一种基于实际导航性能的飞行误差实时评估方法
2022-06-06滕继涛朱珑涛季玉龙
滕继涛,朱珑涛,季玉龙
一种基于实际导航性能的飞行误差实时评估方法
滕继涛1,朱珑涛2,季玉龙2
(1 中国人民解放军93216部队,北京 10000;2 四川大学空天科学与工程学院,成都 610065)
RNP飞行程序的飞行误差是实时评估飞行器按照预期航线飞行的重要指标,目前的飞行误差评估算法大多停留在理论研究阶段,缺少在仿真环境中使用飞行程序对算法进行验证,为解决上述问题,提出了一种基于实际导航性能的飞行误差实时评估方法,并在开源飞行仿真平台BlueSky上进行了仿真试验,实验表明该方法能够完成飞行误差的实时评估,也为其他飞行误差评估算法的验证实施提供了一种思路。
飞行误差;实际导航性能;实时评估
0 引言
所需导航性能(Required Navigation Performance,RNP)是20世纪90年代,未来航空导航系统(Future Air Navigation Systems,FANS)委员会向国际民航组织(International Civil Aviation Organization,ICAO)提出的概念,该概念用于评价飞行器的导航性能,而实际导航性能(Actual Navigation Performance,ANP)则是用来评价飞机导航系统精度的实时标准,从而判断飞行的导航性能是否达到航路规定的标准[1-2]。
在中,要求运营航空器具有机载性能监测和告警功能,未达到所需侧向导航精度可能是由航空器沿线飞行和定位误差造成的。从而将误差源定义为如下三种误差,以使得导航精度的度量有定义且便于量化、精确度量和控制:
1)航径定义误差(Path Definition Error,PDE):定义航径与预期航径之间的误差;
2)飞行技术误差(Flight Technical Error,FTE):估计位置与定义航径之间的误差;
3)导航系统误差(Navigation System Error,NSE):飞行器真实位置与估计位置之间的误差。
上述三种误差组成总系统误差(Total System Error,TSE),关系图如图1所示,其中用值反映[3],数值较小,通常可以忽略不计。需要注意的一点是估计位置和预期位置都是可知的,实际位置是不可知的,因此值是可以直接计算得到的,而值则需根据当前误差的分布通过概率论知识得到。
本文基于的定义提出了一种值的计算方法,并结合组成以完成飞行误差的评估,在开源飞行仿真平台BlueSky上进行仿真试验,试验结果表明本文提出的飞行误差评估方法符合飞行器沿航线飞行的预期情况,并且也为其他飞行误差评估算法的验证实施提供了一种思路。

图1 PDE、FTE与NSE关系图
1 RNP与ANP的具体含义
利用不同导航性能要求去定义不同等级的类型,制定划分空域和航路类型。导航性能包括各性能参数,即精度、完好性、连续性等。对应于某个等级的空域和航路类型的各性能参数都有要求,选择主要的具有代表性的参数精度去划分类型,它由导航传感器误差、显示误差和飞行技术误差组合而成,这种组合也称为“导航性能精度”。在某一空域或一条航路上,要求其每架飞机的导航系统精度在总飞行时长的95%时间内出现偏离希望航迹的距离不得超过某一数值。这个统计特性上的精度值被定义为“包容距离”,如图2所示。
图2中,包容距离(-)在95%时间内处于其中,包容区是一个2×-的区域,包容度为99.999%的时间概率。
当飞机在某一空域或一条航路上飞行时,飞行员若能从仪表上实时知道飞机目前所在位置,就能确保飞机准确地飞行。为此,波音公司引入了,将其定义为飞行管理计算机估算的位置与飞机实际位置之间的误差。表示的是根据飞行管理计算机(Flight Management Computer,FMC)计算出的估计位置为圆心的包容距离,且飞机实际位置落在该包容距离的概率为95%。高性能的根据导航传感器传输回来的导航数据,选择其中精度最高的数据对飞机当前导航精度进行估算得到,该值显示给飞行员,飞行员获此消息,就能估计出飞机的实际位置。
在一个已知的航路上,如果只占系统误差的小部分,意味着飞行员可操作的空间很大,即可允许的飞行技术误差可以变大,减轻了飞行员的操作压力,如图3所示[4]。
但是,目前对于飞行误差的算法研究要么局限于理论研究阶段,要么在算法验证阶段中所用的飞行数据样本少,对不同飞行状态下的飞行误差数据的验证考虑不足,缺少在飞行仿真环境中飞行误差算法验证的阶段。
2 飞行误差实时评估算法及仿真结果
飞行误差实时评估算法根据航段的不同分为沿航迹至定位点(Track to a Fix,TF)航段和固定半径定位点(Constant Radius Arc to a Fix,RF)航段评估两部分,航段不需要计算飞机的转弯半径,而航段需要根据飞机速度计算飞机的转弯半径,在本算法中飞机的转弯的坡度默认为3°。并在仿真实验中默认获取的飞机位置为估计位置,而非实际位置,尽管对于仿真来说实际位置是可以获取的。
2.1 TF航段ANP值评估
当飞机在航段飞行时,以飞行仿真环境中飞机实时位置经纬度和自定义预期航段起始点及终止点经纬度作为输入,实时结算出的系统导航误差值与飞机飞行所处航段规定的值比较,从而达到飞行误差评估及飞行误差算法验证的目的,解决飞机执行飞行程序的飞行误差评估问题。其中值的算法流程图如图4所示。
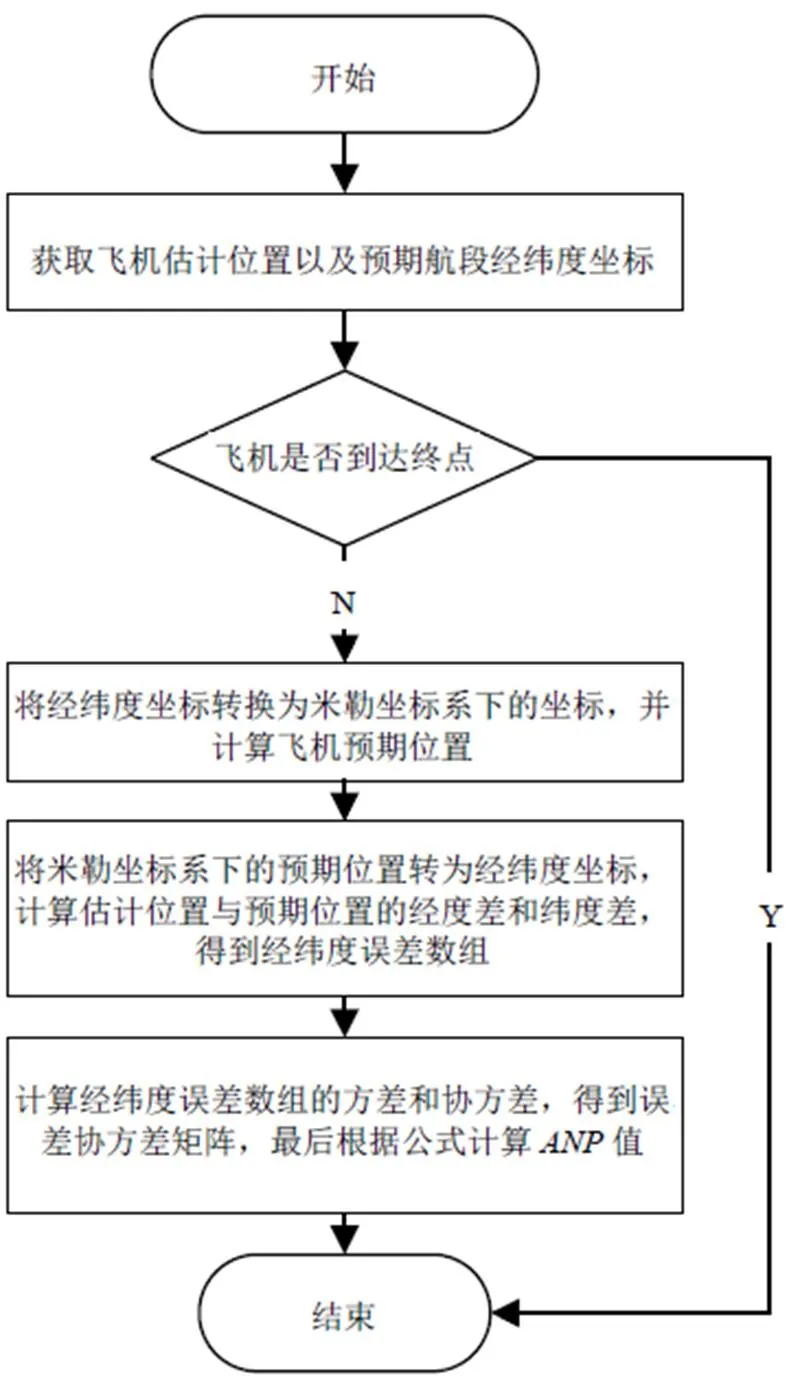
图4 TF航段ANP值算法流程图
首先获取飞机估计位置经纬度和航段起始点及终止点经纬度数据,然后将上述经纬度坐标通过米勒投影转化为平面坐标,再在米勒坐标系下计算估计位置在航段上的投影点,即预期位置。其中,若航段在米勒坐标系下对应的直线的斜率为0,则预期位置的横坐标为直线上的横坐标,纵坐标为被投影点的纵坐标,若该直线的斜率不为0,则投影点的坐标用式(1)和式(2)计算:

式中,为投影点的横坐标;为投影点的纵坐标;为直线的斜率;1为被投影点的横坐标;1为被投影点的纵坐标;2为直线上任意一点的横坐标;2为直线上该点的纵坐标。
然后将计算所得的投影点坐标通过米勒投影的逆转换获得投影点的经纬度坐标,再计算飞机估计位置经纬度坐标与对应投影点的经纬度坐标的经度差和纬度差,进而得到飞机估计位置与预期位置的经度误差数组与纬度误差数组。



式中,为误差概率;为转换因子。



2.2 RF航段ANP值评估
航段值的计算与航段的不同主要在于飞机预期位置的计算,航段值算法流程图如图5所示。

图5 RF航段ANP值算法流程图
式中,为真空速;为坡度角。
2.3 仿真试验
在上述两节完成了航段和航段的值实时计算,要实现飞行误差的实时评估还需要,由于影响因素过多,比如导航设备、空间信号、风况以及人为的不可预测的因素,因此实时估计飞机值非常困难。其具体的做法是对飞机进行足够多的飞行试验,并制成相应的表格,使用时直接查询即可,如表1所示[9]。

表1 工业标准的FTE(单位:n mile)
的计算公式为:

将基于椭圆误差所得的与工业标准的值代入式(11)计算,即可得到。
BlueSky是由荷兰代尔夫特理工大学研究人员研发的一种对空中交通管理的开源软件,该软件由脚本语言Python开发,支持二次开发,易于操作,可以通过命令对飞机添加航路点。本次试验的仿真场景为飞机执行泸州机场的离场程序,选用程序中的航路点经纬度如表2所示。

表2 离场程序包含的航路点(单位:°)

图7 离场航线
在BlueSky中给飞机增加航路点后的航线如图7所示,其中白色的三角形表示飞机,绿色的四角星表示航路点。
在上述航段利用实时评估算法得到的分析图如图8所示,在图中从上至下曲线的含义依次为值、值、值和值,通过对和的实时计算,可以从图中直观地看出在整个离场程序中,大约为0.05 n mile,大约为0.14 n mile,为1 n mile,满足该航段的值要求。
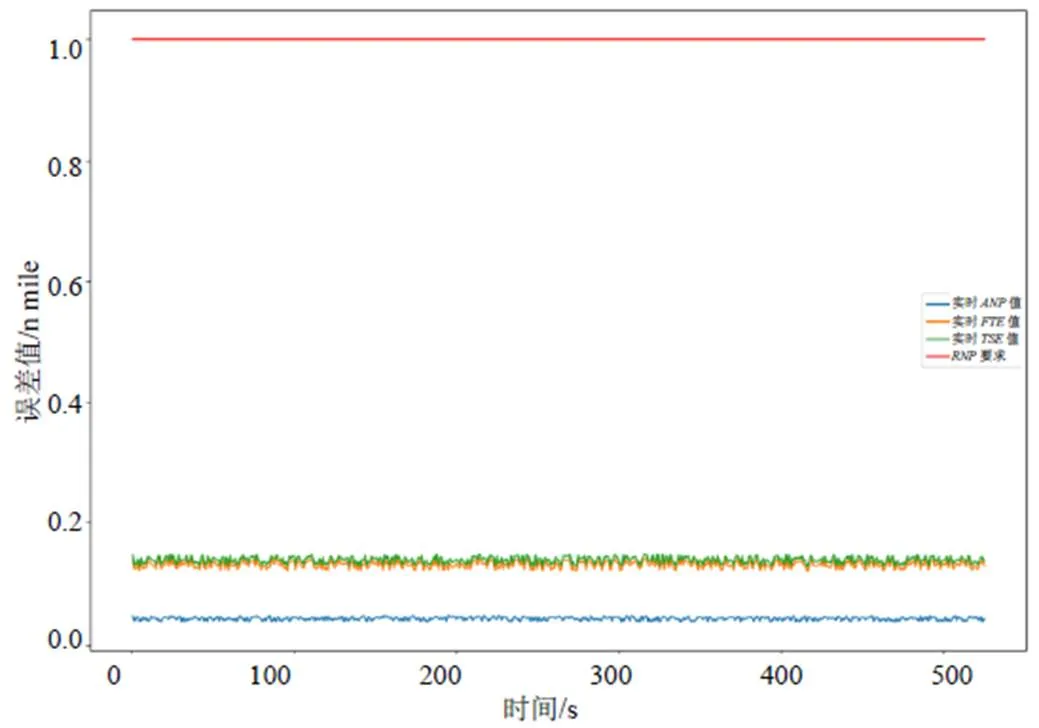
图8 飞行误差实时评估图
3 结论
本文基于的定义提出了一种值的计算方法,并结合组成以完成飞行误差的评估,在开源飞行仿真平台BlueSky上进行仿真试验,试验结果表明本文提出的飞行误差评估方法符合飞行器沿航线飞行的预期情况,并且也为其他飞行误差评估算法的验证实施提供了一种思路,但本文的误差主要来源于根据导航源误差特点设置的人为误差,与真实的飞行误差来源有所差别,这是在以后的研究中需要考虑的。
[1] 张楠楠. 实际导航性能计算方法研究[J]. 航空计算技术,2017,47(6):49-51.
[2] 王倩营. 基于性能的导航(PBN)发展研究[J]. 电子测试,2019(4):123-124+134.
[3] 郭磊. 实际导航性能(ANP)算法研究[D]. 天津:中国民航大学,2010.
[4] 肖山,倪育德. 基于GPS的实际导航性能计算[C]// 第八届全国交通运输领域青年学术会议论文集,2009:290-293.
[5] 孙淑光,戴博,张鹏. 机载组合导航系统实际导航性能计算方法[J]. 控制工程,2011,18(2):262-266.
[6] 王丹,马航帅,孙晓敏. 民用飞机导航性能实时评估与监视技术研究[J]. 航空电子技术,2014,45(4)1-5.
[7] 宁亚锋,李文辉,谢轶俊,等. 民用飞机组合导航实际导航性能计算方法[J]. 航空电子技术,2020,51(2):50-54.
[8] 赖际舟,王玮,刘建业,等. 基于数值积分的机载导航系统ANP评估算法[J]. 交通运输工程学报,2013,13(5):115-120.
[9] 郭婧,薛广月,王嫣然. RNP运行中的实际导航性能评估技术研究[J]. 民航学报,2018,2(3):29-33.
Real-Time Evaluation Method of Flight Error Based on Actual Navigation Performance
TENG Jitao, ZHU Longtao, JI Yulong
The flight error of RNP flight program is an important index for real-time evaluation of aircraft flying according to the expected route. Most of the current flight error evaluation algorithms stay in the theoretical research stage and lack of flight data samples for verification. In order to solve the above problems, a real-time evaluation method of flight error based on actual navigation performance is proposed in the paper, simulation experiments are carried out on the open-source flight simulation platform BlueSky. The experiments show that this method can complete the real-time evaluation of flight error and also provides an idea for the verification and implementation of other flight error evaluation algorithms.
Flight Error; ANP; Real-Time Evaluation
V249.3
A
1674-7976-(2022)-02-092-06
2021-11-16。滕继涛(1972.02—),吉林德惠人,博士,高级工程师,主要研究方向为航空导航。