基于扩张状态观测器的卫星通信跟踪控制系统设计
2022-06-01方锦钰袁红伟安学广
方锦钰,袁红伟,安学广
(中国人民解放军63618部队,新疆 库尔勒 841000)
0 引言
随着通信质量越来越高,为了提供更优质、快速的通信服务,通过架设通信基站、建设通信系统,解决了部分的移动通信问题。我国地域辽阔,尤其是地理条件相对偏远的地区,通信效果更差,在抗震救灾中等特殊情况下,仅依靠地面通信系统是远远不够的。卫星移动通信的覆盖能力更广,通信过程中不会受到外界干扰,应用在以上特殊条件的环境下,卫星能够通过一定的通信方式与地面进行连接,将采集、探测到的信息通过传输信号发送到地面通信系统中,进行信息交互。在信息交互过程中,为了保证卫星通信的稳定性,地面通信系统需要获取卫星实时状态信息,由于卫星种类较多、所在轨道位置不同,其姿态信息、轨道信息等变化也相对较大,导致卫星跟踪精度较低,为了提升卫星跟踪精度,需要建立卫星通信跟踪控制系统来对其进行跟踪控制。
当前已有相关学者对卫星通信跟踪控制系统设计做出了研究。文献[3]提出基于参数化设计的卫星通信跟踪控制系统,对精、粗两级子系统进行整体设计,最大限度地利用系统自由度,实现了阶跃干扰解耦、抑制了复杂干扰、从而提高跟踪控制精准度,但该系统的运行效率较差;文献[4]提出基于DSP控制器的卫星通信系统稳定性控制系统,给出了系统电机控制原理以及电源电路的设计,通过DSP控制器消除船舶卫星通信系统的噪声信号和误差,为舰船的通信及定位提供保障。该系统虽然针对硬件优化设计,但系统运行效率差。
文献[5]提出基于精密卫星跟踪和测距应用的卫星系统运动控制系统。为了克服由于系统动力学和位置相关设备变化引起的性能限制,该系统使用直驱永磁同步电机 (PMSM) 进行高精度定位。该系统对于小扰动状态的运动控制精度较好,但对于大扰动状态的控制精度较差。文献[6]提出用于人造卫星姿态控制的参数化模型预测控制(MPC)。所提出的控制方案的主要特征包括在每个采样时刻获得最佳解决方案,尊重结构卫星操作约束,确保稳定性、跟踪性能和操作可靠性。该系统运行效率较好,但控制精度有待提升。
为了解决以上问题,本文设计了基于扩张状态观测器的卫星通信跟踪控制系统。扩张状态观测器作为一种不依赖于系统数学模型的观测器,由于算法简单很容易应用在实际工程中。
本文首先设计控制模块、传感器模块、电源模块与电机驱动模块,组成卫星通信跟踪控制系统的硬件。引入扩张状态观测器,计算天线经纬度,比较误差,根据计算出的卫星相对于天线的俯仰角对卫星通信信号进行跟踪控制。
1 基于扩张状态观测器的卫星通信跟踪控制系统硬件设计
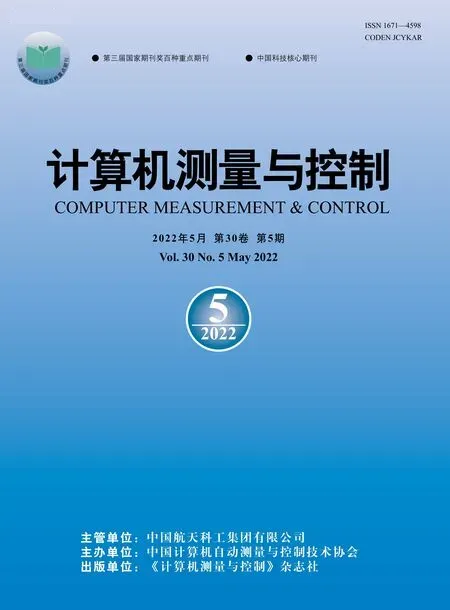
基于扩张状态观测器的卫星通信跟踪控制系统硬件结构如图1所示。
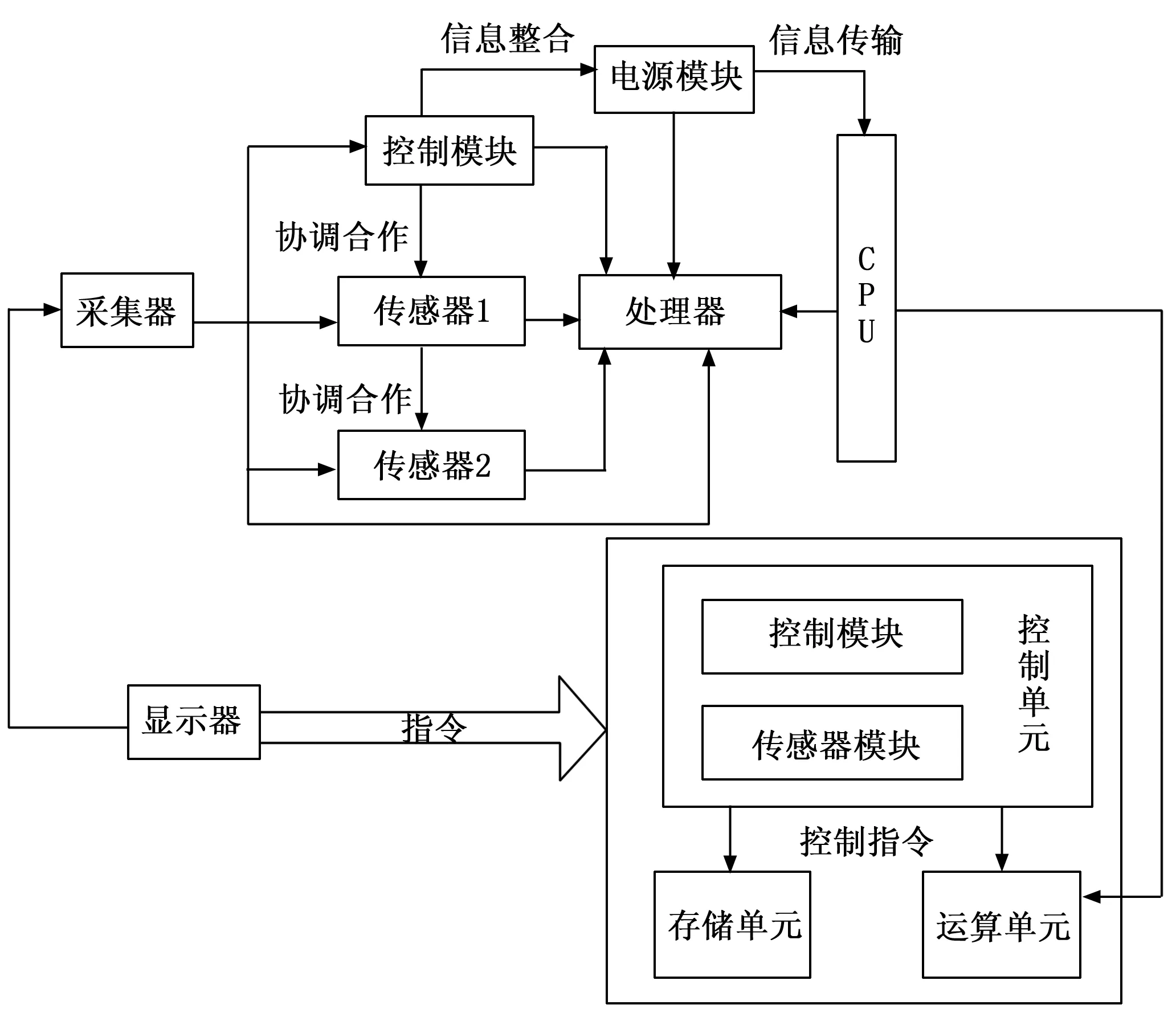
图1 卫星通信跟踪控制系统硬件结构
1.1 控制模块设计
控制系统的控制模块主要对卫星通信数据、卫星姿态信息等进行控制。控制模块的核心芯片选用三星公司生产的SXD320F2784,该控制芯片具有较快的数据处理速率,可对卫星探测的信息数据进行快速处理,处理主频最高能达到200 MHz,最多可存储258 Mb的卫星通信数据,同时,该款控制芯片具有较多外设,例如:SPI、ADC、UAB等,为了更好的控制系统的传感器模块与电机驱动模块,设置了大量的控制接口。
控制芯片结构如图2所示。
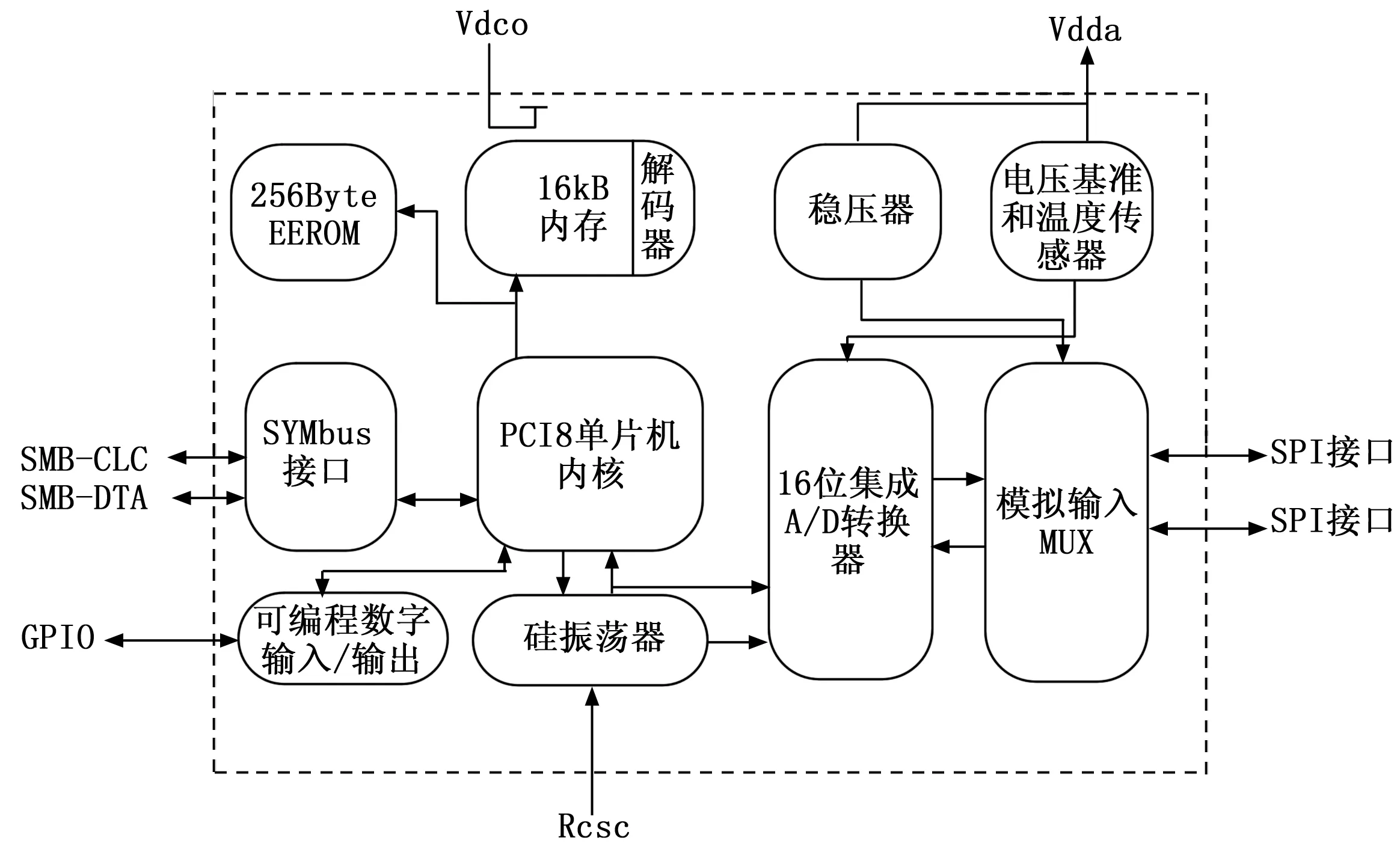
图2 控制芯片结构
观察图2可知,在模块内的时钟电路内,传输时钟信号与卫星通信信号,以低功耗的方式通过SPI接口发送到控制芯片上,经过控制芯片的处理后通过存储器接口发送到SRAM Flash上进行存储,存储完成后,卫星通信信号与通信数据控制完成,可进行下一组通信数据的控制。
1.2 电源模块设计
电源模块主要负责提供电源,确保电路可以稳定、正常工作,可将18 V输入电压转化为8 V、4.8 V、3.3 V,其中,8 V电压给系统的传感器模块,3.3 V电压给控制模块,4.8 V给电机驱动模块。电源模块的输入电压是12 V,需要采用转换芯片将18 V电压转换成每个模块所需的电压。其中8 V电源需要电压稳定,输出较小的波纹,8 V电源转换芯片选用TD公司生产的TDG3320,电源芯片从固定电压转换成可调电压,输出的电流更多,其压差不超过1.8 V,可随着电流的增大而增大。
电源模块电路中,4.8 V电源转换芯片选用三星公司生产的LM7362,该款电源芯片是一种三端线性稳压芯片,在应用上较为普遍,可输出较小的波纹,带载能力较好,可提供最高1 A的输出电流,具有较高的负载调整能力。3.3 V电源转换芯片具有较低的功耗与较低的静态电流,不会随着负载的增加而发生变化,可对电路进行有效的保护。通过对电源模块的设计,可实现卫星通信跟踪控制系统的正常运行。
1.3 传感器模块设计
传感器模块包括AHRS轴向传感器、GPS、信标机。传感器模块结构如图3所示。

图3 传感器模块结构
由图3可知,轴向传感器可反映卫星的姿态,GPS负责进行定位,信标机可采集卫星信号并测量信号强度,轴向传感器与GPS中采集的卫星通信数据通过串行通信接口进行传输,在传感器信号采集电路中增设了两个串行通信接口,分别与轴向传感器与GPS的信号线连接,轴向传感器与GPS中的卫星通信数据经过电平转换后,通过采用扩张状态观测器对数据中的卫星姿态信息进行扩张处理,传感器模块的输入电压为8 V,其中信号采集电路的电压为4.8 V,电平转换电路的电压为3.2 V,信号采集电路中含有驱动器与接收器,驱动器中的逻辑电平将卫星姿态信息转换成传感器姿态信号,通过电路中的SDI接口传输到接收器中,接收器接收到传感器姿态信号后,通过EIA-232电平进行转换并输出。电平转换电路主要将信标机采集的卫星信号进行A/D转换,AD引脚输入的电压为1.2 V,信标机输出的电压为1.8 V。
1.4 电机驱动模块设计
电机驱动模块主要负责卫星天线的快速对星。电机驱动模块的核心芯片选用SGS公司生产的L845N,具有较高的电压与电流,工作电压最高可达到56 V,电流最高可达到4 A,瞬时电流可达6 A,额定功率为12 W,该款驱动芯片通过逻辑电平对卫星天线信号进行控制,具有逻辑输入端与控制使能端,可在低电阻下检测电压。
芯片能够驱动多个直流电机,引脚OUT1,OUT2与电机的输出端口进行连接,INPUT1,INPUT2控制逻辑电平。直流电机在进行卫星天线的对星时,将卫星天线信号通过引脚OUT1从电机中输出,再经过ENB使能端的控制,控制完成后经过INPUT1输入到逻辑电平中,再通过驱动芯片进行驱动,卫星天线的对星操作即完成。
2 基于扩张状态观测器的卫星通信跟踪控制系统软件设计
在上述卫星通信跟踪控制系统硬件设计的基础上,基于扩张状态观测器对卫星通信跟踪控制系统软件进行设计。在扩张状态观测器基础理论的基础上,通过传感器采集卫星通信数据,应用扩张状态观测器预估天线经度纬度值,并通过计算得出准确的经度纬度值,进一步计算出得出卫星相对于天线的俯仰角,对卫星通信信号进行跟踪控制。
2.1 扩张状态观测器的理论基础
干扰观测的设计具体如下:
当未知的外部干扰k
能够满足以下假设时:对于系统的未知时变干扰k
=[k
,k
,k
],有常数向量J
并且满足干扰观测:
(1)
其中:a
为外部干扰参数集合;n
为正整数。采用干扰观测器的干扰估计值定义如下:

(2)
其中:Δ
到Δ
是指未知的外部干扰d
与其各阶导数的对应估计值。2.2 基于扩张状态观测器的卫星通信跟踪控制实现
基于扩张状态观测器的卫星通信跟踪控制系统的软件流程如图4所示。
图4 基于扩张状态观测器卫星通信跟踪控制系统流程
首先,对系统进行初始化。将系统中的控制程序、传感器进行初始化,初始化操作后控制程序的时钟源频率为30 MHz,将控制程序中芯片的数据处理主频设置成最大值,即200 MHz,对GPS传感器中的卫星通信数据进行处理,使程序CPU的时钟频率达到180 MHz,并调整好外设时钟的比例。进行直流电动机的停机初始化。在中断初始化过程中,需要对卫星天线和使能端的中断服务程序进行设置,进行全局中断与实时中断,使用级联模式对卫星通信信号进行顺序采样,通过AD转换电平进行转换。
然后,根据系统初始化结果对卫星天线进行初始对星。卫星天线初始对星包括卫星粗对准,在进行卫星粗对准时,需要确定天线的大概位置,可通过采用扩展状态观测器计算天线的经纬度,从而计算卫星相对于天线的角度,扩张状态观测器预估天线经度值的计算公式为:

(3)
其中:b
是姿态控制系统中不确定量和外界干扰的符合量,为数量矩阵。通过天线经度估计值得出天线经度D
的计算公式为:
(4)
式中,γ
表示天线与卫星的经度差;α
表示电机横滚角;根据计算出的天线经度值,再利用扩张状态观测器计算天线的纬度B
,其计算公式为:
(5)
式中,φ
表示天线方位角;v
表示地心与卫星的距离;r
表示扩张状态观测器参数。根据计算出的天线经纬度获得卫星相对于天线的俯仰角β
为:
(6)
对于卫星的俯仰角进行计算,对比估计值,如果误差较大,需要利用直流电机在方位轴上进行驱动并扫描。
最后,根据计算出的卫星相对于天线的俯仰角对卫星通信信号进行跟踪控制。卫星相对于天线的俯仰角计算出后,对卫星自身的姿态信息进行识别,如果出现信号扰动情况,可根据GPS中卫星所在轨道位置数据计算天线的角速度,并得到卫星跟踪信号,根据卫星跟踪信号的扰动情况驱动直流电机,使天线转动,对卫星通信信号进行实时跟踪控制。
3 实验研究
为了验证本文设计的基于扩张状态观测器的卫星通信跟踪控制系统的有效性,选用本文提出的通信系统和文献[3]系统)、文献[4]系统进行实验对比。实验以MATLAB软件作为仿真平台,在RarePlanes数据集中选取500 MB卫星通信数据作为实验对象,进行卫星通信跟踪控制系统的有效性测试。为保证实验结果的有效性,本文分别从大扰动情形和小扰动情形进行实验。
3.1 大扰动情形
在大扰动情形下,选取单位阶跃信号进行动态响应,斜坡信号为1,产生的高斯白噪声方差为1×10,得到的动态响应和稳态响应实验结果如图5所示。
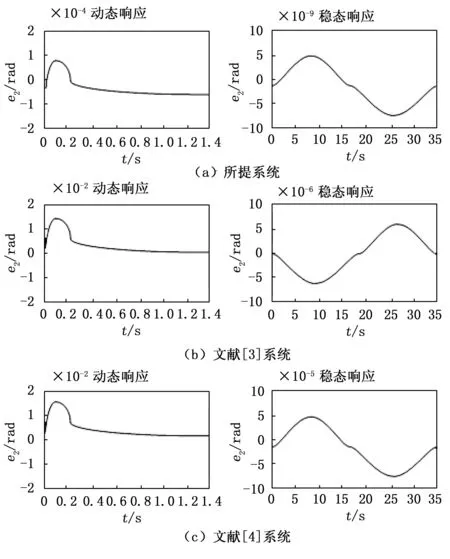
图5 大扰动情形下控制精度实验结果
根据图5可知,本文提出的控制系统对于卫星通信的控制精度要高于文献对比系统。图7结果表明,在动态响应过程中,基于扩张状态观测器的卫星通信跟踪控制系统对于角度的控制能力可以达到10rad级别,文献[3]系统的控制能力仅能达到10rad级别,文献[4]系统的跟踪控制精度为10rad级别。在稳态响应过程中,基于扩张状态观测器的卫星通信跟踪控制系统对于角度的控制能力可以达到10rad级别,文献[3]系统的控制能力仅能达到10rad级别,文献[4]系统的跟踪控制精度为10rad级别。本文提出的控制系统控制过程十分平稳,由此可见,在大扰动情形下,本文提出的控制系统控制精度要远远高于文献对比系统控制精度。
3.2 小扰动情形
在实际工程中,小扰动情形相对较多,相比较于大扰动情形,小扰动情形受到的干扰量更小。选取单位阶跃信号进行动态响应,斜坡信号为0.017,产生的高斯白噪声方差为1×10,得到的动态响应和稳态响应实验结果如图6所示。

图6 小扰动情形下控制精度实验结果
根据图6可知,在小扰动情形下,本文提出的控制系统对于卫星通信的控制精度更高,始终高于文献对比系统,在动态响应过程中,对于角度的控制能力可以达到10rad级别,在稳态响应过程中,对于角度的控制能力可以达到10rad级别。而文献[3]系统在动态响应过程中,对于角度的控制能力为10rad级别,在稳态响应过程中,对于角度的控制能力为10rad级别;文献[4]系统在动态响应过程中,对于角度的控制能力为10rad级别,在稳态响应过程中,对于角度的控制能力为10rad级别。由此可见,在小扰动情形下,本文提出的控制系统控制精度要远远高于文献对比系统控制精度。
上述实验结果表明,在卫星跟踪信号处于大扰动情况下时,本文提出的控制系统控制过程平稳,动态响应中对角度的控制能力可以达到10rad,稳态响应过程中对角度的控制能力可以达到10rad级别;在卫星跟踪信号处于小扰动情况下时,卫星跟踪信号处于大扰动情况下时,本文提出的控制系统控制过程平稳,动态响应中对角度的控制能力可以达到10rad,稳态响应过程中对角度的控制能力可以达到10rad级别。本文设计的基于扩张状态观测器的卫星通信跟踪控制系统无论在何种扰动情况下,在动态响应及稳态响应过程中都能保证稳定且高精度的跟踪控制。本文设计的跟踪控制系统抛弃了传统的跟踪控制系统利用扩张状态观测器分析参数目标要求,提高跟踪控制的精准性,除此之外,在控制过程,本文设计的系统还考虑了阶跃干扰解耦和控制增益问题,因此控制精度要远远高于文献对比系统精度,更加适合应用到实际的卫星通信跟踪控制工作中。
4 结束语
卫星通信对我国偏远地区的信息交互、抗震救灾中的遥感检测具有重要意义,但随着交互信息数据流量的增加,传统的电信号交换跟踪方式无法完成卫星通信跟踪任务,因此本文利用扩展状态观测器设计了基于扩张状态观测器的卫星通信跟踪控制系统,该系统实现了卫星探测数据与地面数据的交互,提升了数据交互的质量,实现了卫星通信的跟踪控制,在卫星通信领域具有重要作用。
本系统存在的不足之处:卫星通信信号在传输过程中会出现一定大小的线性扰动,线性扰动会降低信号的阻抗与损耗,信号传输会受到抑制,在下一次的研究中将重点对此进行研究。