标定脉宽对冲击传感器标定结果的影响
2022-06-01房远勇杨克辛戴宜霖
房远勇,吴 健,杨克辛,罗 丹,戴宜霖
(1.北京强度环境研究所,北京 100076;2.北京航天计量测试技术研究所,北京 100076)
1 引 言
冲击加速度传感器作为振动传感器的一个小分支,标定方法与振动传感器不同。振动传感器灵敏度标定以160 Hz振动下采用比较法进行,振动传感器幅值线性度同样采用单一频段振动法进行。振动方法标定灵敏度、线性度存在较大的限制,对于振动加速度值较大的测量需求难以实现。冲击加速度传感器幅值线性度无法用振动法进行标定,通常采用冲击法。
冲击加速度传感器主要用于瞬态冲击动态信号的测量,这就需要传感器有良好的动态特性,因此,对冲击传感器的动态特性校准十分必要。传感器的动态特性可以通过时域和频域两种分析方法进行描述,其中频域方法应用更为广泛。通常以工作频带的频域指标作为统一的量化指标,在对冲击传感器进行标定过程中,标定机构往往只关注标定线性度结果和标定量级,对标定脉宽重视程度不够。在传感器允许频带范围内,脉宽变化并不影响标定结果,超出允许频段的标定结果随着脉宽变化而变化。
本文针对冲击传感器在标定时不同脉宽对标定结果的影响进行分析,以霍普金生杆、空气炮作为激励信号发生装置,测量不同脉宽作用下冲击传感器灵敏度测量差异。结合传感器自身频率响应范围,描述传感器冲击标定过程中存在的问题。
2 冲击传感器标定设备及方法
霍普金生杆标定设备弹体在高压气体作用下进行发射,冲击霍普金生杆一端通过长直杆传递至另一端传感器,系统组成如图1所示。霍普金生杆标定大多采用激光测振仪或者应变测振仪作为标准,对被测传感器进行标定。通过被测传感器输出与激光测振仪或者应变测振仪在各个量程作为对比,确定传感器的灵敏度及线性度。

图1 霍普金生杆标定设备系统组成Fig.1 System composition of Hopkinson rod calibration equipment
空气炮标定装置设备组成如图2所示。通过霍普金生杆装置发射出弹头,弹头冲击传感器安装底座。在冲击校准中,被校冲击传感器与参考冲击传感器背靠背安装,在同一激励下对两只传感器输出的电压信号或者电荷信号进行对比,得出被校传感器的冲击校准灵敏度。通过改变不同的气压获得不同冲击量级,对传感器各个量级获得的灵敏度与标准传感器进行对比,最终获得传感器的线性度与灵敏度偏差。在空气炮标定时标准传感器量程不大于10 000 g,对于空气炮标定大于10 000 g时可以采用激光测振仪作为标准。

图2 空气炮标定设备组成Fig.2 Composition of air gun calibration equipment
3 不同脉宽标定结果
空气炮冲击标定装置时,冲击标定范围小于20 000 g,对于20 000 g以上冲击标定采用空气炮难以实现。在空气炮上对北京强度环境研究生产的6175冲击传感器进行标定,标定结果见表1。

表1 空气炮标定结果Tab.1 Calibration results of air gun
同一冲击激励,采用不同的气炮气压进行线性度标定,采用激光测振仪作为标准,其测量数据如表1所示。从试验测得的结果表明冲击传感器灵敏度的幅值线性度满足GB/T 13823.20—2008要求(≤10%)最大偏差小于3%。
空气炮标定装置限制无法进行更高量级标定,6175型传感器测量范围为±50 000 g,采用霍普金生杆进行标定,从10 000 g~50 000 g,标定结果见表2。

表2 霍普金生杆标定结果Tab.2 Calibration results of Hopkinson
霍普金生杆进行测试结果传感器线性度最大偏差同样小于3%,线性度满足GB/T 13823.20—2008要求。对于同一只传感器两种设备标定传感器输出灵敏度偏差较大,空气炮标定结果传感器灵敏度约为0.25 pC/g,与振动法标定传感器灵敏度标定结果一致,霍普金生杆标定结果为0.4 pC/g,两种标定方法得出的结果存在较大差异。导致差异的主要原因是空气炮冲击标定脉宽与霍普金生杆标定时脉宽不一致。

图3 霍普金生杆标定现场Fig.3 Hopkinson calibration site
4 脉宽导致标定差异原因分析
传感器标定过程中将传感器安装于标定设备上,传感器安装谐振频率对标定结果有较大的影响。对于普通压电类传感器安装谐振频率低于50 kHz,安装谐振频率处由于传感器存在一定程度的共振使得传感器输出灵敏度有所放大。
传感器安装于标检工装上,可以等效于二阶系统幅频特性,典型模型如图4所示。

图4 加速度传感器典型模型Fig.4 Typical theoretical model of acceleration sensor
该模型的数学表达式为

式中:b——系统所受激励幅值;x——系统所受激励的时域描述;t——时间。
其中,a=m,a=c,a=k。


可得频率响应函数
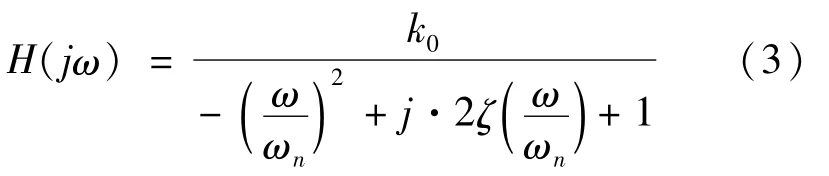
式中:j——复数阈;ω——角频率。
幅频特性

传感器安装频率响应曲线如图5所示。当ω值等于固有ω时赋值放大到峰值。

图5 传感器理论安装频响曲线Fig.5 Theoretical installation frequency response curve of sensor
传感器安装谐振频率测试主要考核传感器对不同频率放大的作用,在安装谐振点处传感器输出具有共振放大效应。传感器安装频率响应曲线平直段决定传感器使用的频率范围。
通过中国计量科学研究院标定,6175冲击传感器安装谐振频率为43.5 kHz,10 kHz以内幅值偏差小于5%,15 kHz以内的幅值偏差小于10%,标定结果如图6所示。传感器5%偏差许用频段为10 kHz,10%偏差许用频段为15 kHz。

图6 频响标定结果Fig.6 Frequency response calibration results
对于传感器系统进行理论描述,已知系统的传递函数,并给出系统的输入时间历程,如果输入是一种冲击过程,或称冲击激励,系统的输出就是系统的冲击响应。根据连续时间系统传递函数定义

Y(s)的拉普拉斯逆变换就是系统的响应

同理,对于离散时间系统:

Y(z)的z逆变换就是系统的离散时间响应

测量系统连续时间响应时的标定过程多采用矩形、半正弦和后峰锯齿形冲击脉冲作为激励信号,实际标定过程中采用半正弦信号较为普遍,为了定性分析以正弦信号作为激励进行分析。正弦激励信号a(t)描述为

式中:a——激励信号幅值;T——半正弦脉冲持续时间。
加速度计对冲击加速度激励的响应,只需要将激励冲击加速度x(t)=a(t)的拉氏变换、加速度计的传递函数公式(3)和激励函数a(t)代入公式(5),得到响应的拉氏变换Y(s)的拉氏逆变换,即可得到加速度计的冲击响应y(t)。加速度计对半正弦单位加速度脉冲的响应为

当0<t≤T时,y(t)=g(t),t>T时,y(t)=g(t)+g(t-T)。
由公式(11)可见,加速度计对冲击激励的响应较原输入激励,无论是幅值、相位还是波形都发生了变化。这些变化取决于激励波形、脉冲持续时间和加速度计的结构参数。传感器正弦脉冲响应输出如图7所示。
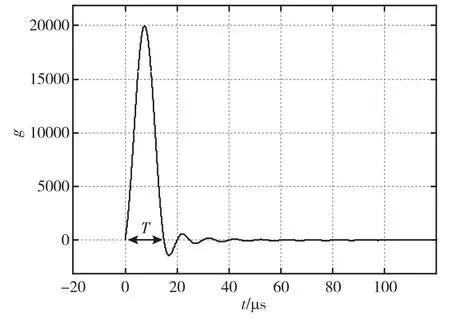
图7 传感器时域响应Fig.7 Time response of sensor
半正弦脉冲持续时间T作用于传感器系统,传感器在半正弦冲击以后响应是以2T为周期响应,输出幅值为频响曲线上以2T为周期的频率信号对应的幅值响应。对于6175传感器5%容差为10 kHz,10%容差为15 kHz,大于15 kHz信号作用于传感器信号幅值将放大明显,导致标定误差超出GB/T13823.20—2008要求。在安装谐振频率处,传感器输出幅值随着频率接近于安装谐振频率具有放大作用,远离谐振频率时幅值随着谐振频率增加迅速减小。
某次冲击标定时域输出如图8所示,冲击信号等效为半正弦标定。冲击标定时冲击在标定过程中最小脉宽为0.055 ms,冲击测试过程中以半正弦等效冲击信号,因此信号频率可以简化为0.11 ms周期信号,信号频率约为9 kHz。霍普金斯杆标定信号脉宽见表2,约为0.02 ms,信号等效约为0.04 ms周期信号,信号频率为25 kHz。

图8 冲击时域波形Fig.8 Impulse time domain curve
传感器安装频响曲线如图9所示,传感器安装谐振频率约为43 kHz,25 kHz时幅值偏差约为55%。根据标定结果气炮标定为0.25 pC左右,霍普金生杆标定结果为0.38 pC,与频响曲线结果较为一致。

图9 6175型传感器实际频响曲线Fig.9 Frequency response curve of 6175 type sensor
通过表2可以看出,在同一脉宽条件下6175系列冲击传感器具有较高的线性度,说明该款传感器在不同频段具有较高的一致性。安装谐振频响导致的线性度偏差,可以通过改变传感器结构以及安装方式等提高传感器安装谐振频率,使得传感器有更高的使用频率。
5 解决脉宽导致标定差异的方法
在不改变装置状态的情况下,冲击脉宽将变窄。在传感器许用频响范围内标定将不受脉宽变窄影响。空气炮标定装置以及霍普金生杆标定装置可以通过更换弹体大小或者增加缓冲等方式使得冲击脉宽增加。增加弹体对被冲击对象接触面积,脉宽将随之增加。在不改变弹体的情况下,在弹体与被冲击对象之间增加缓冲垫等,同样会使得脉宽增加。标定冲击传感器时必须注意脉宽持续时间,避免标定差异存在。6175型号冲击传感器5%灵敏度偏差带宽为10 kHz,信号周期约为0.1 ms标定时候脉宽控制在0.05 ms以上,标定结果不受安装谐振频率影响。控制脉宽后对同一只传感器进行霍普金生杆标定标定结果见表3。

表3 控制脉宽后霍普金生杆标定结果Tab.3 Calibration results of Hopkinson lever under controlling pulse width
标定结果最小脉宽为0.05 ms,周期信号持续时间约为0.1 ms,等效信号频率为10 kHz。由表3结果显示:在控制脉宽情况下,传感器标定结果较为理想,最大偏差为2.3%。在实际使用冲击传感器过程中,主要关注传感器对低频部分的测量准确度。在爆炸冲击或者撞击冲击过程中,20 kHz或者15 kHz以内,信号具有能量大、破坏力强的特点,对于高频冲击具有能量小、信号成分复杂等特点,工程应用过程中采用低通滤波的方式对高频信号进行滤除,避免对低频信号测量结果的影响。
6 结束语
本文分析了标定脉宽与传感器标定结果之间的关系,针对不同脉宽,结合传感器安装谐振频率进行了定型分析,得出不同脉宽导致不同标定的结果,是因为安装谐振频率峰值附近会导致传感器输出具有放大效应。传感器安装谐振频率一般不大于50 kHz,因此脉宽减小导致的激励频率增加,在频响曲线上表现为传感器输出灵敏度被放大。为了避免标定脉宽对传感器线性度的影响,在标定过程中,需要通过冲击标定装置对脉宽进行控制,使得标定脉宽在传感器允许频响范围内进行。对于不同的标定设备,通过增加缓冲装置的方式控制脉宽是一种可行性高的方案。本文提及的观点对于冲击传感器标定具有一定的现实意义。
