相机畸变图通过相机格网描述相机附加参数对图像几何形状的影响,最下方轴线图像为相机附加参数的径向对称效应,相机格网可在其他摄影测量系统中进行后续处理;图像形变图描述了点分布和照片测量的残差,主要用于系统图像错误的识别,通过照片测量的残差对图像几何形状的影响可分析误差的分布范围和传播方向[21-22]。

5.3 空三解算结果可视化分析

Bingo软件通过3Dview显示物体空间中所有的调整结果,如图7所示,图像连接、照片连接点、照片测量的残差、无人机航带和其他细节均可查看。通过拖动控制栏查看每张照片GPS的残差大小,从而判断该张照片的GPS在X、Y、Z方向上的系统误差。Bingo软件还能对reselli.dat文件进行图形化显示,本文着重于无人机航带和连接点误差展示。如图8所示,无人机航带整齐,解算质量良好,三角符号为控制点布设位置。不同颜色连接点判断出空三误差的分布范围和传播方向,红点和蓝点为残差较大的连接点,主要分布在测区边缘地带;绿色连接点的密集分布区与航带重合,核心区连接点解算良好。
5.4 空三精度评定
本次实验所用的模型点和检查点均采用华测i70RTK搭配千寻CORS测量方法,实地采集具有明显特征的地物要素,如道路中心交叉点、斑马线直角点、停车线直角点、颜色纹理变化分界点等,其误差值如表4所示。经计算检查平面中误差为60 mm,高程中误差为75.7 mm,空三结果满足《CH/T 9008.1—2010基础地理信息数字成果1∶500、1∶1000、1∶2000数字线划图》中1∶500地形图精度要求。

表4 控制点检查点误差表
6 DSM提取及TDOM生产
6.1 DSM提取
Bingo 空三解算完毕后,将Bingo空三导入PCI软件中进行DSM的提取。步骤如下:新建PCI工程,输入相机参数,导入相机网格,选择项目坐标系;导入照片,并将照片转换为PCI软件默认的pix格式;导入Bingo空三工程,PCI能提取Bingo解算好的照片外方位元素和连接点信息;根据读取的连接点信息,匹配核线核面,再提取DSM。
初始DSM如图9,修复后的DSM如图10所示,修复区域主要为建筑物顶部拉花、阴影遮蔽。修复后的DSM整体比较纯净和完整,图案纹理细节完好;建筑物和道路轮廓完整,植被清晰可见,仅在图像边缘有较小遮蔽区和拉花情况,手动编辑的工作量大大降低,证明本文的生产框架所提取的DSM精度较高,完整度较好。对于局部小的错误的区域,用PCI软件中Focus模块下的DEM Editing 和Smart GeoFill修复工具进行编辑和修复。
6.2 TDOM生产
使用修复后的DSM进行影像纠正,纠正方法可选择最近邻法、双线性插值、三次卷积。最近邻法适合离散数据重采样,在计算时间上被认为是最有效的,但它在输出图像中引入了微小误差,输出图像会在空间上出现偏移,导致图像具有锯齿状外观,在镶嵌时出现脱节的情况,因此并不适合用于TDOM的纠正。双线性插值和三次卷积均适用连续数据的重采样。双线性插值生成的图像外观比最近邻法更平滑,但在重采样过程中灰度值被改变,这将导致图像模糊或分辨率损失。与双线性插值相比,三次卷积更适用于连续数据,得到的图像更清晰,且没有最近邻法产生的影像脱节。因此,本实验使用三次卷积进行影像的重采样纠正。纠正完成后,采用MOSAIC模块进行镶嵌和匀色,影像镶嵌关键是确保拼接线两侧相邻图像的颜色尽可能相似,应避免穿过颜色和纹理明显不同的区域,如建筑物、水体等;影像匀色可使用Bundle色彩平衡方法调整图像的亮度和对比度。最终生产结果如图11所示:图像整体清晰,纹理细节完好;建筑物无明显倾斜,道路轮廓完整,能真实的还原实际地物情况。

7 结 语
本文基于低空高分辨率无人机影像提出一种DSM提取及TDOM生产的新框架,即采用PhotoScan快速匹配连接点,刺点优化;再利用 Bingo软件剔除多余的连接点,进行严密的空三解算和误差调整;将解算好的空三成果导入到PCI软件中,匹配核线核面,提取的DSM经过修复和编辑后,纠正影像,最后生产出高质量的TDOM。本文通过实验验证了该框架的合理性和应用于生产实践的可行性,阐述了具体生产流程,并对重要的环节进行了探讨,该框架对DSM提取及TDOM生产具有一定的参考价值。不足之处在于测区边缘的DSM、TDOM仍有扭曲和拉花情况,在生产实践中可采取的应对措施有:使用长焦距、窄视角的相机进行摄影;航线外扩,提高飞行高度,增加飞行重叠度等。本文实验所用的无人机影像为正射影像,PCI软件不支持多镜头影像的处理,后续可以将多镜头的焦距转换,探索通过多镜头倾斜摄影测量的严密空三解算提取DSM和生产TDOM。
致谢:在数据采集过程中,程熙老师给予了帮助,在此致谢!
