基于虚拟胸腔镜的肺癌手术导航系统和全电视胸腔镜根治术对早期肺癌疗效比较
2022-06-05胡为才郭嘉嘉
胡为才,王 新,郭嘉嘉
阜外华中心血管病医院胸外科 郑州 451460
目前肺癌仍然是全世界范围内发病率和死亡率最高的恶性肿瘤,早期手术根治性切除对提高患者的生存率具有重要的临床意义[1]。随着肺癌早期筛查技术的进步和胸腔镜微创技术的发展,全电视胸腔镜根治术(video-assisted thoracoscopic radical surgery,VATS)被证实与开放术式和胸腔镜辅助术式有相当的临床安全性和预后获益[2-3],并且手术切口从三孔、二孔到单孔的应用越来越成熟,患者的创伤更小、术后康复更快[4]。精准切除早期肺癌尤其是最大直径<20 mm的纯毛玻璃结节所在的肺段,可最大程度保留肺功能,减轻肺部创伤[5-7]。既往研究[8-9]证实,通过术前高分辨率计算机断层扫描(high resolution computed tomography,HRCT)图像数据进行三维重建,以此模拟手术切除过程并制定恰当的手术切除路径,可以提高手术精确度,实现肺段切除。但术前三维重建与术中实时观察到的肿瘤范围仍有一定误差,增加了术中调整的次数和手术难度[10]。基于此,我们提出了一种基于虚拟胸腔镜的肺癌手术导航系统:由三维位置跟踪器和虚拟胸腔镜系统组成,三维位置跟踪器用于识别真实胸腔镜的位置,虚拟胸腔镜系统根据术前CT图像数据生成虚拟胸腔镜视图,结合这两种技术进行术中患者-图像校准,生成与真实胸腔镜视图同步的虚拟胸腔镜视图,进而提高术野实时可视化和安全手术切缘的可靠性[11-13],现将结果报道如下。
1 对象与方法
1.1 研究对象回顾性总结2018年4月至2020年8月阜外华中心血管病医院胸外科收治的早期肺癌(最大直径<20 mm)患者共134例,其中70例接受全VATS(对照组)进行治疗,另外64例采用基于虚拟胸腔镜的肺癌手术导航系统(观察组)进行治疗。
病例纳入标准:①年龄>18岁,KPS评分>75分,ASA分级Ⅰ~Ⅱ。②有胸腔镜根治术的应用指征,术后均康复出院。③术前CT影像资料清晰、完整。④签署手术同意书,临床和随访资料完整。排除标准:①肺部转移瘤、多发性肺癌、肺癌病灶不能根治性切除。②合并肺功能障碍、心肝肾功能损伤、凝血功能异常、自身免疫性疾病、营养代谢性疾病。
1.2 手术方法所有患者术前完善CT检查,确定肿瘤位置、毗邻结构、是否有淋巴结转移等信息。对照组采用全VATS标准术式;观察组采用基于虚拟胸腔镜的肺癌手术导航系统,具体流程如下:①术前获得HRCT图像数据。②对数据进行后处理分割,强调在虚拟胸腔镜视图中显示重要的解剖学结构,即在虚拟胸腔镜视图上提取并绘制术前肺癌面积和安全手术切缘的最佳切除线。③根据HRCT图像数据,构建虚拟胸腔镜视图,通过双端口视频输出,使真实视图与虚拟视图同步匹配。④在胸壁上使用手术导航系统确定最佳切除线的标志,使用连接到镊子的电动手术刀进行雕刻。⑤利用最佳切除线的标志进行肺段切除,以获得足够的手术切缘(为了降低局部复发的风险,建议手术切缘为超过导航系统确定最佳切除线2 cm)。
手术导航过程中,位置信息连续发送到虚拟胸腔镜系统。使用患者-图像校准将三维位置跟踪器中的胸腔镜和镊子信息转换为基于术前HRCT图像的坐标系,使用点对点匹配的校准方法得到该变换矩阵[14]。共选择了6个或更多的解剖标志作为校准的基础(主要位于胸部,包括体外和胸腔内),并通过三维位置跟踪器进行标记,然后手术导航系统生成基于术前HRCT图像的虚拟胸腔镜视图。通过交换多张CT图像数据使用快速渐进式直接体绘制实时显示虚拟胸腔镜视图。手术导航系统能够提供虚拟胸腔镜视图与患者-图像校准后的真实胸腔镜视图并进行同步,然后导航系统获取通过患者-图像校准计算3D位置跟踪器测量胸腔镜和镊子的变换矩阵,最后导航系统中的虚拟内窥镜使用转换的位置信息生成与真实胸腔镜位置相对应的虚拟胸腔镜视图[15]。
1.3 观察指标主要指标包括患者-图像校准的误差、切缘与肿瘤的距离以及首次切缘阴性率,次要指标包括平均手术时间、总出血量和并发症,电话或门诊方式随访1年肿瘤复发率和患者生存率,每3个月随访1次,无失访病例。
1.4 统计学处理采用SPSS 20.0分析数据,应用两独立样本t检验或χ2检验比较两组患者的一般临床资料、手术指标、肿瘤切除指标和随访指标(电话或门诊方式随访1 a,观察肿瘤复发率和患者生存率,每3个月随访1次,无失访病例)的差异;检验水准α=0.05。
2 结果
2.1 两组患者一般临床资料的比较见表1。

表1 两组患者一般临床资料的比较
2.2 两组手术指标的比较见表2。由表2可知,观察组手术时间、出血量和总并发症发生率均小于对照组(P<0.05)。观察组发生切口感染1例、支气管胸膜瘘1例、血管损伤1例、气胸2例;对照组发生切口感染2例、支气管胸膜瘘2例、血管损伤4例、气胸7例。
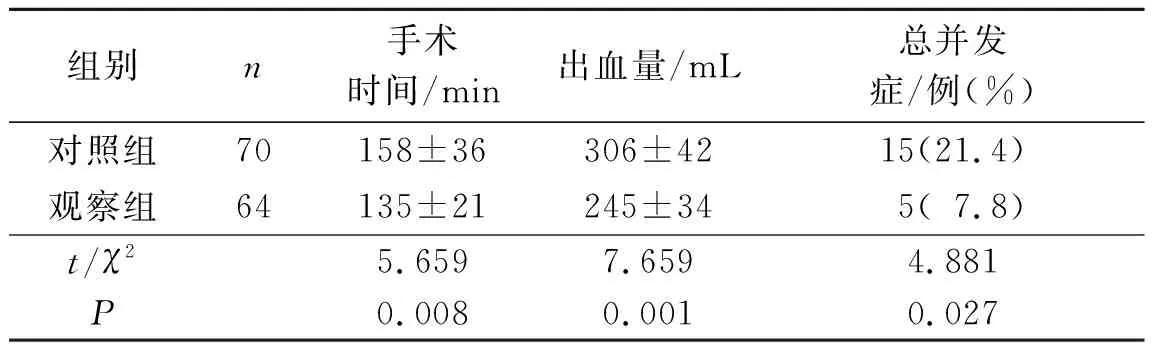
表2 两组手术指标的比较
2.3 两组肿瘤切除指标的比较见表3。由表3可知,观察组的患者-图像校准误差、切缘与肿瘤的距离小于对照组,首次切缘阴性率高于对照组(P<0.05)。

表3 两组肿瘤切除指标的比较
2.4 两组随访指标的比较术后随访1 a,无失访病例。观察组患者肿瘤复发4例(6.3%);生存62例(96.9%),死亡2例(3.1%)。对照组肿瘤复发14例(20.0%);生存60例(85.7%),死亡10例(14.3%)。观察组肿瘤复发率低于对照组,生存率高于对照组(χ2=5.436、5.108,P<0.05)。
3 讨论
尽管利用术前HRCT图像数据可以进行多种后重建处理,但我们也发现重建图像与术中实际肿瘤浸润范围存在一定误差,从而影响最佳手术切缘的制定。基于CT图像数据的导航系统在神经外科和胃肠外科领域已有报道[16-17]。本研究提出了一种基于虚拟胸腔镜的肺癌手术导航系统,与VATS同时启动,虚拟胸腔镜视图与真实胸腔镜视图同步,显示“治疗前肺癌的侵犯区域”和“获得安全手术切缘的最佳切除线”;同时还支持虚拟图像上镊子尖端的可视化,我们使用电动手术刀标记最佳线进行肺段切除,并留有足够的手术边界;为提高早期肺癌患者精准肺段切除手术的安全性提供了较好的选择方案,同时利用该手术导航系统也提高了外科医生的信心,有望将该导航系统推广到局部晚期肺癌或者其他恶性肿瘤患者的手术切除中,具备临床推广应用价值。
本研究结果显示,观察组手术时间、出血量和并发症发生率均小于对照组,提示基于虚拟胸腔镜的肺癌手术导航系统提高了手术的微创性和安全性。观察组患者-图像校准的误差、切缘与肿瘤的距离小于对照组,首次切缘阴性率高于对照组,提示该手术导航系统能够最大程度还原术前肿瘤的真实形态结构(包括最大直径、体积、邻近重要结构等),有利于制定最佳的手术切缘,保证安全的手术边界和切缘阴性,同时减轻对肺部的创伤。作者体会:为了强调虚拟胸腔镜视图中的重要解剖结构(如肿瘤的原始区域和最佳手术切除线),建议手术导航系统使用不同的颜色突出显示分割的解剖区域,术前通过追踪HRCT图像或虚拟胸腔镜视图手动分割这些特定解剖结构。
观察组随访期间肿瘤复发率低于对照组,患者生存率高于对照组,提示该手术导航系统并不会增加肿瘤复发的风险。当然,我们也需要注意,由于术中虚拟胸腔镜的位置信息不稳定,导航系统可能无法检测到胸腔结构[18];肺和最邻近的结构不固定,术中容易被不停跳的心脏或变化的肺通气所影响[19-20]。目前手术导航系统主要用于早期肺癌尤其是最大直径<20 mm的纯毛玻璃结节,因为肿瘤位置局限且较小,不易变动,也减少了肺部或者胸部组织的遮挡,更易实现精准肺段切除。
综上所述,基于虚拟胸腔镜的肺癌手术导航系统治疗在提高早期肺癌术野实时可视化和安全手术切缘方面有较好的优越性,有利于确定肺段和段间平面,实现精准肺段切除,也有利于减轻手术创伤、改善患者临床预后。
