基于改进光流法的锅炉火焰动态特征提取与分析
2022-06-01杨国田何雨晨李新利
杨国田, 何雨晨, 李 鑫, 李新利
(华北电力大学 控制与计算机工程学院,北京 102206)
0 引 言
火焰可视化与表征技术已经广泛应用于现代工业锅炉燃烧过程监控中[1,2]。利用图像获取技术,捕捉锅炉燃烧过程在空间、时间上的有效特征信息,有助于分析锅炉火焰燃烧状态,定性、定量的描述燃烧过程,同时为后续针对燃烧监测和控制研究提供可靠的理论方法。基于图像分割算法提取的火焰特征,主要包括:火焰几何参数[3,4]、发光参数[5-7]、火焰振荡特性[8,9]、火焰纹理特征[10,11]等。上述火焰特征多提取于火焰单帧图像,忽略了火焰的连续动态信息。炉内火焰具有随机性和流动性,易于出现剧烈变化,单帧图像很难反映这类火焰动态特征,造成炉内燃烧状态识别有误。目前基于视频监测锅炉火焰运动轨迹,提取相应的动态特征,用于分析和研究炉内燃烧过程尚处于初级阶段。
光流法(Optical Flow, OF)是目前视频运动分析的一种重要手段,已被广泛用于视觉动态检测任务,包括跟踪[12],分段[13],动作识别[14]等。它能估算视频图像上每个像素的速度向量,快速确定物体运动轨迹,提取复杂背景下物体运动变化[15]。锅炉火焰视频携带着多种火焰动态特征信息,光流法能提取图像连续帧间火焰的运动轨迹,分析不同燃烧工况下的动态特性。传统光流法对视频图像、应用程序的外在硬件设施要求较高,其时效性和经济性限制了其在燃烧过程监控中的工业应用。
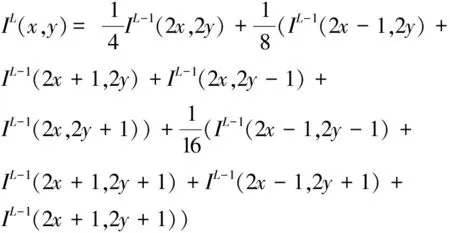
本文提出一种基于金字塔分层改进的Lucas-Kanade(简称L-K)光流检测算法,其核心思想是将大尺度运动转化为小尺度运动,进而捕捉火焰运动轨迹。同时,能够提高算法的运行速度,使其可在常规台式电脑上运行,实现对普通工业摄像机拍摄的火焰视频的处理,以实时获取火焰动态特征。此外,基于所提取的炉内火焰动态特征,分析不同工况下火焰动态特征的实时变化规律,从火焰监测角度出发,验证所提取动态特征的有效性与灵敏性,利用互信息法分析火焰光流动态特征与负荷、NOx排放量之间的相关性,为锅炉燃烧过程实时监测提供一个更快速有效的特征参数。
1 基于金字塔改进的L-K光流法
1.1 标准光流法
光流法是利用视场质点与摄像头的相对位移来描述目标连续序列图像的瞬时运动,是一种对目标真实运动的近似估算。光流法最早由Horn Schunck[16]提出,利用连续帧图像对应点位置的变化,计算其位移,获取单个像素点的运动速度矢量。
I(x,y,t)为t时刻图像上像素点(x,y)的亮度,根据亮度恒定守则可知,假设I(x,y,t)不变,且点(x,y)的运动轨迹随时间变化足够小,即
I(x,y,t)=I(x+dx,y+dy,t+dt)
(1)
式中:dx和dy分别为像素点在x轴和y轴方向上的位移,dt为像素点(x,y)到达新的像素位置(x+dx,y+dy)的时间。
利用泰勒公式展开式(1)有
式中:ξ是关于dx,dy和dt的二阶及二阶以上项。当位移足够小时,ξ可以忽略。
消除式(2)两边的I(x,y,t),除以dt有
(3)
令u,v分别为光流沿着x轴和y轴的速度矢量,即
(4)
令:
(5)
由式(4)和式(5)可得,式(3)可表示为在空间和时间上点(x,y)梯度与速度分量之间的关系:
Ixu+Iyv+It=0
(6)
根据图像信息计算可得Ix,Iy和It,带入式(6)即可求解u和v,得到光流在x轴和y轴方向上的速度。
1.2 基于金字塔分层改进的L-K光流法
L-K光流法是Bruce D. Lucas与Kanade在标准光流法的基础上,提出的一种基于两帧差分稀疏光流估算方法。该方法抗噪性强,能快速、准确计算像素点的运动轨迹[17]。
假设I和J是前后两帧相邻二维灰度图像,对于图像上每个像素点的灰度值定义为式(7):
I(X)=I(x,y),J(X)=J(x,y)
(7)
其中X=(x,y)是图像上像素点的坐标。
像素点α为图像I上的像素点,其位置坐标为α=(αx,αy),β为图像J上的匹配像素点,其位置坐标为β=(αx+dx,αy+dy),根据亮度恒定守则,点α和点β间的灰度值差距最小,即
I(α)≈J(β)
(8)
设点α的光流速度向量为d=(dx,dy),取任意整数ωx、ωy,求解光流速度向量d,则向量d必须满足残差函数ε最小:
minε(d)=ε(dx,dy)
(9)
ωx和ωy的取值范围通常为2≤ωx,ωy≤7。
求解L-K光流法的前提条件为像素点运动的位移足够小。由于锅炉燃烧过程复杂,当工况出现变化时,火焰短时间内速度剧烈波动,导致其运动位移过大。同时,受视频采集速度限制,标准光流法的基本假设不成立,所提取的光流速度会出现巨大偏差,无法跟踪火焰运动轨迹。
Bouguet[18]提出的金字塔分层算法可以将图像中的大位移运动转化为小位移运动,用于求解L-K光流,能够解决燃烧监测中火焰运动难以捕捉的问题。针对运动速度过快的情况,通过分层采样压缩,将原图像中较大的运动转化为足够小的运动,以保证满足光流的运动尺度要求。

(10)
假设I0是第0层图像,即I0为金字塔中的原始图像,其分辨率最高。在金字塔模型中,通过递归计算金字塔各层图像信息,即I1图像信息由I0计算得到,I2由I1计算得到,计算过程如式(11)所示:

第L层像素点αL对应的速度向量dL满足第L层图像残差函数最小,即
(12)

通过对式(12)求导,近似求解dL:
(13)

(14)
(15)
像素点的速度向量di=(dxi,dyi)的速度大小di与运动角度θi为
(16)
(17)
2 基于改进光流法的火焰动态特征提取与相关性分析
2.1 现场装置与锅炉数据
本文是以河南某大型火电厂660 MW超超临界锅炉为研究对象。如图1所示,锅炉采用对冲燃烧技术,其燃烧器布置在锅炉前壁和后壁,分为上、中、下三层,每层包含六个旋流燃烧器,各层对应一台中速磨煤机。火焰图像视频来源于安装在燃烧器上方的工业视频采集摄像头,该摄像头安装在每层燃烧器的第1个和第4个上方0.5 m处,摄像头与燃烧器出口平行,沿着燃烧器轴向方向捕捉其出口处的火焰视频。外设高温保护套管,利用锅炉二次风对摄像头循环降温,保证视频采集装置在炉内高温环境下稳定运行。

图1 火焰视频采集示意图Fig. 1 Diagram of flame video capture
通过锅炉DCS系统采集机组实时负荷数据与NOx排放量数据。由于采集获得的机组负荷数据与NOx排放量存在部分数据异常与空点,本文通过Python中的Pandas模块选出异常点与空白点,并利用平均值插值法进行修正,其数据修正如图2所示。

图2 数据修正示意图Fig. 2 Diagram of data correction
2.2 基于金字塔改进光流法的火焰动态特征提取
(1)利用安装在燃烧器出口处的视频采集装置,收集不同工况下炉内燃烧器出口火焰视频图像,建立特征提取所需的视频图像数据库,并对视频进行转码,其输出格式为MP4格式视频。
(2)工业视频摄像机采集的视频图像大小为480×720像素,采集频率为24 Hz。首先对视频图像进行预处理,采用中值滤波消除部分图像自带的噪声,再对其进行灰度化处理,提升图像质量,便于精确提取火焰动态特征。
(3)如图3所示,采用金字塔改进光流法,提取火焰图像中像素运动信息,描述火焰运动情况。
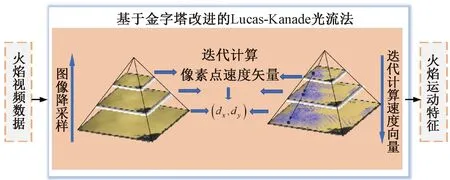
图3 改进后L-K光流法跟踪示意Fig. 3 Schematic of improved L-K optical flow
2.3 基于信息熵的互信息相关性分析
互信息可以挖掘变量之间的非线性相关性,相比于传统的Pearson相关性分析等线性相关性分析方法,可以更有效分析异常复杂的锅炉系统参数与火焰图像提取的动态特征之间的相关性[19,20]。
对于两个离散随机变量X与Y,设p(x,y)是X与Y的联合概率分布函数,p(x)与p(y)为其各自的边缘概率分布函数,因此变量X与Y的互信息表达式为
(18)
计算式(18)即可得到相应的相关系数,其与变量之间的相关性强弱关系如表1所示。
表1 相关性与相关性系数Tab.1 Correlation and correlation coefficients
3 实验结果与分析
3.1 变工况下火焰动态特征提取实验结果与分析
实验选取锅炉包含升负荷、降负荷和稳定负荷三种运行工况下的火焰视频图像。不同工况下实际火焰视频图像如图4所示,其具体工况参数如表2所示。

图4 实际火焰图像Fig. 4 Actual flame images
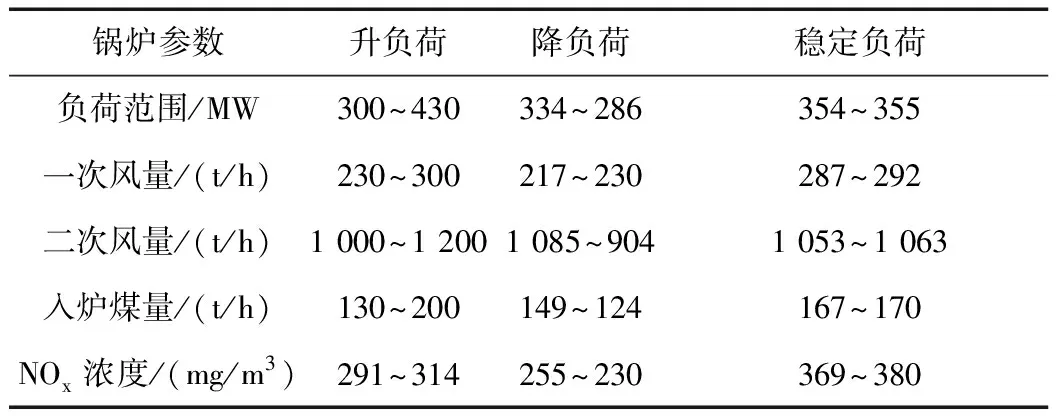
表2 不同运行工况参数Tab.2 Parameters for different operation conditions
三种工况各搜集28 000帧火焰连续图像,利用改进后光流法提取火焰图像动态特征。图5为改进后光流法提取的火焰光流运动矢量图。
如图5所示,在变工况下炉内燃烧火焰频繁变动,图像上各像素点的速度大小和方向都存在很大的差别。每组图像中单个像素点的速度大小与方向无法用线性方法准确表达,同时,操作人员也很难从海量光流图像数据中找到相应的火焰动态特征。
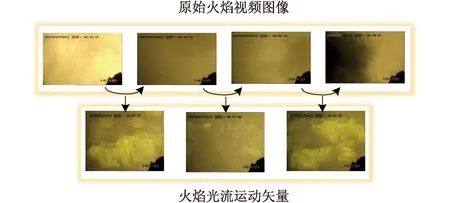
图5 火焰动态特征矢量图Fig. 5 Diagram of flame dynamic feature vector
由于图像数据庞大,单工况选取了28 000帧的火焰图像,对于尺寸为480×720的火焰图像而言,描述每个像素的速度大小和方向,其数据量会成几何倍数增长。尤其是对于每秒24帧的长时间火焰监测视频来说,一旦进行更长时间尺度的特征提取,数据量会达到难以估量的级别。因此,本文选择单帧火焰图像上所有像素点光流矢量的速度大小的均值an与方差bn,以及速度方向的均值cn与方差dn,四个特征描述一帧火焰图像的动态特征。
(19)
(20)
(21)
(22)
式中:n为像素点个数。
如图6所示,降负荷工况下,速度大小与方向的方差与均值。
如图7所示,升负荷工况下,速度大小与方向的方差与均值。

图6 降负荷工况的火焰动态特征Fig. 6 Flame dynamic characteristics in reduction load conditions

图7 升负荷工况的火焰动态特征Fig. 7 Flame dynamic characteristics in lift load conditions
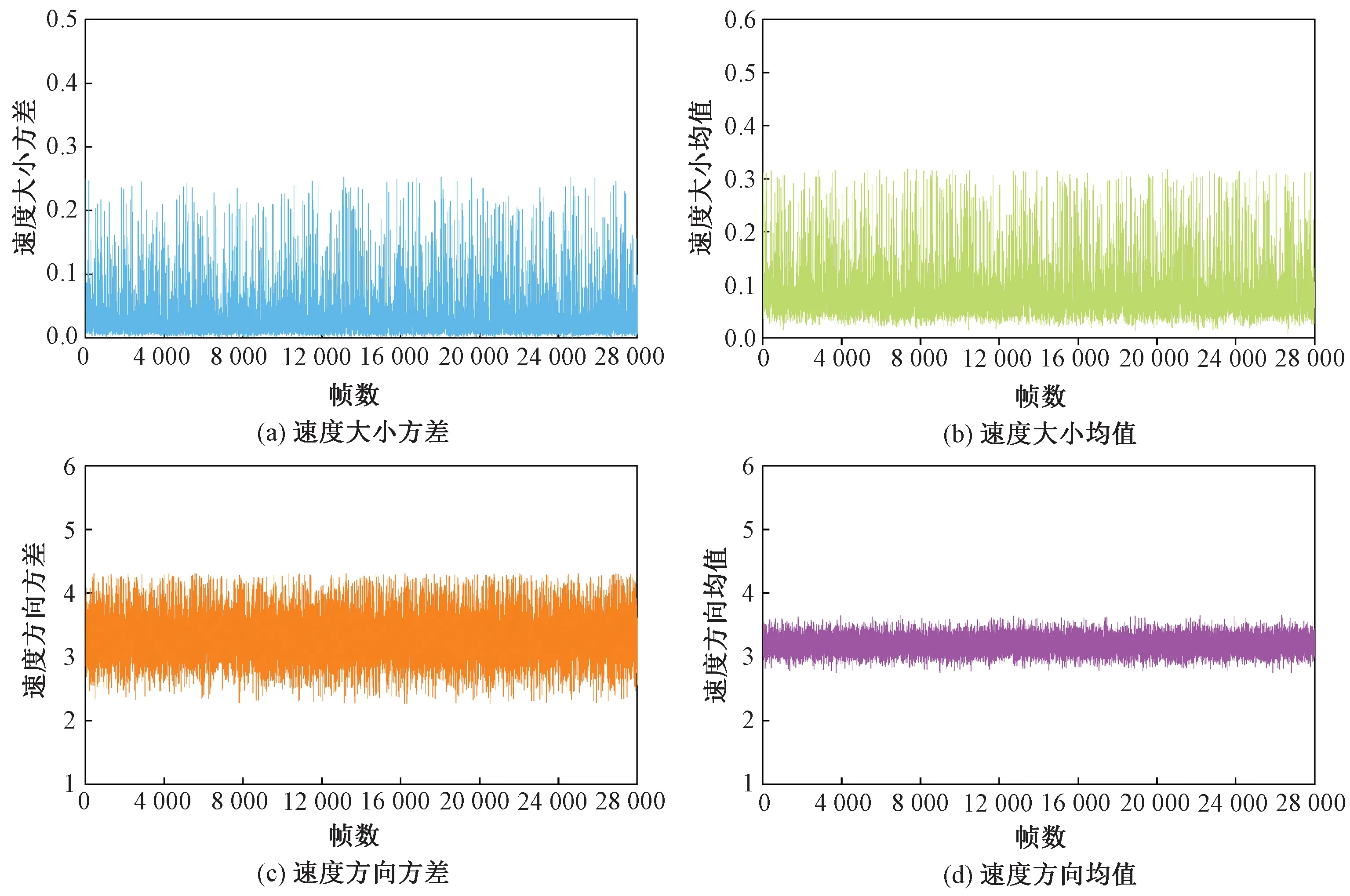
图8 稳定负荷工况的火焰动态特征Fig. 8 Flame dynamic characteristics in stabilize load conditions
如图8所示,稳定负荷工况下,速度大小与方向的方差与均值。
如图6 ~ 图8所示,在锅炉处于变工况下,受入炉煤粉流速度和二次风波动的影响,无法保证炉内燃烧稳定,火焰动态特征变化明显。在降负荷过程中,由于入炉煤粉流速降低,炉内温度骤降,受气流变化影响,炉内燃烧不能处于稳定状态,其火焰速度大小的均值与方差明显较高。升负荷时,由于锅炉处于中高负荷下运行,炉内温度较高,煤粉能迅速达到着火点,燃烧器出口处燃烧较为稳定,因此,火焰速度大小的均值与方差也相对较低。
同时,受燃烧器喷粉方向的影响,火焰速度方向的均值和方差均集中在特定值附近,其火焰运动方向变化不大。由于降负荷过程中,炉内燃烧处于不稳定状态,相较于升负荷工况下,其火焰速度方向均值与方差都更为分散,火焰运动波动明显。升负荷时,炉内燃烧更为稳定,其速度方向的均值与方差更为集中。
由于本文选取的稳定负荷工况火焰视频是在升负荷工况后一段时间,受锅炉惯性影响,一次风煤气流仍然在增加,与炉内烟气发生剧烈混合,炉内火焰速度增加,所以火焰整体速度大小的均值和方差都相对较大,气流的波动使得火焰速度方向的均值和方差更为分散。
3.2 相关性分析
为了验证所提取火焰动态特征的有效性,本文采用互信息法分析火焰动态特征与相关参数(负荷与NOx排放量)之间的相关性。同时,为了验证改进后光流法提取的火焰动态特征的质量,比对传统光流法提取火焰动态特征与机组相关参数之间的相关系数,其结果如表3 ~ 表6所示。在不同运行工况下,改进后光流法提取的特征与机组负荷、NOx排放量相关性更高,对工况变化更敏感,所提动态特征能更好的跟踪火焰随工况变化的运动轨迹。
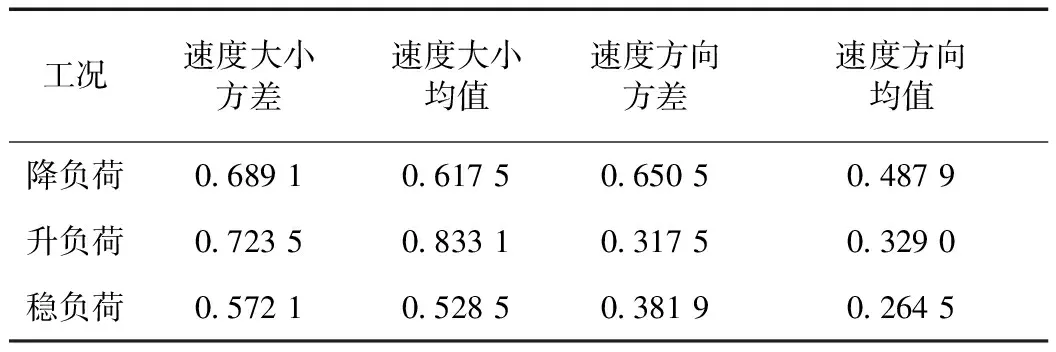
表3 传统光流法提取的动态特征与负荷的相关性
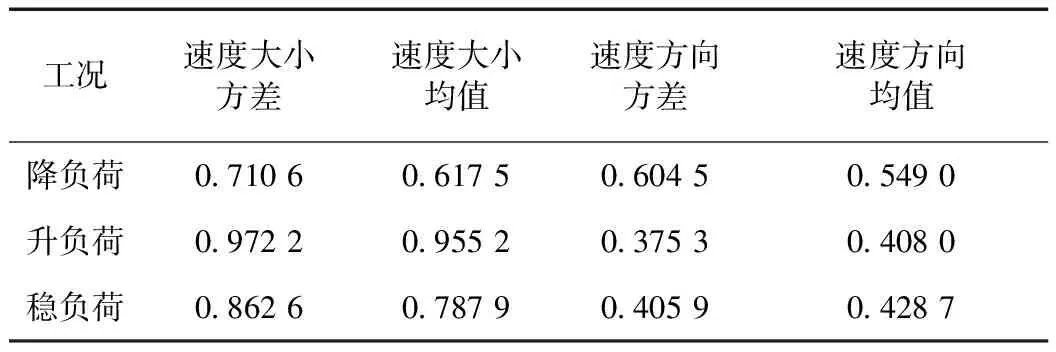
表4 改进后光流法提取的动态特征与负荷的相关性
由表3和表4可知,速度大小方差与均值两个参数在三种工况下,与机组负荷的相关系数都较高,达到了0.57以上,具有显著相关性。速度方向的方差在降负荷的时候与机组负荷相关性较高达到了0.54以上,而在升负荷与稳定负荷的时候,相关性相对较小。结合图4可知,在升负荷与稳定负荷时,图像中均出现了喷煤粉的现象,由于煤粉方向的波动性,干扰了光流法对火焰动态特征的捕捉。而在降负荷中,由于较少的煤粉干扰,所以速度方向的方差与均值,都有较高的相关性表现。
由表5和表6可知,变工况下,火焰速度大小的均值和方差与机组NOx排放的相关系数都较高,具有显著相关性。速度方向的方差在降负荷时与机组负荷具有达到或者接近显著的相关性,而在升负荷与稳定负荷的时候,相关性相对较小,但均已达到中等相关程度以上。改进后光流法提取的火焰动态特征能有效的描述与分析燃烧过程随工况调整的变化,同时动态特征的分布也能反映当前炉内燃烧状态,进而实现实时、准确监测锅炉燃烧过程。

表5 传统光流法提取的动态特征与NOx的相关性

表6 改进后光流法提取的动态特征与NOx的相关性
4 结 论
本文针对锅炉燃烧过程中,火焰运动轨迹无法实时跟踪等问题,提出了基于金字塔分层改进的L-K光流法,用于提取炉内火焰动态特征。通过分析变工况下火焰动态特征随锅炉负荷的变化,证明了所提火焰动态特征能有效反映当前工况、燃烧状态的变动。为了进一步验证动态特征的有效性与灵敏性,加入互信息法分析火焰动态特征与负荷、NOx排放量之间的相关性。通过与传统光流法提取的动态特征进行比较,改进后光流法所提取的火焰动态特征质量更高,与相关参数之间的相关性更强,有更大的潜力用于炉内燃烧过程在线监测与调整。