基于惯性传感器的电力线路杆塔倾斜监测装置设计
2022-06-01郭高鹏余萃卓
舒 恺,郭高鹏,张 洁,余萃卓,胡 杰
(宁波市电力设计院有限公司,浙江 宁波 315000)
0 引言
电力线路杆塔作为输配电线路的常见支承部件,是电力系统安全运行的基础。根据电力线路等级的不同,电力线路杆塔具有多种形式。如骨干线路常采用铁塔形式,其投资较高,从投资上允许采用较为昂贵的监测方案如差分GPS测量装置;电网次末端的配电台区等配电线路通常采用水泥杆塔,且由于安装条件所限,可能处于农业灌溉区、滑坡多发区等不良地质区域,情况复杂,一旦因为地质条件变化或人为破坏等导致倾斜、倒塌而不能及时发现和处置,易导致供电甚至人身伤害事故和财产损失。由于这类水泥杆塔数量众多,从工程实际的角度看更需要一种成本较低、安装施工方便的杆塔姿态实时监测解决方案。
当电力线路杆塔发生移位、损坏时其姿态会发生变化,对于长杆状类的杆塔可以用3个方向的倾斜角度简单表征其姿态。常见的姿态测量方法有铅锤法、经纬仪测量、激光雷达测量、差分GPS和惯性传感器法。前三者需要人工操作,不适合在线实时监测,因此目前多采用差分GPS技术和惯性传感器技术实现在线监测,而差分GPS成本和功耗较高,大范围推广应用较为困难。
文中提出了一种基于惯性传感器的电力线路杆塔倾斜实时监测的低成本解决方案,其主要针对配电台区的应用场合,系统由若干台杆塔倾斜监测装置和一台接受主机构成,监测装置由惯性传感器、单片机、通信接口电路和电源变换电路等4部分组成。
1 设计方案
杆塔倾斜实时监测系统由若干倾斜角监测装置(节点)和接受主机构成,接受主机根据系统的通信方式选择不同采用不同的配置,有线通信时台区的通信管理机直接作为数据接受主机,无线通信时选择无线数据传输装置DTU接受数据后再发送至通信管理机,系统结构如图1所示。杆塔倾斜实时监测装置是系统的关键,安装在杆塔上的这种使用场合对装置在温度、低功耗、小体积等方面均提出了一定的要求,因此选型时需要选择不低于工业级且具低功耗特性的元器件。为减少杆塔倾斜监测装置的体积和方便生产制造,选用基于MEMS技术的6轴惯性传感器采集加速度和角速度,具有集成度高、体积小和功耗低等优点。装置以单片机作为数据处理和控制的核心,单片机读取惯性传感器数据后,经过数据解析和滤波等计算出X
、Y
、Z
方向的倾斜角度,然后通过通信电路发送至通信管理机。数据的上传可以配置为LoRa和RS-485两种方式之一,根据工程需要进行选择;供电也分为有线直供和电池两种方式,以满足不同场合的应用需求。
图1 系统结构图
2 杆塔倾斜监测装置硬件设计
电池供电时,硬件设计上相比有线供电在低功耗上提出了特别的要求,为延长电池使用寿命在硬件设计时均应尽可能选用低功耗器件,并在软件设计上采用低功耗的工作策略以降低运行功耗。装置中选用低功耗单片机STM32L151C8T6作为倾斜角监测装置的控制和数据处理核心,单片机通过SPI接口与6轴惯性传感器ICM-42605相连获取加速度和角速度原始数据,通过串口经RS-485接口电路或LoRa模块实现数据上传,电源变换与控制部分根据工作策略给不同的功能电路提供电源供应,装置的硬件组成关系如图2所示。硬件设计采用模块化设计法,可根据系统实施情况选择焊接相关的元件以适应不同需求。

图2 装置硬件组成
2.1 单片机与ICM-42605的连接
STM32L151C8T6是意法半导体公司基于Cortex-M3核心的低功耗单片机,内部包含128 kB ROM、32 kB SRAM和4 kB EPROM,具有SPI和USART等串行通信接口若干,待机电流低至1.11 μA,运行模式时185 μA /MHz。Cortex-M3核的计算性能和芯片的低功耗以及接口资源等均能满足本装置的需求。
惯性传感器选择TDK公司的ICM-42605低成本MEMS芯片,该芯片内部含有3轴陀螺仪和3轴加速度计,加速度测量的最大范围为16 g,角速度最大范围为2 000 dps,量程均可设置;支持SPI、IC等通信方式,内部具有2 kB的FIFO,可降低串行总线的通信频次以减少功耗;此外还有可编程滤波器等资源,能够简化数据处理和电路设计;6轴全开时工作电流0.65 mA,睡眠模式时约7.5 μA,具有低功耗的特点。综合而言,ICM-42605在测量范围、精度、接口方式和功耗等方面均能较好的满足装置设计的需求。ICM-42605与STM32L151C8T6之间通过SPI接口相连,并将可编程触发事件的中断信号引脚与单片机相连,配置为当传感器角度变化超过一定值时给单片机发出信号,电路如图3所示。

图3 惯性传感器接口电路
2.2 对上通信电路
杆塔倾斜监测装置上传的数据较少,速度要求也较低。对于低速率的数据传输场合,工程上比较常见的有两种,一种是采用RS-485接口实现有线通信,二是采用无线通信技术实现传输,典型的无线通信技术有NB-IoT、ZigBee和LoRa等。NB-IoT在通信距离上具有明显优势,但需要公共移动通信网络支持和流量费用;ZigBee通信距离较短、芯片价格较高,更多用在自组网场合; 综合比较LoRa无线通信技术具有无需公网流量、使用简单、通信距离适中和频段可选且无需申请等优点,因此装置选用LoRa通信技术来实现无线传输。
RS-485接口电路需要考虑电气隔离和接口保护,以避免共模干扰和浪涌、静电等带来的问题。设计的RS-485接口电路主要由高速光电耦合器HCPL-0600、差分收发器75LBC184和瞬态电压抑制二极管等组成,光电耦合隔离器HCPL-0600两端采用两组不同的隔离电源以确保电气上完全隔离,瞬态电压抑制二极管能吸收高达数千瓦的浪涌和几十千伏的静电,起到保护接口后端元件的作用。
LoRa通信选用AS32-S20成品无线模块,模块采用SX1278芯片,模块内包含了低噪声放大器、控制用单片机等元器件,可以直接和单片机通过串口相连实现数据透传,避免了对SX1278的底层繁琐操作,可以简化装置端单片机的软件设计。RS-485和LoRa无线通信的接口电路如图4所示。
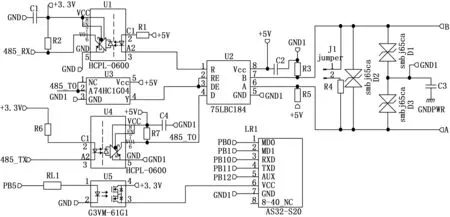
图4 通信接口电路
2.3 电源变换与控制
杆塔倾斜监测装置电路中单片机、惯性传感器和无线模块等需要典型电压为3.3 V的供电,RS-485接口电路需要5 V供电,且要求与单片机等部分的3.3 V供电电源之间是隔离的。综合电源的需求和不同的供电情况,电源变换分两种组合情况分别进行考虑:(1)有线供电和有线通信,此时供电通常由配电台区的通信管理机对装置提供12 V、24 V等直流电源,不同的管理机提供的电源并不相同,因此为了提高装置的适应性,适应宽的输入电压范围和电源隔离的需求,同时考虑电路设计的简化,选用基于开关电源原理的宽输入电压DC-DC隔离模块来实现电源变换。某公司的URB系列DC-DC模块可以接受9~36 V的输入电压,输入输出隔离,且输出具有稳压功能。选用该系列的URB2403S-6WR3和URB2405S-6WR3分别实现输入电压到3.3 V和5 V的转换,给单片机部分和RS-485接口电路供电;(2)电池供电和无线通信,电池供电时低功耗是电源电路设计关注的主要问题,为了充分利用电池容量且由于电池电压随着使用会逐步下降,因此选择压降较小的电源变换芯片,根据所选的某公司标称电压3.6 V的电池放电曲线分析,当电池电压低于2.5 V时其放电电流已经不能满足装置对工作电流的需求,而装置中各芯片和模块的供电电压均在1.8~3.6 V左右,电池欠电压的阈值应预留一定的保险系数,将工作电压定在2.7 V左右,综合比较后选择XC6220B271MR电源芯片,其输出电压为2.7 V,工作电流100 mA时压降约20 mV,相比一般的线性稳压器件而言压降更低,且外围电路简单。电源电路如图5所示,电池供电时主电路为2.7 V,有线供电时主电路为3.3 V,两种供电模式实际工作时为二选一,所以两种电源直接并接在一起,按需焊接。此外,电池供电时采用无线方式通信,分析各个功能电路和模块,根据装置中的软件工作策略,无线通信模块大部分时间均处于非工作状态,且其待机电流相对较高,因此通过单片机控制MOS FET继电器G3VM-61G1(图4中U5)将LoRa电路在非工作时期完全断开供电以尽可能降低功耗。
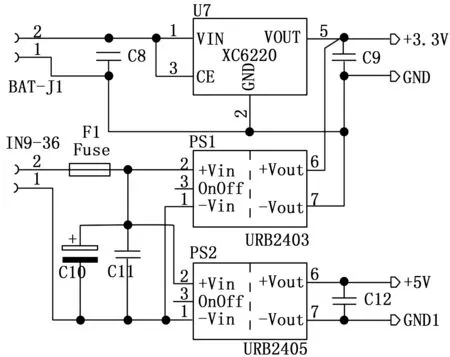
图5 电源电路
3 倾斜角计算与软件设计
3.1 倾斜角计算
杆塔在空间的姿态采用三维空间的3个倾斜角进行表示,通过对惯性传感器中加速度计和陀螺仪输出的数据进行计算均可获得倾斜角数据。设X
、Y
、Z
是参考坐标系的三轴,x
、y
、z
是杆塔倾斜后的惯性传感器的三轴,X
、Y
、Z
和x
、y
、z
对应的夹角为α
、β
、θ
,则α
、β
、θ
即为三维空间的倾斜角,其关系如图6所示。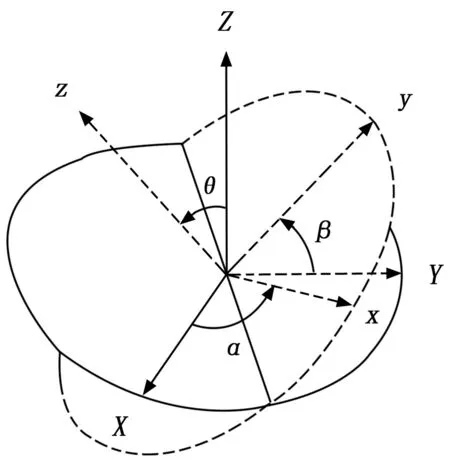
图6 倾斜角的空间表征
加速度测量倾角的基本原理是利用重力加速度与对应轴之间的三角函数关系,按照平行四边形法则获取。对应的倾斜角计算关系如公式(1)所示:

(1)
式中,g
、g
、g
为重力加速度在3个方向的分量。如果影响加速度的唯一因素是重力加速度则倾角的测量精度由加速度计的精度直接决定,但杆塔实际还会收到风力等因素的作用,会导致额外加速度的叠加进入,从而影响测量精度。陀螺仪测量倾角是以初始角度加上角速度的积分获得,如公式(2)所示:

(2)
式中,δ
(k
)、δ
(k
+1)为在时刻k
和k
+1的倾角,ω
为角速度。陀螺仪测量过程中不可避免存在的测量误差、温漂和各种干扰等,随着时间的推移,其累积误差会逐步严重。从上述原理分析可以看到两种方法均存在一定的不足,因此有必要对原始数据进行一定的处理,滤除或降低干扰和原理性导致的误差,并考虑可信度灵活调整两者的权重,从而获得更接近真实值的数据。目前常用的数据处理算法有小波分析、卡尔曼滤波等,这类处理算法计算复杂,如卡尔曼滤波的计算是一个迭代的过程,计算量大,占用CPU时间长,对处理器提出了一定的要求,不太适合嵌入式实时系统尤其是在低功耗、低成本的单片机系统上运行。
陀螺仪测得的角速度通常夹带有低频噪声,加速度计往往伴有高频噪声。采用互补滤波法通过高通滤波器和低通滤波器分别对陀螺仪和加速度计的信号进行滤波,然后再添加不同的权重求和,获取处理后的倾角。互补滤波器的计算简单,效率高,非常适合低性能处理器的工作场合,其数学表达式如公式(3):
φ
=K
*δ
+(1-K
)δ
(3)
式中,φ
为计算出的倾角,δ
、δ
分别为通过陀螺仪和加速度计计算出的倾角,K
为互补滤波器系数。杆塔并非静止不动,受风力等外力因素影响线路会产生舞动从而带动杆塔的角度变化。线路舞动带来的钟摆式效应和工作环境种的工频电磁干扰,对应的机械和电磁信号的干扰会施加到传感器的姿态和电路上,表现为传感器输出的原始数据会中会有数值的周期性波动。且由于计算倾斜角度需要对陀螺仪数据进行积分计算,积分计算对大波动较为敏感,如果不剔除尖峰可能会引起误差的增大且需要较长时间才能消除,因此对原始数据采用去极值平均滤波进行预处理,以初步降低或消除周期性和尖峰类的干扰。
3.2 软件设计
软件按功能分为惯性传感器数据获取、倾角计算、通信和参数配置等模块。系统上电后,先读取拨码开关状态判断进入配置模式和不同的运行模式。软件的工作模式在电池供电和有线供电采用不同的工作机制,其中电池供电模式下的软件流程如图7所示。
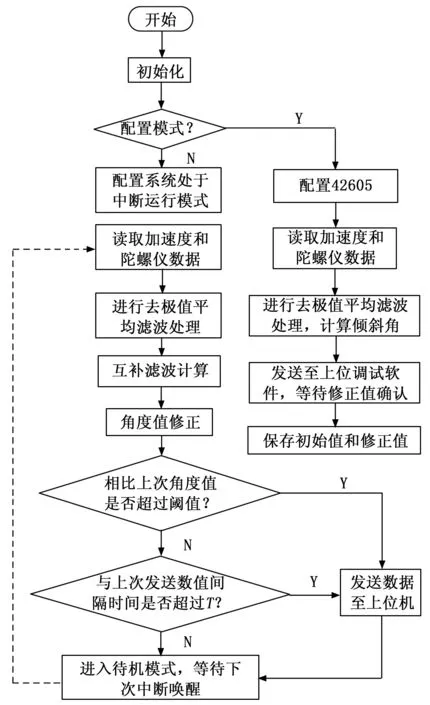
图7 电池供电模式下的软件流程
配置模式主要工作是根据现场安装的情况设置初始参数。考虑杆塔倾斜测量装置现场安装的方便以及杆塔的安装已经既成事实的情况下,不可能要求杆塔本身处于完全垂直的理想状态,而且由于监测装置需要固定于杆塔上,也不可能做到监测装置外壳以及监测装置内的6轴惯性传感器和杆塔的3个方向完全重合,也就是由于制造、安装等原因必然会和理想的坐标系存在偏差,因此需要对这些原因造成的初始偏差角度进行测量,后续的测量在此基础上进行修正,使得后续在线测量能获得相对准确的倾斜角度和相对安装时的变化量。相对安装时角度的变化量是杆塔倾斜在线监测关心的重点,表明了杆塔的姿态变化幅度。
配置模式时首先对惯性传感器进行设置,设置相关寄存器,读取加速度和角速度数据,然后对数据进行去极值平均滤波后按3.1所述算法计算出倾斜角度的初始值,以X
方向的倾角α
为例进行说明,设初始值为α
,后面在线监测时测得的角度设为α
,则α
-α
为实际的倾斜角变化量和相对初始状态的倾斜角度。此外,由于惯性传感器测量和安装的偏差,初始值α
和实际杆塔的角度可能也存在偏差,在对精度要求比较高的项目或者要求测量绝对角度的项目上,可以在施工现场通过铅垂线法、经纬仪等方法人工测量实际的倾斜角度,设测得的倾斜角度为φ
,则α
+φ
-α
为在线测量的绝对角度。配置模式时将α
和φ
这两个参数经过确认后再保存,参数的确认通过扩展的RS-485或LoRa接口与计算机通信,将测得的参数通过自定的通信协议发送至计算机,通信报文格式如表1所示,其中α
、β
、θ
为安装后X
、Y
、Z
三方向从惯性传感器获取的初始角度值,φ
、φ
、φ
为安装后X
、Y
、Z
三方向的实测初始角度值,每个参量均用双字节表示。计算机采用串口调试软件读取和发送修正数据,读取到的单片机发来的角度数据和实测的数据经人工判断后再发送回单片机,单片机读取到计算机发来的数据后存入单片机的E
PROM区域,用于运行模式时的参数计算。如果单片机发来的角度数据和实测的角度数据差值过大,可以认为倾角测量装置存在一定的问题,采用这种收发确认的配置模式有利于可以及时发现。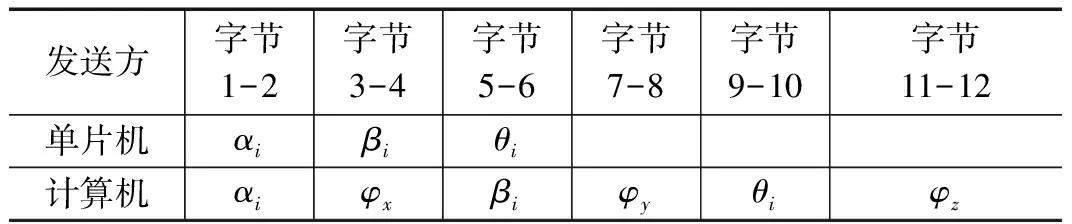
表1 通信报文
由于装置需要适应电池供电和有线供电两种模式,其中电池供电有低功耗的需求以延长电池使用寿命,在硬件设计上尽可能考虑低功耗器件后,还需要通过软件层面的工作机制设计以进一步降低功耗。在线监测更多关注被测量的变化量大小,当其变化较大时希望能及时获取,如果被测量变化量不大甚至没有变化,一直反复读取其数值并没有太多实际意义,尤其对于杆塔倾斜这类缓变的物理量监测而言更是如此。倾角测量装置采取下位机主动发送的方式,基于两种情况触发数据的发送,一是在两次采样之间进行对比,当相比上次的倾斜角度变化大于设定的阈值时进行发送,这种逻辑当变化量很小时可以减少发送次数,从而降低功耗;二是当超过一定的时间间隔没有发送数据至上位机时,不管监测的数值变化大小也发送一次,这种逻辑的目的时为了定期和上位机进行通信,避免数据太久不更新影响用户体验或者误以为装置发生宕机故障。通过合理的变化量阈值和发送时间间隔设定将两种模式相结合可以在减少通信次数和及时更新数据之间获得一种平衡。由于串行通信是本系统中各功能模块功耗较高的部分,因此这种模式对降低功耗起到显著作用。
杆塔倾斜监测装置工作时是间隔一定的时间采样一次,在采样和数据处理完成后,单片机没有计算任务,处于空闲状态,因此将单片机设置在定时中断模式工作以降低功耗。通过定时器设置,每隔一定时间唤醒单片机循环执行传感器数据的读取、倾角计算和通信等既定功能,执行完后再进入睡眠模式。此外,惯性传感器ICM-42605支持运动唤醒输出控制信号,即当传感器检测到角度变化时从其中断引脚输出信号,将该中断信号和单片机的外部中断连接。为简化程序逻辑,定时器中断唤醒单片机工作时,关闭外部中断,进入睡眠模式前开启外部和串口中断,确保处于睡眠模式期间一旦角度发生变化也能得到及时响应。
当装置采用有线供电和通信时,通信管理机和倾斜角测量装置之间通过RS-485接口直接相连,多数通信管理机均提供对Modbus RTU协议的支持,因此测量装置部分也采用Modbus RTU协议进行通信以方便系统集成。杆塔倾斜监测装置为从机,通信管理机为主机,根据主机的问询进行响应。这种模式下基本无需考虑低功耗,程序架构主体采取循环执行的逻辑,依次进行传感器数据读取和数据计算以及等待通信等子程序。
在LoRa无线通信方式下,管理机外配支持Modbus RTU的LoRa无线数传电台DTU实现测量装置和管理机之间的无线到有线的转换和通信协议的转换。DTU和管理机之间的Modbus RTU通信,DTU是从机,管理机是主机;DTU和倾斜角测量装置之间的数据透传,倾斜角测量装置主动发送,DTU被动接受。
4 实验验证
简易的实验装置按如下方法搭建:将杆塔倾斜监测装置固定在长杆上,利用铅垂线方法确定垂直线,交叉的两个水平仪确定基准平面,长杆移动过程中杆会有一定的晃动,从而可以模拟风力等导致的杆塔轻微晃动。考虑实验的简便,而且当倾角过大时可以认为杆塔已倒塌或损毁,此时失去了在线测量的意义。实验选取在XZ
平面内进行0~45°的倾斜度测试,每隔5°选取一个测量点,不同单元输出的倾斜角部分数据如表2所示。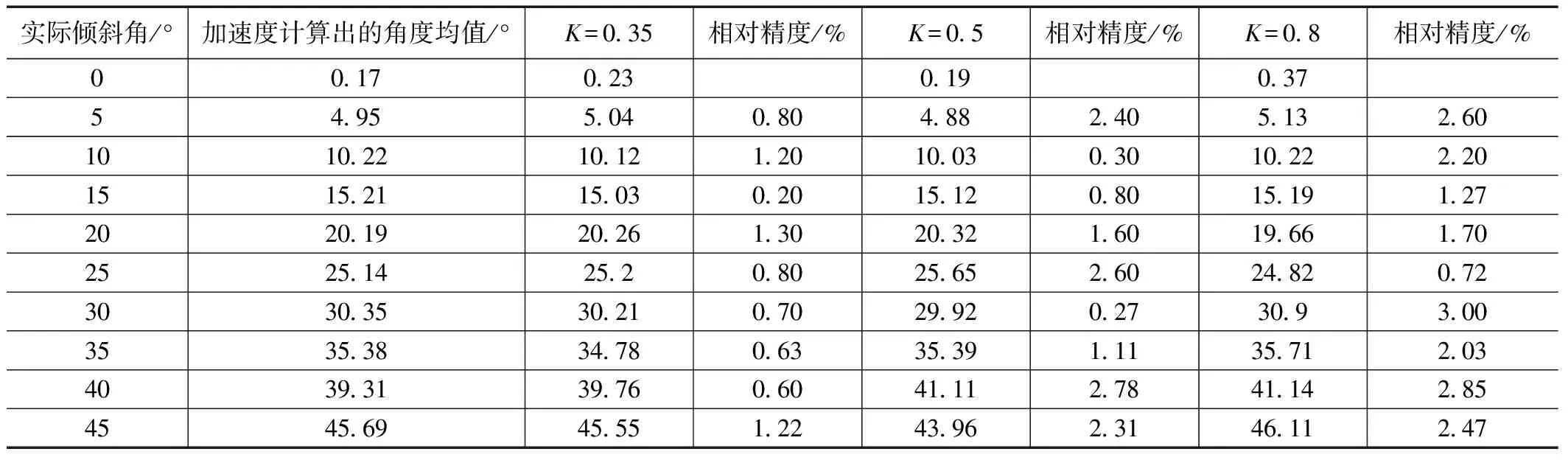
表2 不同单元输出的倾斜角数据对比
从表2中可以看出,根据加速度计直接计算出的角度误差较大,而采用互补滤波法计算出来的角度在不同的系数下,相差误差有一定程度的减小。当加速度计测得的倾角占较高权重时,互补滤波器输出的角度和实际角度更为接近,分析其原因,应是杆上的加速度以重力加速度为主,杆子轻微晃动叠加进去的加速度经过预处理可以得到一定的抑制。从相对精度看,当权重系数K
=0.35时,获得的测数据相对精度可控制在1.30%以内,已经完全能够满足杆塔在线监测的精度要求。5 结束语
针对电力线路杆塔特别是台区用杆塔的倾斜测量,以低功耗为设计考量的重要出发点,提出一种通过惯性传感器获取加速度和角速度的原始数据,经去极值平均滤波和互补滤波算法获取倾斜角的电力线路杆塔倾斜实时监测装置。经过实验表明,利用好常规的滤波算法,调节参数得当,也能获得较好的测量精度,这为杆塔倾斜监测时对成本敏感的场合提供了一种低硬件开销的解决方案。本设计针对台区场合进行设计,杆塔倾斜监测装置和通信管理机距离较近,因此点对点直接传输就可以满足,如果能对手拉手的无线通信策略进行研究,达到在功耗、通信距离和可靠性以及成本等多方面全面满足用电侧杆塔倾斜的监测,这将会有更大的应用空间。