四自由度机械臂的轨迹仿真研究
2022-06-05丁子涵徐顾自
在工业4.0背景下,智能制造技术发展迅速,机械臂作为智能工厂的典型装备广泛应用于装配、焊接、喷涂和搬运等复杂生产过程中,贯穿工业自动化智能化生产的全过程
。机器人技术现在已经发展成为集机械制造、自动化工程、人工智能、虚拟现实技术、计算机技术等集于一体的学科。
本文基于ADAMS与MATLAB的联合仿真。首先建立笛卡尔坐标系,在MATLAB中对四轴机械臂做出轨迹规划并将样条曲线导入ADAMS软件中,得到的轨迹运动与MATLAB中一致,表明机械臂在ADAMS中可以很好地复制运动轨迹。
随着人类社会不断发展,化石能源的消耗不断增加,能源危机、环境污染等问题越发严重。近年来,随着潮汐能、太阳能等可再生能源的不断发展,作为影响其发展的关键技术,储能系统越来越受到人们的关注。其中,二次电池以其效率高、使用方便等优点成为最具潜力的储能方式。已经趋于商业化的二次电池有铅酸电池、锂电池、钠电池等,锂电池因能量密度高、自放电小、安全无污染等优势已经在通信电子产品领域得到大规模应用。然而大规模工业储能需要储能器件满足2个基本要求:一是安全性高,没有安全就没有储能的未来;二是成本低,任何技术的发展必须考虑成本问题。
1 建立机械臂数学模型
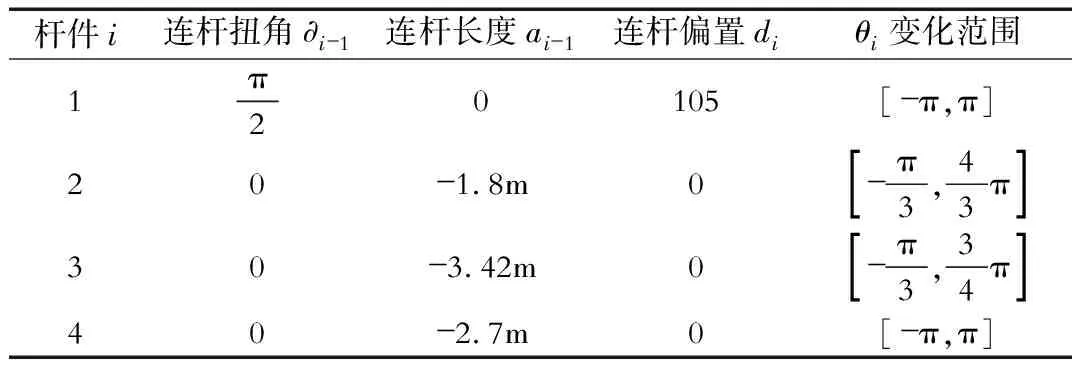
本文所研究的机械臂是由4个旋转关节组成的,即4自由度。首先在NX 12.0中建立并装配机械臂的三维模型。建立好模型后使用标准D-H参数法建立连杆坐标系,D-H参数由Denavit和Hartenberg发明,是一种常用的描述机器人相邻两个连杆之间参数关系的方法
。
表1中,∂
-1
为连杆转角,是绕
轴由
-1
转向
的角度;
-1
为机器人的连杆长度,是绕
轴由
-1
到
的距离;
为关节角绕
-1
轴由
-1
到
的角度;
为连杆偏距,是绕
-1
由
-1
到
的距离。
打开MATLAB中Robotics Toolbox工具箱建立机械手臂模型,定义机械臂名为“Scara”,定义初始角度四个关节的角度依次为 [0 0 -π/2 π/2];用LINK函数进行编程,建立连杆对象,编程语句如下:
L(1)=Link([0 d1 a1 alpha1]);
L(2)=Link([0 d2 a2 alpha2]);
机械手臂关节空间轨迹规划所研究的问题是,机械手臂末端在工作时,如何从起点出发,途径中间的插值点,最后到达终点
。合理的轨迹规划是机械臂运动过程稳定的重要保证,可以减少运动过程中的冲击与振动,保证机械臂运动的效率。机械臂关节空间运动轨迹规划方法有很多,常见的规划方法有多项式插值、贝塞尔曲线、线性迭代法等,其中多项式插值最常用的有三次多项式插值及五次多项式插值
。
L(4)=Link([0 d4 a4 alpha4]);
第二,电子巡检。电子巡检实现的背景为信息技术、遥测遥控技术等的不断发展。在电子巡检环节中,相关巡检人员要结合基于遥测遥控技术的系统平台,完成对航标状态的远程管理与监控。在这种巡检方式下,相关巡检人员不需要实际进入相应的海域进行作业,利用系统平台以及计算机就能够完成对相应海域中航标的灯质、电流电压、位置等信息数据的监测。在发现异常情况时,能够第一时间的进行通报,提升航标巡检工作的效率,也降低了航标巡检工作的危险性。
Scara=SerialLink(L,'name','Scara');
这样就可以得到4轴机械臂模型。
2 正逆解与工作空间分析
2.1 机械臂运动的正逆解
(1)
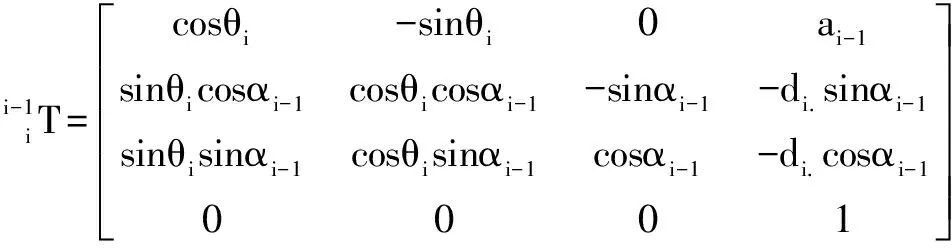
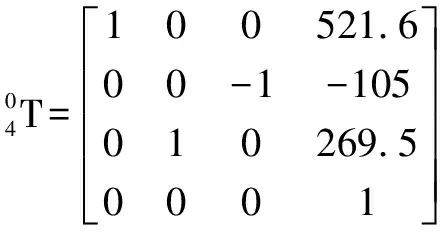
对机械臂进行运动仿真首先要对运动学分析,运动学分析是轨迹规划的前提,可以更好地控制机械臂的运动。对机械臂进行仿真前,需要推导出机器人的正逆运动学公式。正运动学利用各个转角的关系,求出机器人末端执行器的位姿。利用表1中D-H参数,以关节角度作为自变量,建立机械臂的正运动模型。机械臂相邻连杆件的变化矩阵为:
将上述四个矩阵相乘得到:
(2)
符合机械臂的实际位姿。
在我国现行经济体制下,建筑业的比重越来越大,建筑工程规模也越来越大。因此,为了保证建筑业的正常发展,我们必须做好项目成本的动态管理和控制。工程造价管理是整个工程建设过程中的核心环节,对整个工程有着重要的影响。无论是决策、设计、施工还是竣工,都非常容易受到项目成本管理的影响。因此,为了避免不必要的资金浪费,控制整个工程建设的成本,处理工程造价管理工作,是建筑业发展的必由之路。

逆运动学是在一定转角范围内,通过末端位姿矩阵解出各个关节的转角,逆运动学一般用于求解机械臂的轨迹规划,方程组的解是否存在取决于机械臂的工作空间。对于四轴机械臂来说,工作空间有限,不能达到三维空间内的所有位姿,所以部分位姿会出现无解的情况。
2.2 工作空间分析
机械臂的工作能力可以通过工作空间的分析来确定,在实际分析过程中,机械臂的末端在空间范围内所有的点的集合即是机械臂的运动空间
。
干巴爹:是日语“がんばって(顽张って)”的谐音。罗马音:ganbatte中文近似读音:gan ba te,所以中文音译名是“干巴爹”。表示“加油、努力”的意思,常用于比较亲密的人之间加油打气鼓励。
蒙特卡罗法是一种数值方法,常借助于随机抽样来解决数学问题,使用广泛。进行工作间计算可节省大量时间,例如随机生成30000个点只需要2到3分钟,该方法可以对各种类型的机械臂进行工作空间的分析。本文取N=3000对工作空间计算,该机械臂在X,Y,Z三个方向取值见下图1,图2,机械臂的运动空间见下图3。

3 机械手臂轨迹规划
L(3)=Link([0 d3 a3 alpha3]);
3.1 五次多项式插值
三次插值多项式在处理已确定的起始点和目标点的位姿、机械臂运动过程中速度与加速度的变化时往往无法满足要求,这时需采用五次多项式插值进行轨迹规划。要使机械臂末端执行器由初始位姿变化到目标位姿,需要求出各个关节角随时间的变化函数。
设关节的运动轨迹函数为:
HDPE管材运至施工现场后,管材卸车时,地面不应有石块等尖凸物并用废旧汽车轮胎铺垫,而后将管材逐根卸下,防止管材卸车时受伤。管材热熔焊接前应仔细检查待连接管材及管件,对严重划伤管材坚决不能使用,防止管道受压破损及以后使用中蠕变破坏。
=
+
+
+
+
+
(3)
在
时刻为初始位姿,
时刻为设定的目标位姿,设
时刻转角为
,
时刻转角为
。
含柔直系统的电网潮流优化控制以交流系统满足式(1)~(5)的各节点正常功率平衡及各种安全性不等式约束条件、柔直系统满足式(6)~(13)的工程运行约束条件的前提下,使系统网损最小。
带入约束函数方程为:
网络技术的发展,使得高中物理教学具有更多的可能。教师需要增加对于网络技术的了解,依据自身的教学目标,与网络技术相结合开展多样化的教学活动,提升学生对于物理学习兴趣,增强其专注度提升学习效率的同时,培养综合能力,实现较好师生关系的构建。
(4)
上述方程组的解为:
建立和完善实验室的各项档案,使其规范化和科学化,正确、全面反应实验室建设的历史,是非常必要和有意义的,但要维持完整的档案是非常困难的,而确认管理体系是否正常、有效和持续的运行,最终的考核都体现在档案(证据) 中。因此可以认定“实验室管理体系的建立”必须完善档案的完整[2]。
(5)
3.2 轨迹仿真
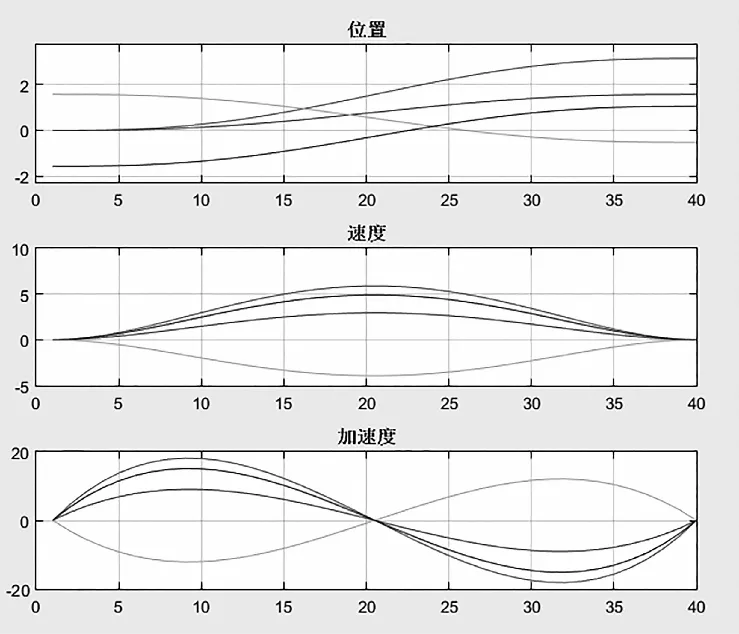
设每个关节初始运动速度,加速度均为0,利用JTRAT函数实现轨迹仿真,使其从初始位置 [0 0 π/2 -π/2]运动到[π/2 π -π/6 π/3],步长为40,每步1s,利用PLOT函数绘制出机械臂末位姿,利用SUBPLOT函数绘制出四个关节在不同时间下的位置,速度与加速度的变化曲线图,如图4所示。
植物基质沙垫是江苏绿东坡环境工程有限公司生产的一种采用高密度、耐用、防腐蚀特殊性聚酯纤维和特殊工艺编织成的双层或多层编织物,现场铺设在受保护的坡面上,按顺序注入各种混合基质,使坡面受到保护,并可迅速恢复原有植被,达到自然状态。植物基质沙垫无骨料,无钢筋,水上水下整体施工,无需围堰和船舶拖排,施工简易,安全可靠,整体性强,防护性好,抗冲刷(5~6m/s),抗水压(30t/m2)、防淘蚀,适用性强,生态美观。植物基质沙垫根据各种工况要求,可设计成反滤型、无滤型、植草型、抗浪型等多种类型,可广泛应用于堤岸防护、水资源保护和水土保持工程中。
观察得到图中位移曲线平稳、光滑,证明运动过程中没有冲击与振动等运动特性,说明机械臂运动的稳定性和可靠性。
4 基于ADAMS的仿真结果
4.1 建立ADAMS模型
ADAMS可以对三维模型运动学和动力学性能进行很好的分析与仿真,但在ADAMS界面中建模相对困难,无法构建出比较复杂的几何模型
。但ADAMS中自带对外界建模软件的借口,可以将建好的三维模型通过ADAMS-VIEW进行数据的传输,然后对所建模型添加属性、运动副、运动载荷等
。
将NX中四自由度机械臂的模型另存为Parasolid格式的.x_t文件,将文件导入ADAMS中,保存为.bin格式;添加全局重力为200N,方向向下,设置每个关节的材料为carbon_fiber_11_prepreg,机械臂关节4工作载荷为10N;设置工作格栅,依次添加固定副,转动副。
4.2 添加驱动并进行仿真
机械臂有4个转动副,因此需要添加4个驱动。将MATLAB中得到的各个关节速度导出形成以时间为自变量的矩阵,导出成.txt文件,将文档中的矩阵导入ADAMS,形成的SPLINE曲线再添加到AKISPL函数的编程表达式中形成驱动。例如:motion1的仿真语句如下:AKISPL(time,0 ,SPLINE_1,0)。
设置机械臂运动的仿真时间为40s,每步为1s,进行动力学仿真。得到的运动轨迹与最终位姿与Matlab基本一致。
仿真成功后点击后处理模块POSTPROCESSOR,可以得到各个关节在X,Y,Z方向上的力矩随时间变化曲线,从而得到各个驱动峰值力矩,此峰值力矩可以作为后期机械臂的优化条件。各个关节X,Y,Z方向所需力矩如图5,6所示。
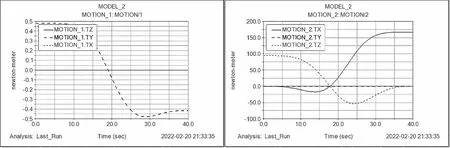
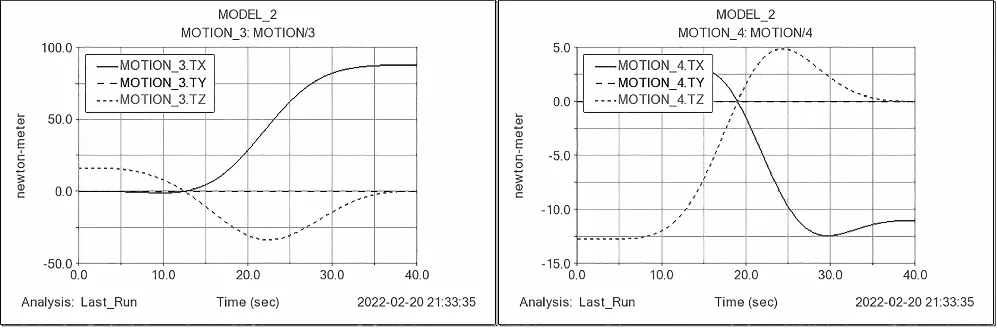
点击后处理中绘图跟踪,可以得到motion2所需力矩最大,峰值力矩值为166.98N·m;motion1所需力矩的峰值为0.48N·m;motion3峰值力矩87.75N·m,motion4峰值力矩-12.74N·m。
5 结论
本文首先调用Robotics Toolbox工具箱建立D-H坐标系;利用蒙特卡洛法研究分析机械臂的工作空间,进一步达到了获取了机械臂运动范围的目的。然后再使用五次插值多项式对机械臂的轨迹进行规划,得到的角速度曲线呈现出较为平滑的特点,从而使其可以平稳到达设计好的任务目标点。最后进一步通过ADAMS进行仿真,根据在后处理中绘制出的每个关节运动的力矩曲线能够获取运动所需求的最大力矩,并将此作为机械臂运动的边界条件,为机械臂后期的优化与结构设计进步提供依据。
[1]伍龙华,黄惠.点云驱动的计算机图形学综述[J].计算机辅助设计与图形学报2015,27(8):1341-1353.
[2]苏融. 六自由度机械臂的工作空间分析和运动学仿真[C]//第十八届沈阳科学学术年会论文集.[出版者不详],2021:648-653.DOI:10.26914/c.cnkihy.2021.009941.
[3]李宪华,孙青,范凯杰,张雷刚.双臂6R服务机器人的协作空间分析与仿真[J].机械传动,2018,42(09):130-134.DOI:10.16578/j.issn.1004.2539.2018.09.025.
[4]张玉娟. 一种新型用于搜救的连续体机器人运动学分析及仿真[D].河北工业大学,2013.
[5]王大超,刘虹.基于MATLAB与ADAMS的机械臂仿真分析[J].机械工程与自动化,2017(06):59-60+62.
[6]汪磊,毛卫平.基于ADAMS和Pro/E弯脚机械臂运动仿真分析[J].机械制造与自动化,2015,44(06):110-112.
[7]夏伟,张妍.基于SolidWorks和ADMAS的六自由度机械臂联合仿真研究[J].机械工程与自动化,2021(05):79-81.
