转发式欺骗干扰时延控制算法
2022-06-06王晓宇
郑 晨,王 琼,姜 昱,王晓宇
转发式欺骗干扰时延控制算法
郑 晨,王 琼,姜 昱,王晓宇
(中国电子科技集团公司第二十研究所,西安 710068)
无人机卫星导航欺骗技术在现代导航战中越来越受到广泛的关注,其中转发式欺骗干扰因其无需获得信号结构的先验知识,在军码导航领域比生成式欺骗干扰更具使用价值。目前的军码转发信号普遍以转发接收天线点的位置坐标作为基础进行定点静止转发,在对无人机欺骗干扰时,信号置信度不高,干扰效果不佳。提出一种转发干扰时延算法,根据转发坐标需求计算不同卫星信号的时延量,可根据欺骗策略实时调整转发坐标,提高干扰成功率。最后通过实验验证,提出的时延算法得到的转发坐标误差在米级范围,验证了算法的正确性。
转发式欺骗干扰;时延控制;导航战;卫星导航
0 引言
卫星导航欺骗干扰采用发射与真实导航卫星相同结构信息的欺骗式卫星信号,达到扰乱目标坐标、时间信息的目的,在现代导航战中,越来越受到各国的关注[1]。卫星导航欺骗干扰从技术上来说,可以分为生成式欺骗干扰与转发式欺骗干扰两种。生成式欺骗干扰利用导航卫星信号结构的公开性,产生与真实卫星信号具有相同星历、编码、调制结构的欺骗式卫星信号,实现对目标的导航欺骗;转发式欺骗干扰通过接收真实卫星信号,加上时间延迟信息后,重新播发出去,实现对目标的欺骗 干扰[2]。
生成式欺骗干扰现已广泛应用于安防、反恐、公共治安等多个领域[3]。而在现代战争中,由于武器装备普遍采用加密程度更高的军码卫星信号来进行自身的导航、校时,因此,已无法通过生成式干扰来产生与军码导航信号相同的欺骗信号,只能利用转发式干扰对其进行欺骗式干扰[4]。
现有的转发式欺骗干扰技术主要是通过将接收到的信号直接转发至目标处,使目标定位出现偏差。然而这种方法由于未考虑目标的实际位置、速度等信息,产生的欺骗坐标与目标坐标偏差过大,容易被检测识别,很容易造成欺骗干扰失败[5]。为了提高欺骗成功率,改善欺骗效果,需要在接收端将各颗卫星信号进行分离提纯,并结合目标的位置、速度等信息,计算出每颗卫星信号的时间延迟量,最后通过硬件设备控制信号进行时延后播发出去,实现对军码接收设备的有效欺骗。
本文对转发式欺骗中的时延量进行分析,给出一种分通道时延控制算法,并通过半实物仿真测试,验证了算法的正确性,为转发式欺骗干扰硬件实现提供了理论基础。
1 转发式欺骗基本原理
转发设备接收当地的卫星导航信号,经延迟、功率放大后,由干扰发射天线向空中辐射,使目标区域内的无人机收到转发设备发射的导航信号,如图1所示。

图1 转发式欺骗示意图
转发式干扰需要从很低的信噪比中提取、放大信号,以保证信号未畸变或较少畸变,并提高输出信噪比。由于干扰信号幅度大于真实卫星导航信号,被欺骗目标的导航接收机可将转发的干扰信号捕获。当转发设备对卫星信号的延迟进行相对应调整后,使被欺骗目标的接收机测得的卫星伪距发生变化,导致其无法正常工作或是给出错误的定位授时信息,从而达到欺骗目的。
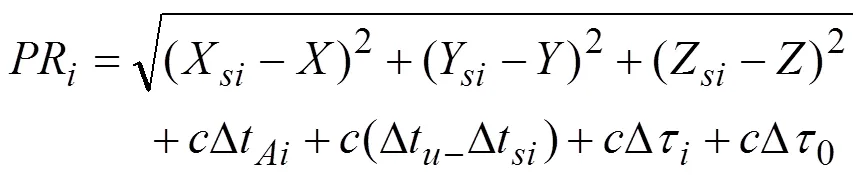
卫星导航伪距测量定位模型如图2所示。
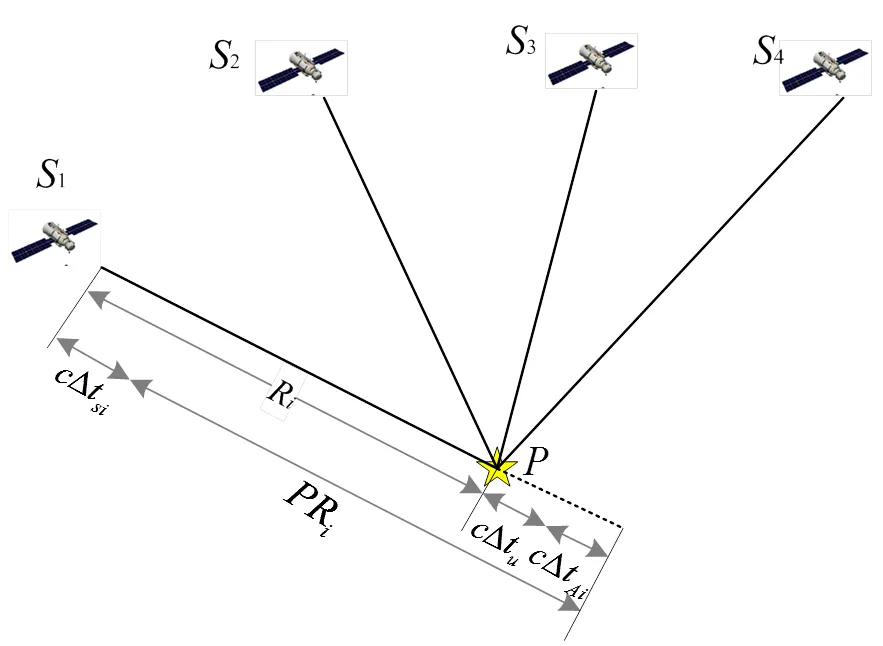
图2 卫星导航伪距测量定位模型



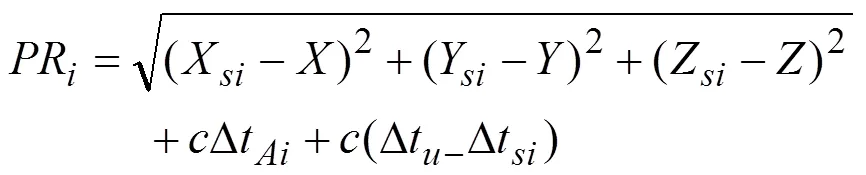

式中,为引入的第颗卫星的信号延迟量,只要合理控制好每颗卫星的转发延迟量,即可使无人机发生导航定位错误,达到欺骗接收机的目的,如图3所示。
2 转发时延量计算
转发时延量的计算如图4所示。
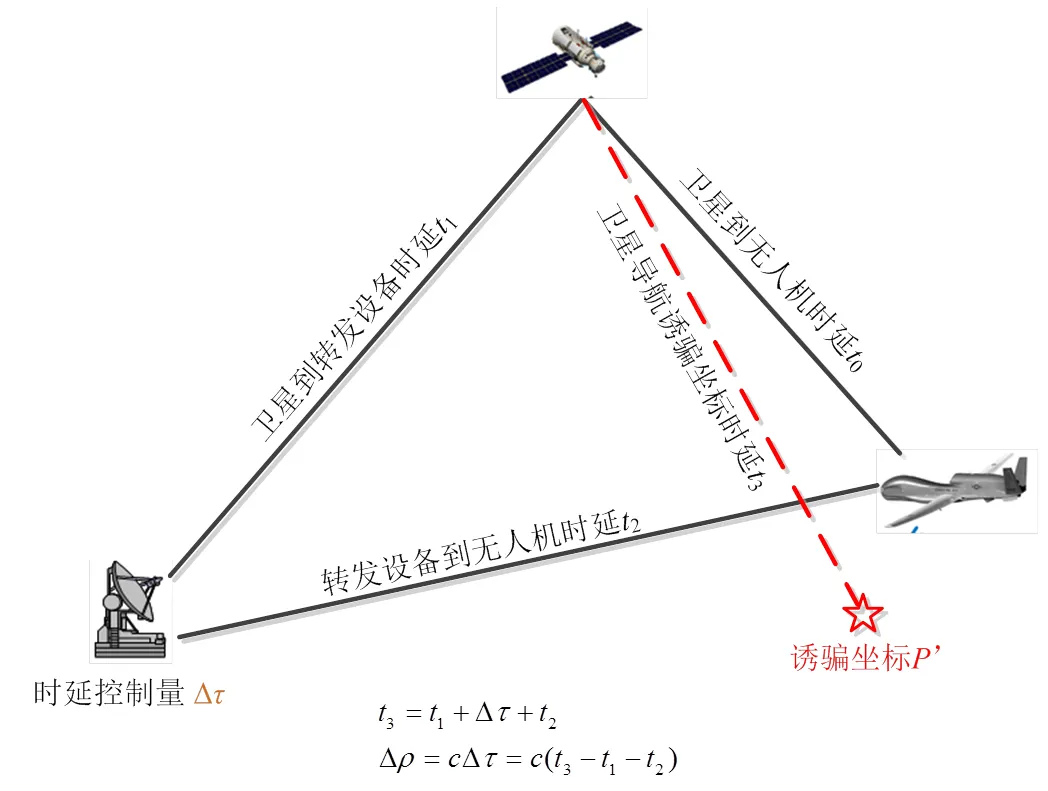
图4 第i颗卫星的转发时延量的计算
3 转发延迟控制范围
在转发欺骗干扰中,由于信号需要在转发设备中存储一定的时间再播发出去,因此,硬件设备的资源存储能力决定了转发时延量的最大值。为了实现转发式欺骗干扰能力,需要对具体应用场景进行分析,确定转发时延量的最大值,为后续的硬件设计提供参考。
以图5为例,位于点的无人机同时接收到GPS 2号、5号、13号、15号、17号卫星信号,无人机利用这些信号对自身进行定位解算,可得到自身当前的位置坐标。无人机接收到的卫星信号伪距分别为、、、和,转发设备对信号进行时延后,使到达无人机的伪距分别变为、、、和。
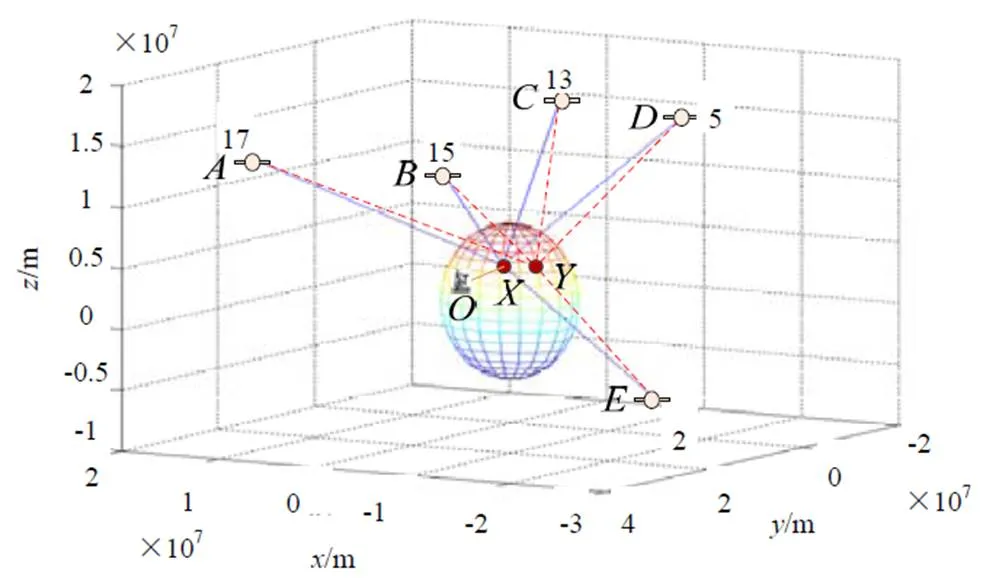
图5 转发欺骗场景
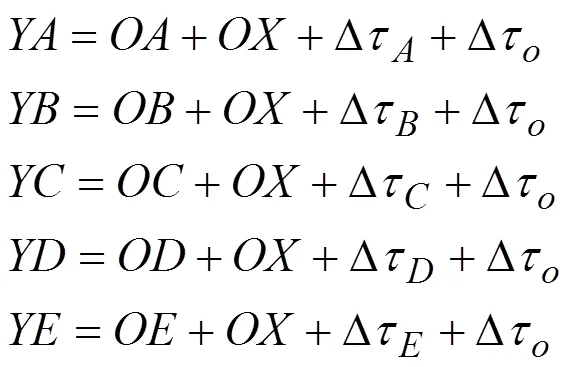
根据前文分析,为了实现转发式欺骗,各颗卫星的转发时延量计算如式(7)所示:
在不考虑转发设备与无人机距离OX的情况下,忽略修正量,各颗卫星的转发延迟的大小如图6所示。从图6可以看出,随着欺骗位置距离的增加,转发时延量也随着增大。
由图6可以看出,当各颗星的转发时延量控制在0.03 ms内时,可以产生距离无人机真实坐标 10 km距离的转发欺骗坐标,这种情况已完全满足转发欺骗的使用场景。
如图7所示,当要产生伪距为的转发信号时,转发延迟为-,当为10 km时,由于卫星一般运行于20 000 km的高空,因此、远远大于,根据几何关系可知,欺骗位置引起的转发延迟会很小,也就是上文仿真得出的0.01 ms的量级范围。

图7 转发延迟量示意图
当考虑到转发设备与无人机距离时,信号在方向的传播时延会随着距离的增加而接近线性增加。当两者距离=100 km时,其引入的转发时延大约为0.33 ms。
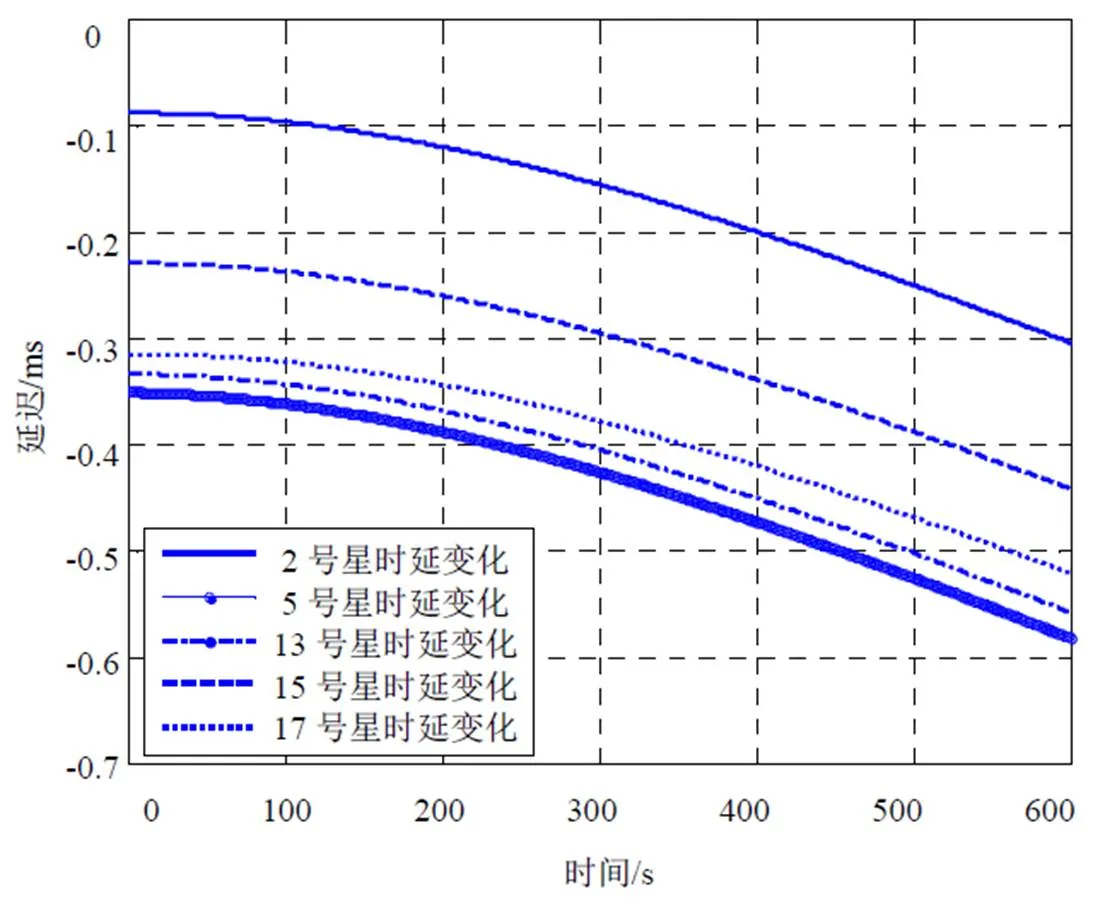
图8 转发时延变化范围

4 转发实验验证
为了充分验证转发欺骗效果,我们构建了半实物仿真测试环境,如图9所示。

图9 转发时延仿真测试
首先利用多通道接收机,对天线卫星数据进行采集,采集的数据信息主要有星历数据、时间数据、伪距数据以及位置数据等。
计算机1将采集到的数据通过串口发送给计算机2,计算机2上运行有转发时延计算程序以及一个GNSS软件接收机程序。
计算机2首先根据星历、时间和伪距数据信息,利用GNSS软件接收机计算本地位置坐标,该坐标与实际接收机上报的位置数据包进行对比,以验证软件接收机的正确。对比结果如图10和图11所示。
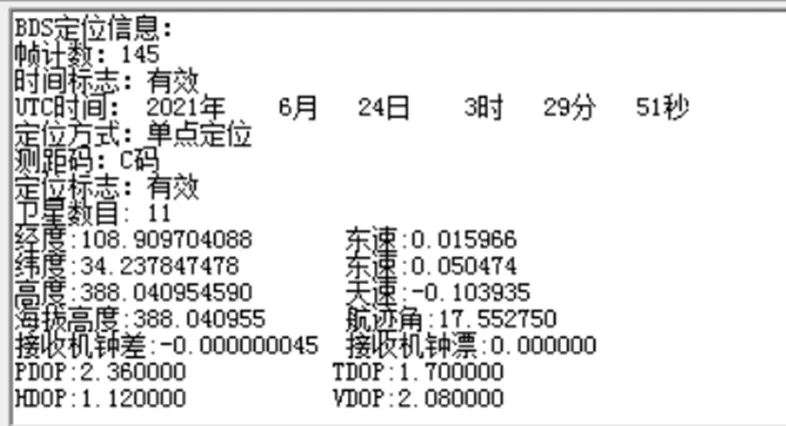
图10 实际接收机定位结果
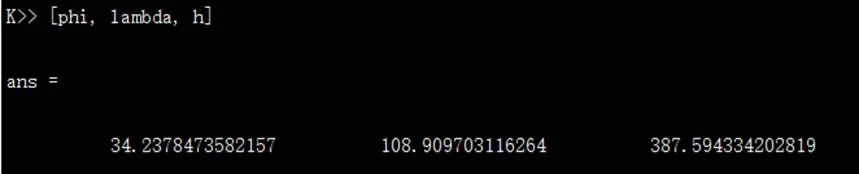
图11 GNSS软件接收机定位结果
通过对比可知,GNSS软件接收机与实际接收机定位结果误差在1 m以内,因此可认为GNSS软件接收机定位解算正确有效。
设置转发坐标,转发坐标与实际定位坐标的纬度、经度、高度分别相差1°、0.01°和1 000 m(直线距离约为110 km左右)。根据转发坐标计算卫星信号时延量,如图12~图15所示。
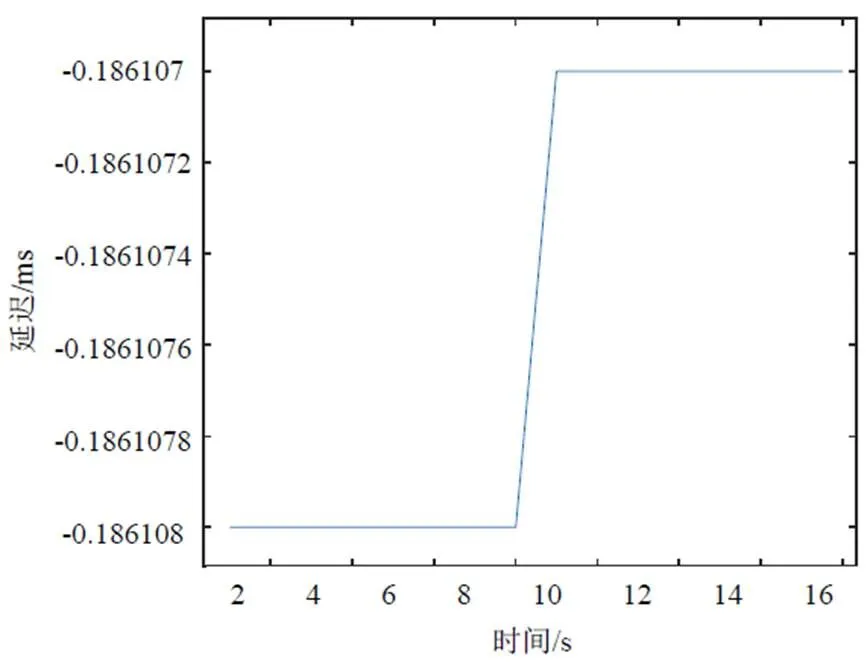
图12 北斗1号星转发时延
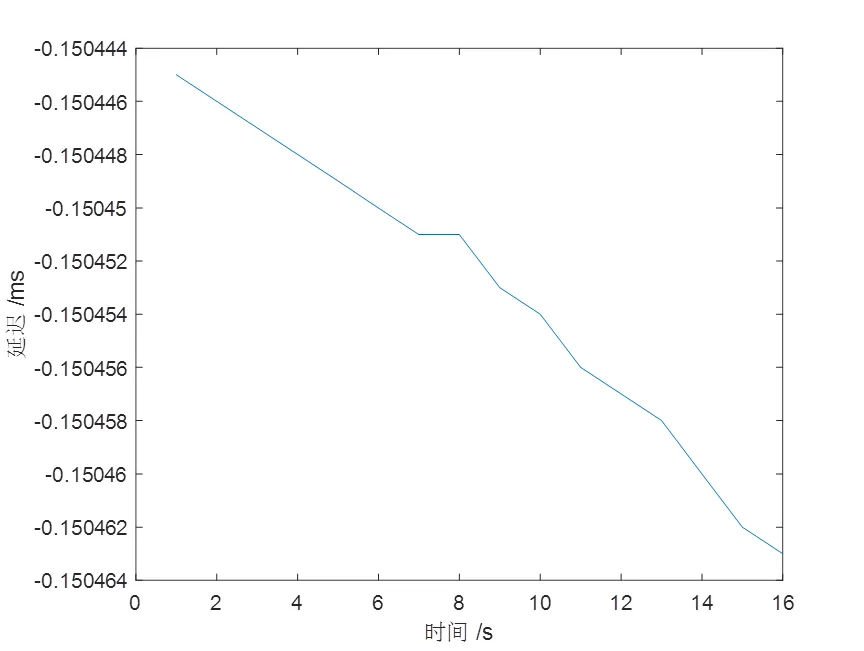
图13 北斗2号星转发时延
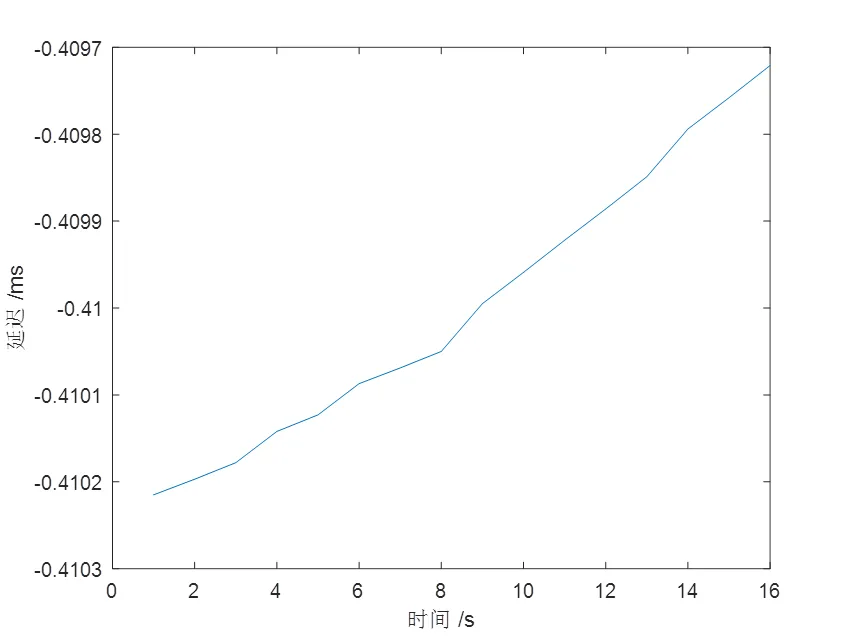
图14 北斗6号星转发时延
由图12~图15可知,当转发坐标位于100 km外时,转发时延量在零点几毫秒量级。与前文分析一致,此时转发时延大小的主要因素为转发设备与目标之间的空间距离。
GNSS软件接收机利用转发信号的定位结果如表1所示。
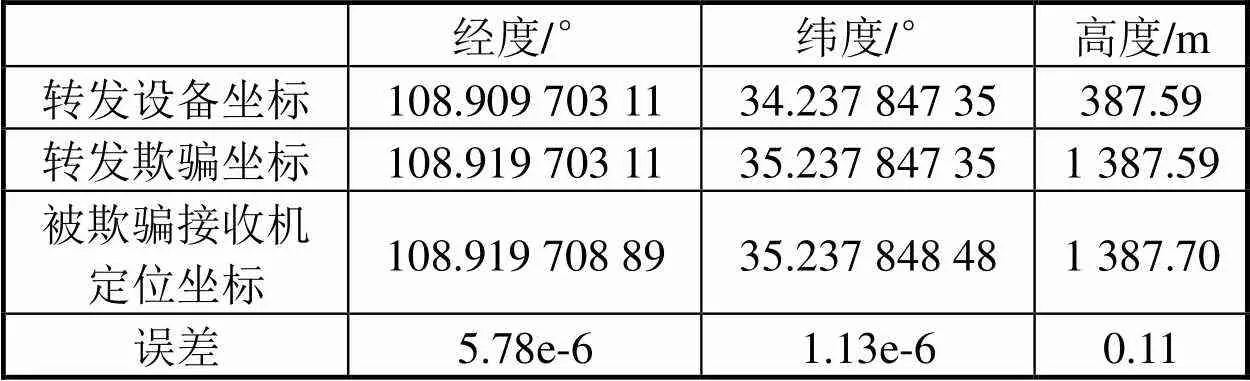
表1 转发欺骗实验结果
从表1可以看出,通过对各颗星进行不同的时延控制,信号转发后,被欺骗接收机的定位坐标与转发设备预设的坐标几乎相同,其中经度和纬度误差为10-6度量级,也就是米量级,高度误差在分米量级。
5 结论
本文对军码转发欺骗干扰中的卫星时延控制进行研究,在介绍转发欺骗干扰原理的基础上,给出了转发时延量的计算方法,并分析确定了转发时延的最大范围。最后通过半实物仿真实验,验证了算法的正确性,最终的转发误差在米级精度,为后续转发设备的硬件实现提供了理论基础。
[1] 杨景曙,曾芳玲,盛琥,等. 通过区域映射实现诱导的GPS干扰系统[J]. 电子学报,2005,33(6):1036-1039.
[2] 刘天庆. GPS转发欺骗式干扰时延控制算法研究[J]. 现代导航,2016(3):166-167.
[3] 张宁. GPS 转发欺骗式干扰应用于无人机的实例分析[J]. 中国航天,2015(7):40-42.
[4] 闫占杰,吴德伟,刘海波,等. GPS转发欺骗式干扰时延分析[J]. 空军工程大学学报(自然科学版),2013,14(4):67-70.
[5] Y. Guo, M. Wu, K. Tang, et al. Covert Spoofing Algorithm of UAV Based on GPS INS Integrated Navigation[J]. IEEE Transactions on Vehicular Technology, 2019, 68(7): 6557-6564.
[6] 鲁郁. 北斗/GPS双模软件接收机原理与实现技术[M]. 北京:电子工业出版社,2016.
Time Delay Control Method for GNSS Repeater Deception Jamming
ZHENG Chen, WANG Qiong, JIANG Yu, WANG Xiaoyu
UAV (Unmanned Aerial Vehicle) deception technology based on satellite navigation is attracting more and more attention in Modern Navigation Warfare. Among them, repeater deception jamming is more valuable than generative deception jamming in the field of military code navigation, because it does not need to obtain priori information of signal structure. At present, the repeater of military code signal is generally carried out fixed-point static forwarding based on the position coordinates of the receiving antenna. However, this method has low signal confidence and poor jamming effect when spoofing UAV. A time delay control method of repeater deception jamming algorithm is proposed in the paper. The time delay of different satellite signals is calculated according to the requirements of repeater coordinate. And the repeater coordinates can be adjusted in real time according to the deception strategy to improve the success rate of jamming. Finally, the experimental results show that the repeater coordinate error calculated by the proposed algorithm is in the range of meters, which proves the effectiveness of the proposed algorithm.
Repeater Deception Jamming; Time Delay Control; Modern Navigation Warfare; Satellite Navigation
P228
A
1674-7976-(2022)-02-079-06
2022-03-07。郑晨(1988.05—),陕西西安人,博士,高级工程师,主要研究方向为卫星导航、无人机欺骗干扰。