基于高精度地图及多传感器融合定位的车路协同应用实践
2022-06-05姚海敏陈建华
姚海敏 冯 霏 陈建华
1 上海勘测设计研究院有限公司,上海,200434
2 中移智行网络科技有限公司,上海,201206
3 河海大学土木与交通学院,江苏 南京,210098
近年来,城市商业综合体、办公园区停车难问题越发突出,车位不足、停车难、缴费排队等问题困扰着都市车主,原因包括车位数量有限、车位使用率低等。为了解决停车难问题,国内学术界和产业界都做了很多研究。张春菊等[1]针对城市的停车难题,提出了互联网+智慧停车的解决思路;张明慧等[2]设计了比较智能化的停车系统。但目前这些智慧停车研究侧重于车位管理、车位预约、路径规划等方面,对于车位诱导的研究局限于停车场内片区级大粒度的诱导,对于车位级的泊车诱导和轨迹规划研究比较欠缺。实现车位级泊车诱导和轨迹规划的基础是实现停车场的室内外车辆高精度定位。
车路协同技术是当前国内实现自动驾驶、缓解城市交通拥堵的主流技术。本文将车路协同技术引入停车场车辆定位研究,通过采集园区高精度地图,利用全球导航卫星系统(global navigation satellite sys⁃tem,GNSS)、路侧多传感器感知及融合定位技术,实现城市地面、地下停车场场景下的车辆高精度定位,为智慧停车系统提供车位级诱导、行驶安全预警功能,改善停车效率,解决找车位和停车难等问题。
1 总体技术路线
对于车路协同系统的众多特定功能及应用方向,车辆定位是一个十分重要的基础性问题。采用视觉感知定位技术可实现道路、停车场全覆盖的机动车、非机动车和行人的感知与定位。但由于视觉定位相机安装角度以及不同车辆几何形状的差异,所获取的车辆几何中心点坐标推算误差较大。位置精度还与车辆大小、车辆与摄像头的距离有关,所以定位精度除了受传感器姿态误差的影响外,还受车辆中心归算误差的影响。
为了提升定位精度和可靠性,结合多种定位手段,利用各传感器的技术优点,取长补短,通过对多种定位结果融合处理,实现连续、稳定、可靠的定位。在路口、停车场、车库出入口等重点部位提高感知能力和定位精度,安装激光雷达(light detection and ranging,Li DAR)、超宽带(ultra wide band,UWB)定位系统,实现场端传感器对机动车、非机动车、障碍物的连续可靠感知定位。此外,还可以通过融合Li DAR的测速数据保障车辆较高的速度感知精度。总体技术路线见图1。
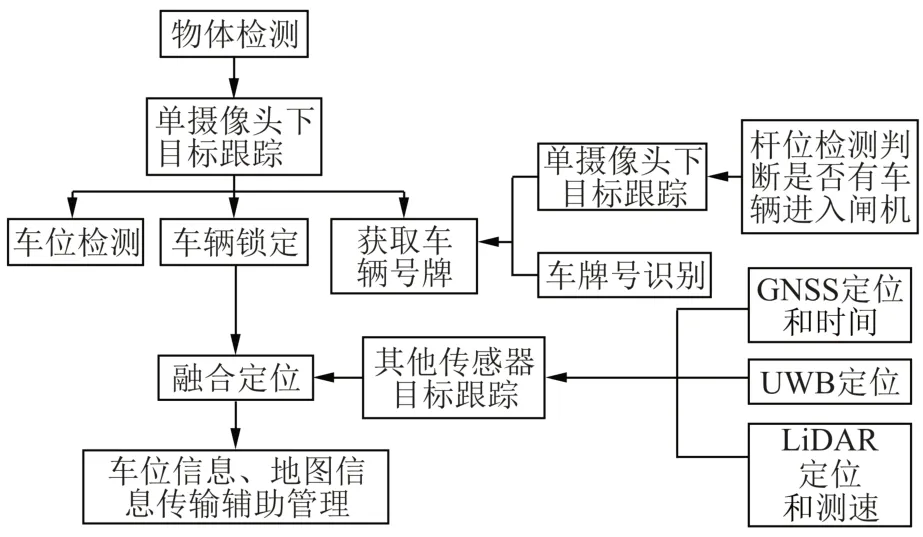
图1 总体技术路线Fig.1 Overall Technical Route
高精度地图是车路协同演示、路径规划的基础支撑,一般使用集成GNSS+LiDAR+惯性测量单元(inertial measurement unit,IMU)的测绘车采集地图数据。要保证车辆在地图上准确显示,地图精度和定位精度是关键。为防止高精度地图和GNSS定位系统之间产生系统偏差,这部分工作必须统筹有序进行。测量相关工作流程见图2。

图2 测量工作流程Fig.2 Workflow of Measurement
1.1 高精度地图
相较于普通导航电子地图,适用于自动驾驶的道路高精度地图具有更高精度、更加详细的地图元素以及更加丰富的属性,对于无人车定位、导航、控制及安全至关重要,是自动驾驶的核心技术之一[3,4]。
在地图采集工作开始前,需要利用已知点进行校核,以保证坐标系统一致。可通过在园区内布置足够的校正点、比对点进行地图纠偏和精度检验,特别是要保证车辆行驶的道路、停车位附近以及地下车库的误差在容许范围内。
1.2 GNSS定位及坐标系
GNSS技术具有受天气影响小、精度高、采样率高、全天候以及连续监测的优点[5,6]。中国北斗二号卫星于2012年底建设完成,是GNSS家族里面的新鲜血液,与其他导航系统相比,具有GEO、IGSO和MEO三星座,能够播发三频信号,可提供通信服务。北斗导航系统的加入为实现多系统GNSS导航与定位提供了可能[7]。GNSS实时动态(real⁃time kine⁃matic,RTK)定位精度可靠,是室外空旷地区实现厘米级定位的首选。
车路协同项目中,为了各系统能协调工作,需采用统一的坐标系统和转换参数。如果无条件建立独立的参考站,需要接入长期稳定的GNSS信号源,并在园区内建立稳定的控制点,以便长期比对,保证系统长期稳定地运行。为了便于后期使用,园区内使用同一套坐标投影参数,保证大地坐标和二维平面坐标的灵活转换。
在室外空旷环境,GNSS能提供米级至厘米级精度的定位结果,但在如室内、林荫道及城市峡谷等多路径效应、信号漫反射严重的环境中无法提供连续高精度定位结果。在受遮挡的驾驶区域,需要结合其他可连续工作、稳定性高的定位手段。
GNSS从搜星解算到获得固定解需要一定时间。在确定其他定位传感器的安装位置前,要对园区内道路进行RTK定位测试,对于定位结果较差的区域,需要使用其他定位手段进行辅助。因此,实现园区内自动驾驶,除GNSS定位外,一般需要结合惯性导航、视觉传感器、地图辅助等手段实现车辆定位[8]。
1)路侧传感器。为使各传感器获取的坐标在统一的坐标系统内,要对摄像头、UWB系统、Li DAR进行内外参数的标定和坐标转换,实现空间基准的统一。
2)摄像机。摄像机可通过深度学习技术提取车辆图像信息,并得到车辆在影像中的坐标,通过摄像头标定参数和相机成像模型可将影像坐标转换至统一坐标系统。
摄像机标定算法是利用摄像机当前视野下的区域内点位对摄像机进行标定,以定义摄像机相对于世界坐标系下的当前位置、姿态(位姿)矩阵,该矩阵能够解释像素坐标系到大地坐标系之间的转换关系。因此,将图像中某点的像素坐标代入矩阵进行运算,就可以计算出该点在大地坐标系下的位置。摄像机融合示意图见图3。

图3 摄像机融合示意图Fig.3 Diagram of Camera Fusion
3)UWB。目前,关于室内停车场车辆定位系统的绝大部分研究使用的技术为射频识别(radio fre⁃quency identification,RFID)、蓝牙、Wi Fi、Zig Bee、串联样式表(cascading style sheets,CSS)和图像处理等[9⁃12]。这些技术存在精度低或实现复杂等问题。然而,UWB技术利用纳秒至微秒级别的脉冲传输数据,时间分辨率高,在复杂多径环境中,可以达到厘米级定位精度,能有效解决上述问题[13]。因此,本文将UWB技术运用至室内停车场车辆定位,设计并实现了一套UWB定位系统,如图4所示。
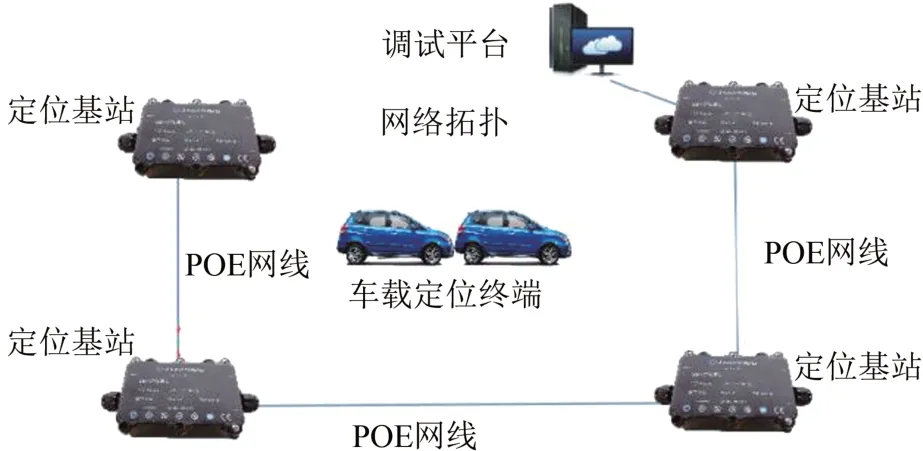
图4 UWB定位系统Fig.4 UWB Position System
主动定位基站以一定频率广播发射UWB信号,固定在车辆顶部的定位天线接收信号,同时传输给解算终端JBOX。JBOX根据定位算法进行位置解算,再将解算出的车辆位置坐标输出给车载网关等设备。
UWB定位主要被应用于GNSS信号无法有效覆盖且又对定位精度要求比较高的场景中,例如地下车库的厘米级定位。融合定位的关键部位主要是与GNSS定位覆盖区域衔接的位置。
测量时,利用全站仪将控制点从室外引测到地下车库,如果涉及三维显示,需要引测三维坐标,即考虑车库和地面的高差。涉及到多传感器标定时,宜统一考虑传感器位置布设控制点,以便测量传感器坐标和验证点坐标。
根据UWB工作原理,UWB设备信号发射点的坐标精度是保证UWB定位系统精度的关键,因为UWB工作的区域一般没有GNSS信号覆盖,需要使用全站仪测量,此过程中最重要的是大地坐标和地方坐标投影转换,需要根据园区内统一的控制点坐标和投影方式来起算和转换。
4)Li DAR。获取物理模型的三维点云的常用手段是Li DAR,它具有精度高、分辨率高、测距准等优点[14],可快速、实时获取被测物体的三维空间信息,被广泛应用于医疗、农业、机器人导航、建筑、自动驾驶、地质勘探等领域[15]。
场端Li DAR标定难度大,需要使用专用的工具,标定板为立体标定板,加工精度高,标定过程复杂,在户外使用时携带不方便[16]。
在室外使用障碍物标定时,尺寸小的标定工具不能被雷达识别,无法显示在后台。大的标定工具又比较难确定特征点位置,标定点本身的坐标精度不够势必导致解算出的Li DAR姿态参数不精确。
2 项目实施与结果分析
本文场景为综合园区,涉及园区地面、地下车库两部分。通过在场端(路侧)部署智能摄像头、Li DAR、UWB定位系统,结合园区闸口车牌识别系统、停车位地锁系统,实现对园区车辆的连续定位、视频监控、车位检测、闸机升降识别、地锁自动升降等一系列功能,并将相关定位识别信息推送至场端管控平台,由场端管控平台为进入园区的车辆进行内部车位分配、路径规划,同时将生成的全局规划线路下发给车端用户应用程序(application,APP),引导车辆行驶至分配的停车位,并在停车后降下地锁,实现车辆停车入位。系统设备物理拓扑见图5。
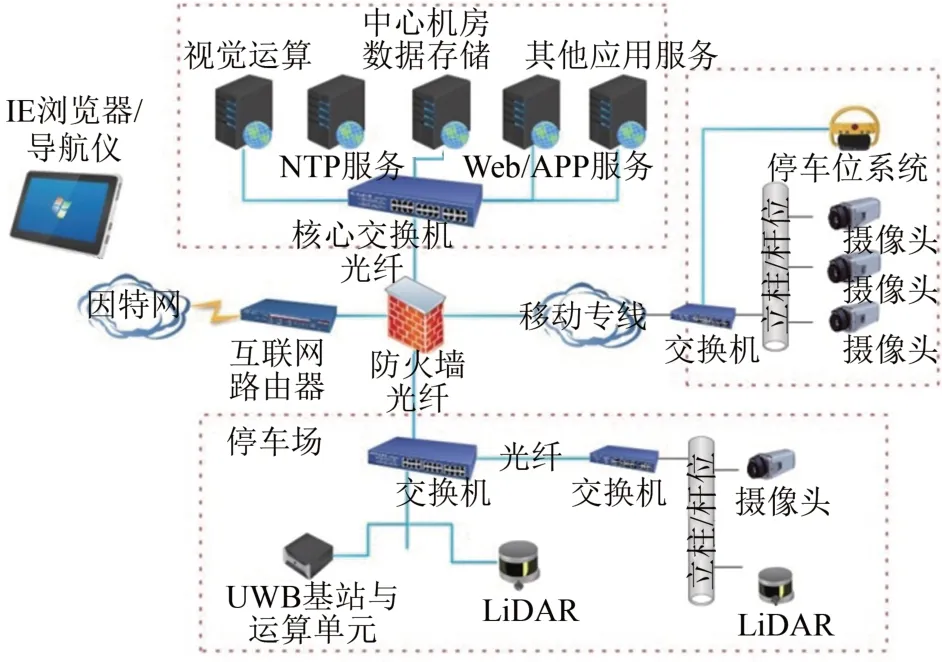
图5 系统设备物理拓扑图Fig.5 Topological Graph of Equipments in the System
2.1 GNSS覆盖情况
为得到稳定的厘米级定位服务,本文在园区某栋楼顶建立了GNSS参考站,为园区及周边环境提供RTK差分信号播发。RTK定位固定解测试情况见图6。

图6 产业园区GNSS RTK固定解测试情况Fig.6 Testing Results of GNSS RTK Fixed Solutions in the Industrial Park
数据融合的另一个条件是统一的时间基准,这跟授时息息相关,结合时间同步服务器和GNSS授时可实现感知与定位信息时间基准的统一。
2.2 摄像头标定方法
打开标定摄像机的视频流,在摄像机有效作用范围内,沿着道路方向均匀选择6~20个标定点,以确保相邻两个摄像机的融合精度。室外优先选择GNSS RTK形式,在地下车库或者其他不具备条件的位置选择全站仪测量坐标。尽量选择环境特征点,便于后期找到点位用于验证。记录每个点的坐标,同时用摄像机截图保存。
摄像机获取的物体坐标精度受被捕捉对象大小、角度等因素影响,特别是摄像头的切换融合过程。视频捕捉示例见图7。
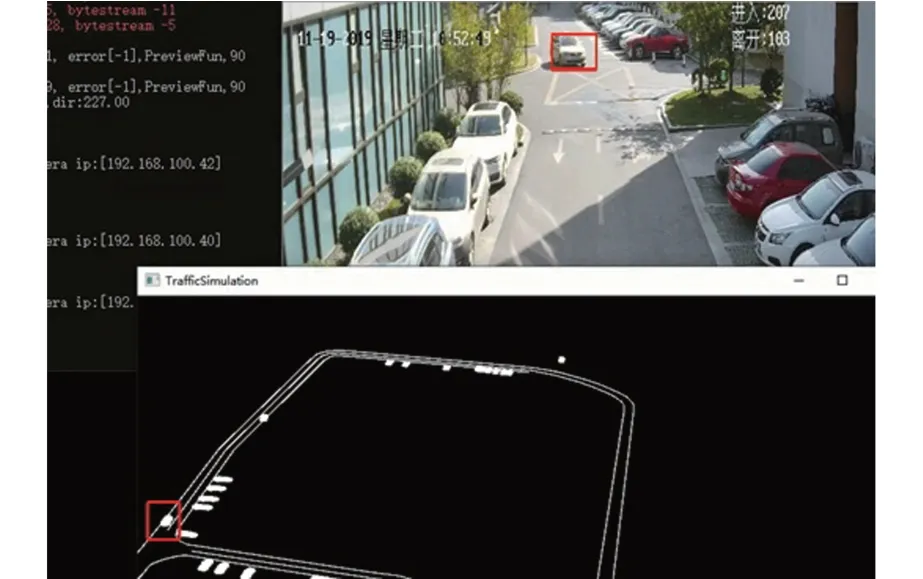
图7 视频捕捉示例Fig.7 Example of Video Capture
经过测试,通过摄像机获取的识别对象静止状态下的坐标误差在16~43 cm之间,精度优于35 cm的占88%;动态精度下的坐标误差在25~66 cm之间,90%的采样坐标误差在60 cm以内。
2.3 UWB测试
1)静态精度测试。设备设置完成后,先要考虑静态精度,将GNSS RTK或全站仪测量的验证点作为已知点,比对UWB标签测量的坐标,评定静态精度指标。实验表明,点位静态偏差可控制在20 cm以内。
2)动态精度测试。动态精度测试对项目整体运行效果至关重要,但也是难点,速度验证非常困难,主要原因是需要足够长度的轨道。实验中,单车依规划线路行驶,经验证,结果也较为理想,结合静态测试,可将其作为完整的验收依据。
轨迹可准确地显示存在问题的区段,经过多次实验发现,在坡道处存在40 cm左右的抖动,如图8所示。通过整改解决了此问题,由此可见,动态测试非常关键。
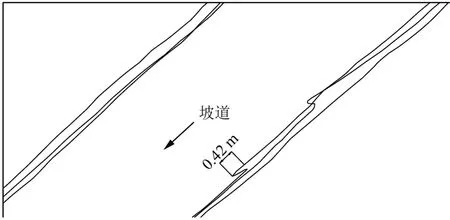
图8 坡道定位抖动点Fig.8 Positioning Jitter Points on the Ramp
2.4 Li DAR标定
Li DAR的特点是单点测距精度高、数据刷新快,但固定安装于场端进行定位时,受到激光束数量的限制,特别是线数较少的Li DAR,工作距离短,静止物体识别率低。所以本文实验Li DAR辅助定位主要安装在关键区域的出入口,用于车辆测速。
如图9所示,Li DAR的覆盖范围有限,而且激光束随着距离增加变稀疏,根据经验,尽量选择雷达覆盖范围内的较远点来标定,以减小因标定点坐标不准导致的角度误差。因此,场端使用Li DAR时,必须考虑雷达的线数,距离雷达越远,雷达的分辨率越低。实验结果表明,16线LiDAR在单侧40 m范围内定位精度可达30 cm。
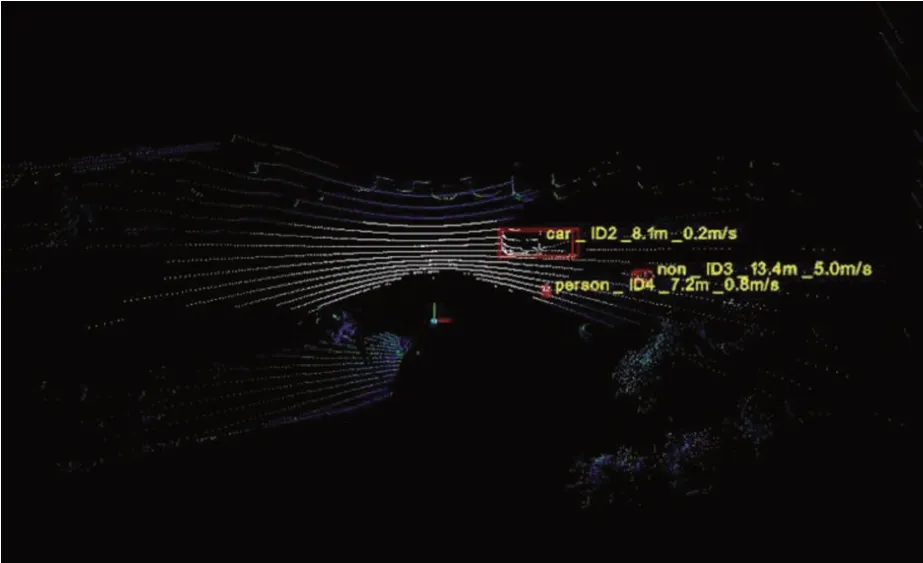
图9 Li DAR识别场景Fig.9 Scene of LiDAR Recognition
综合传感器的标定情况,各传感器的标称精度与实际工作精度存在很大偏差,原因包括特定使用场景和标定手段。要想提高融合精度,除了选用精度更高的设备外,还要找到更为合理的标定方式,采用更加完善的算法。同时还要对不同传感器的定位结果进行融合,以实现连续、可靠的定位能力。
将多传感器数据进行融合时,必须掌握各数据源的精度。融合无法提升各传感器的性能,但可以根据不同环境条件和业务场景选择效果最优的传感器,以便算法决策采用哪一数据源。当一个点位同时返回多个传感器数据,并且判断都满足融合条件时,使用的优先级如下:RTK固定解>UWB>LiDAR>摄像机。根据测试情况,各区段最优信号源见图10。

图10 各区段优选信号覆盖情况Fig.10 Coverage of Preferred Signals in Each Section
3 结束语
1)统一坐标系统和转换参数是基础,项目开工前必须事先确定。
2)为保证地图精度,可利用GNSS RTK和全站仪在重要部位均匀测设特征点用于地图纠偏。通过一系列精度控制措施,高精度地图精度可优于30 cm。
3)标定点的精度是传感器姿态准确的前提,GNSS RTK测量精度可以满足要求,方便快捷。地下车库等受遮挡的区域可采用全站仪引测标定点和验证点,平面精度控制在2 cm以内。
4)同一定位方式融合精度很重要,传感器需要有足够的重叠度,在静态精度有保证的基础上做动态测试。
5)不同定位方式的融合效果建立在各定位方式准确可靠的基础上,根据不同区段的场景和信号质量,由算法选择定位方式。
基于高精度地图的多传感器融合定位是车路协同的重要一环,各环节的融合精度取决于坐标基准、设备精度、融合算法等。精度低影响演示和使用效果;但过高的精度要求将导致投入增大。综上所述,适度的精度追求是车路协同降低门槛,得以推广应用的重要一环。本文在设备标定、融合定位、定位精度探索方面提供了一套可供参考的解决方案,有助于行业规范的建立。
