新能源汇集站调相机附加控制研究
2022-06-01朱建华柳方舟李湘韶刘芳芳
朱建华,李 岩,柳方舟,李湘韶,刘芳芳
(1. 润电能源科学技术有限公司,河南 郑州 450000; 2. 华润电力(温州)有限公司,浙江 温州 325810;3. 徐州华润电力有限公司,江苏 徐州 221142; 4. 华润电力焦作有限公司,河南 焦作 454001)
近年来,随着新能源开发的力度不断加大,新能源装机占比不断提升。但新能源出力不稳定,对系统电压和频率稳定都造成一定压力[1-4]。为更好满足新能源站调压需求,国内部分新能源汇集站配置了分布式调相机。文献[5]研究了包含主变高压侧电压控制的调相机对河南电网的稳定性影响,为此类调相机控制器调整提供了整定依据。文献[6]研究调相机对直流闭锁后电压稳定影响。文献[7]对直流换相失败后调相机的暂态强励策略进行研究,调相机的暂态性能提升交直流电网的暂态能力。文献[8]研究了华东电网调相机自动电压控制策略,研究结果表明,合理的控制策略提升了电网稳态电压水平。文献[9]对调相机内部的低励限制、定子电流限制等内部环节做了论述,为调相机的参数配合和策略优化提供研究依据。文献[10]论证调相机对西北地区弱送端电压的暂态电压无功支撑能力。据已有资料,青海已建成国内首个电源侧分布式调相机应用项目,为青豫直流送出新能源提供无功支撑,但关于分布式调相机的低频振荡抑制研究,还未见相关研究。
目前,基于调相机抑制振荡的问题多集中于暂态电压稳定范围,而利用调相机抑制低频振荡的研究较少。因此,本文结合调相机可调节容量大和调节速度能够满足低频振荡响应需求的特点,提出用于系统低频振荡抑制的分布式调相机附加阻尼控制策略。
1 调相机模型
1.1 调相机本体模型
单台调相机接入无穷大系统对应的数学模型如下所示:
(1)

1.2 小干扰模型
调相机正常运行时,功角δ近似等于0,可以近似认为小干扰分析时sin(δ0)=0,δ0为选定的调相机运行点对应的功角[11]。
同步发电机线性化可以直接得出海伦-菲利普斯模型,具体表达式参见文献[12]。在调相机线性化模型的主要参数K1~K6中,K2是sin(δ0)的函数,认为K2=0和K4=0。
简化后的调相机线性化模型如图1所示。
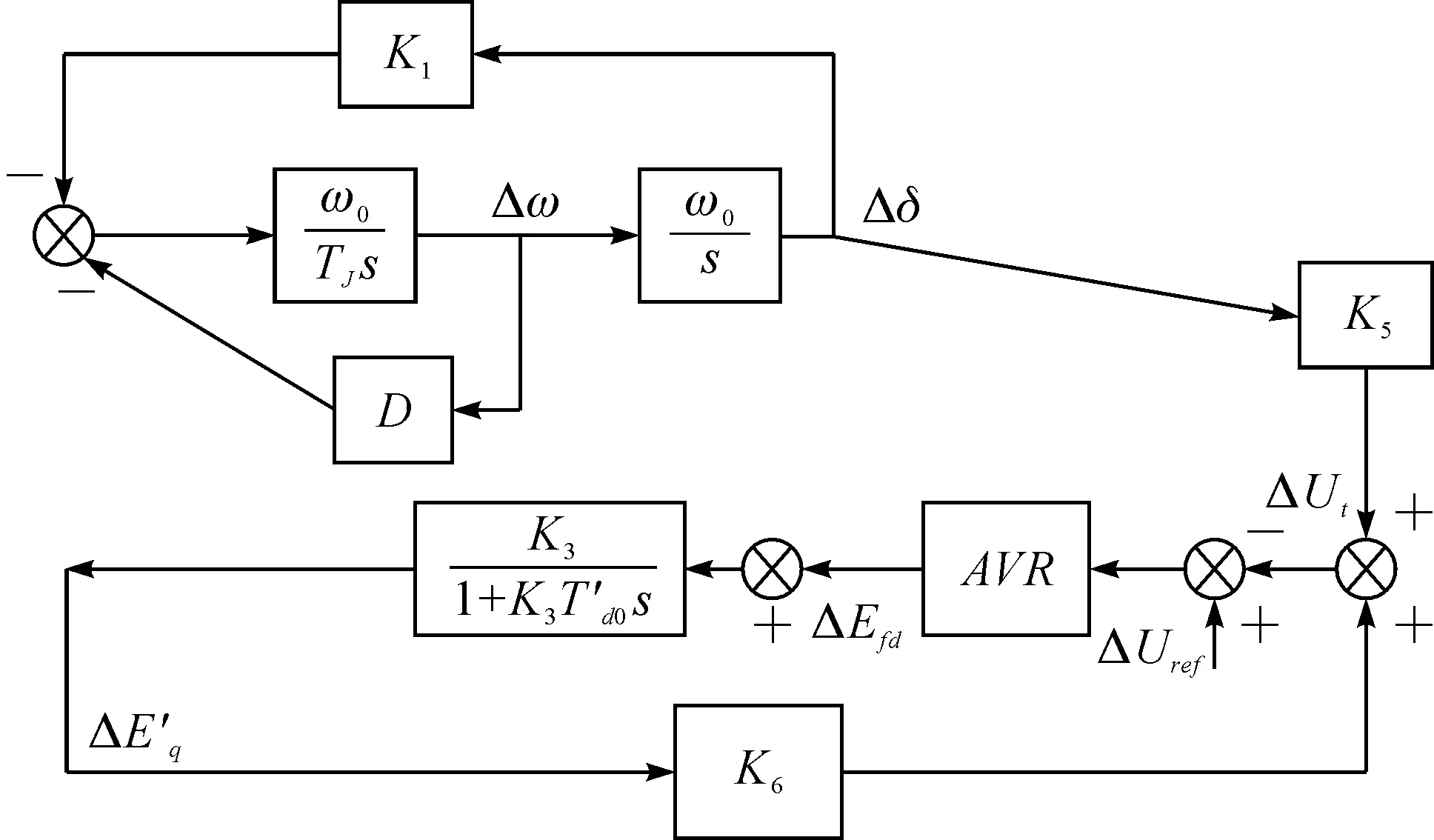
图1 调相机的线性化模型图
从图1可以看出,调相机模型可以分解为两个联系较为松散的子闭环模型。同步发电机设计阻尼控制策略时,多考虑将发电机的功角、转速、有功作为输入。但对于调相机而言,由于有功和无功基本解耦,因此不宜将调相机功角、有功作为阻尼控制的输入,需要考虑将远方控制信号或本地的电流或汇集站有功作为控制输入。
1.3 控制有效性论证
关于调相机是否给系统提供阻尼的问题存在较大分歧,文献[13]认为调相机无法提供阻尼,主要理由是同步发电机的PSS提供阻尼的主要是通过励磁绕组磁链变化提供的电磁转矩变化量产生的,而调相机中电磁转矩变化很小,所以无法提供阻尼。
本文认为文献[13]的说法是正确的,调相机无法通过改变q轴暂态电动势的变化量,而q轴暂态电动势的变化影响调相机阻尼,因此,调相机附加控制无法改变本机的阻尼特性。但调相机可以调整发电机机端电压,进而改变系统特性。
2 附加阻尼控制策略
控制器对应的结构如图2所示。

图2 附加控制的传递函数图
如图2所示,阻尼控制主要分为四个环节。首先是滤波环节,Tw=5 s,可以滤除暂态分量,避免阻尼控制器输出对调相机暂态响应构成干扰。第二部分为超前滞后环节,这里选取2阶传递函数,Td1和Td2的参数选取需要根据调整效果进行优化。Kpss为阻尼控制的比例增益,其参数大小可以影响阻尼控制的调节速度。最后为限幅环节,设置为±5%,以励磁电压额定值为基准。
附加控制参数配置需要考虑的问题主要有:
1)参数的适应性。阻尼控制需要适应电网的运行方式的变化,不宜过度强调在某种运行方式下最优补偿效果。需要综合权衡多种运行方式补偿效果。特别是对新能源送端电网时,白天和晚上潮流方向完全相反,需要重点考虑潮流方向逆转时阻尼控制的适应性。
2)与自动电压控制的协调配合。阻尼控制器前端内置有滤波环节,可以将0.2 Hz以上的高频分量隔离。但对于0.2 Hz以下的低频分量,需要根据电压调整效果进行整定和配合研究。
3)输入量选择问题。与同步机的电力系统稳定器不同,附加阻尼控制不宜选择调相机的转速、有功、功角作为输入量。根据灵敏度计算结果可以在汇集站电流、有功、母线电压频率中选择。
3 仿真验证
为验证设计控制策略的控制效果,搭建仿真模型见图3。四机系统的模型见参数参考文献[14]。
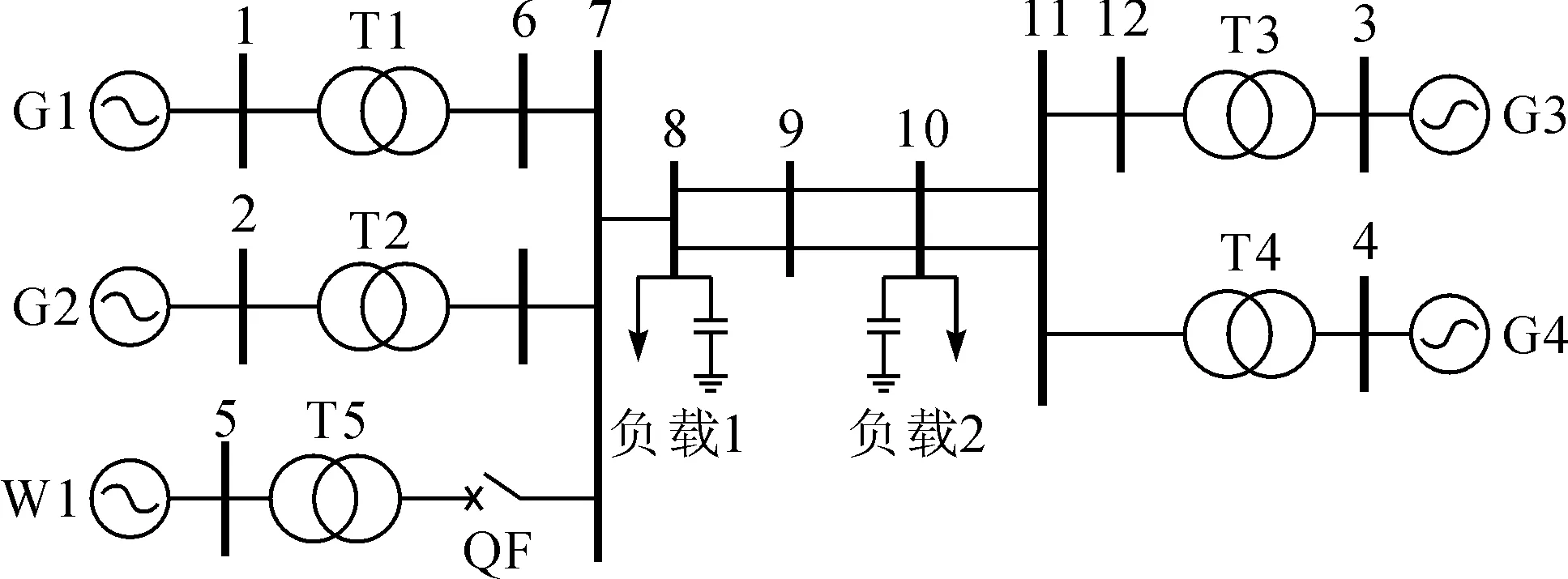
图3 四机系统示意图
3.1 不同运行方式的控制策略有效性
为验证阻尼控制器对运行方式的适应性,模拟新能源上网为典型联网发电运行方式,上网功率为141 MW左右。夜晚,模拟新能源脱网其他负荷从电网下功率的脱网用电运行方式,下网功率为45 MW左右。仿真两种运行方式下控制策略适应性,对应时域波形如图4所示。
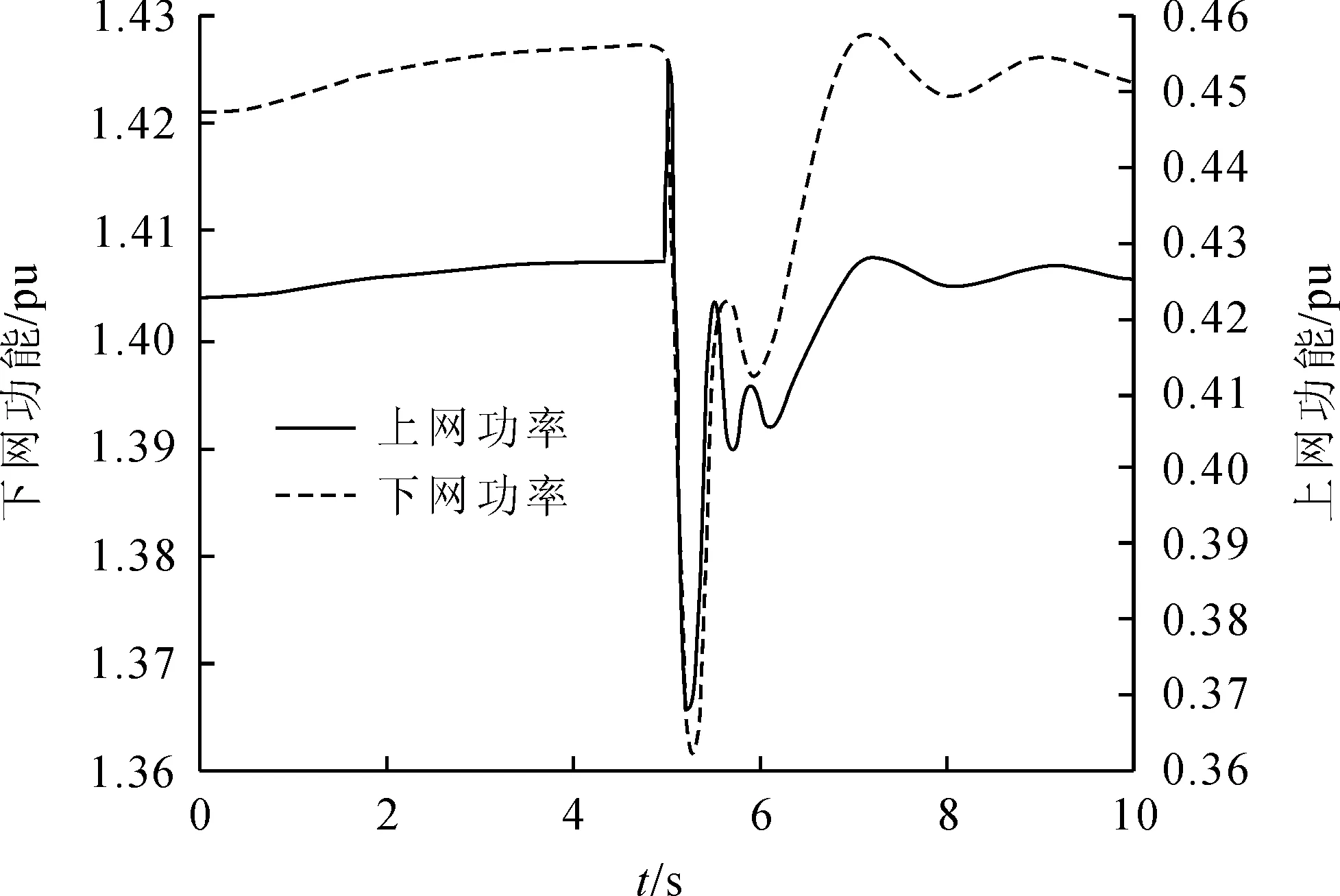
图4 不同运行方式新能源电站出线电流对比图
从图4可以看出,两种运行方式下控制策略取得较好控制效果。在下网运行方式下,正向和反向功率振荡均存在,恢复时间在2 s左右。在联网发电方式下,负向功率振荡较大,恢复时间与脱网用电运行方式一致,也在2 s左右。从图4可以看出,在不同运行方式,阻尼控制均取得较好效果,说明所提控制策略具有一定的适应性。
3.2 不同输入变量的控制策略有效性
为验证不同输入变量对控制策略有效性的影响,在5s时刻设置1号机机端电压发生5%阶跃电压激励,在系统产生一定功率振荡。仿真三种控制策略时域响应,对应时域波形如图5所示。
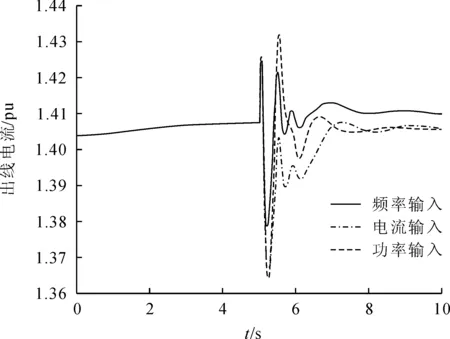
图5 下网功率下三种控制方式下电流对比图
从图5可以看出,三种控制策略在抑制有功波动上均取得较好效果。采用频率输入的控制策略,电流波动抑制效果最好,后期电流恢复稳态时间最长。电流输入控制策略超调相对较大,恢复稳态时间较短。功率输入超调最大,后期恢复时间与电流输入控制策略类似,均短于频率输入的控制策略。
3.3 控制阻尼控制对原有区间模式的影响
为验证阻尼控制器对区间振荡模式的影响,选择时域分析法,对比传输线曲线实现模态对比的目的。仿真两种运行方式下区间振荡模式变化趋势,对应数据如图6所示。

图6 不同运行方式下传输线功率对比图
从图6可以看出,三种运行方式下传输线功率有所差异,主要原因新能源电站的加入导致系统潮流变化,进而导致传输线电流变化。但对比三种方式下传输功率,振荡周期基本一致,阻尼也基本一致,说明调相机附加阻尼加入对区间振荡模式影响很有限,主要原因是调相机容量有限,仅有50 MVar。而4台主力机组容量均为900 MVar,调相机容量仅占系统机组容量的1.39%。
4 结 语
1)研究了新能源汇集站的调相机电力系统低频振荡和阻尼特性,推导出调相机小干扰传递函数,并通过时域仿真验证了小干扰模型和控制策略的有效性。
2)在联网发电和脱网用电运行方式下,控制策略均能够适应潮流方向变化,为系统低频振荡提供正阻尼,对实际电网的潮流变化具有一定的适应性。
3)对比三种不同控制输入的控制策略,不同输入的控制策略均取得较好的控制效果。相对而言,电流输入的控制动态效果最好,其他两种控制策略恢复稳态效果稍差。
