无人驾驶交通事故中的刑事责任及其分配
2022-05-31徐永伟
徐永伟 袁 彬
一、无人驾驶的技术面向及其刑法教义学意蕴
当前,包括我国在内的诸多国家都争相开放自动驾驶道路测试,并为自动驾驶汽车发放路测牌照。整个世界范围内,围绕自动驾驶技术的研究与实测已经成为交通产业变革的先声。而伴随自动驾驶技术的智能化演进,交通领域的彻底颠覆已经成为势不可挡的趋势。
(一)自动驾驶的技术分级与规范区隔
根据我国工业和信息化部最新发布的《汽车驾驶自动化分级》推荐性国家标准(2021年1月1日正式实施),基于驾驶自动化系统能够执行动态驾驶任务的程度,可以将驾驶自动化分成0至5级。这也是我国首个自动驾驶汽车分级标准,其驾驶自动化等级与划分要素的关系,如下表所示:(1)2021年9月22日,我国市场监管总局针对自动驾驶功能正式出台了《汽车驾驶自动化分级》国家推荐标准(GB/T 40429-2021),该标准将于2022年3月1日正式实施。这一自动驾驶分级与工业和信息化部《汽车驾驶自动化分级》推荐性国家标准保持了一致。
可以发现,当前自动驾驶的概念其实同时涵盖着“辅助驾驶”“人机共驾”与“无人驾驶”的范畴,(2)袁彬、徐永伟:《“人机共驾”模式下交通肇事罪的适用困境与突围》,《广西大学学报》(哲学社会科学版)2019年第5期。分别指向0级—2级的驾驶自动化、3级驾驶自动化、4级—5级驾驶自动化。在实践中,三种类型的自动驾驶概念基本不作区隔,并为制造商、营销商、媒体、学者、社会大众等不同立场下的解读者进行差异化定义。(3)比如,自动驾驶汽车生产商、营销商为误导消费者,就常常将仅具有辅助驾驶功能的自动驾驶汽车称之为无人驾驶。但毋庸置疑,它们的驾驶自动化意义是不同的,也应当进行区别性的规范解读。具体而言,辅助驾驶及“人机共驾”的自动化意义在于“驾驶行为的机器代理”,无论是基于风险提示、协助决策还是对车辆控制的介入,本质上都是通过对部分驾驶行为的机器代理来减轻驾驶的人力负担、提高驾驶的安全系数。因而,即便是在第3级别的驾驶自动化,驾驶人依然需要监控车辆行驶状况以便随时接管驾驶。相较而言,无人驾驶的自动化意义则在于“驾驶行为的机器替代”。(4)洪政纬:《无人驾驶法治迈向新纪元——德国立法允许自动驾驶汽车上路》,《科技法律透析》2017年第5期。换言之,人的驾驶行为不复存在,而驾驶人的概念也将走向消亡。在这其中,无人驾驶的自动化意义显然更具刑法理论的升华价值与前瞻意义。理由在于:
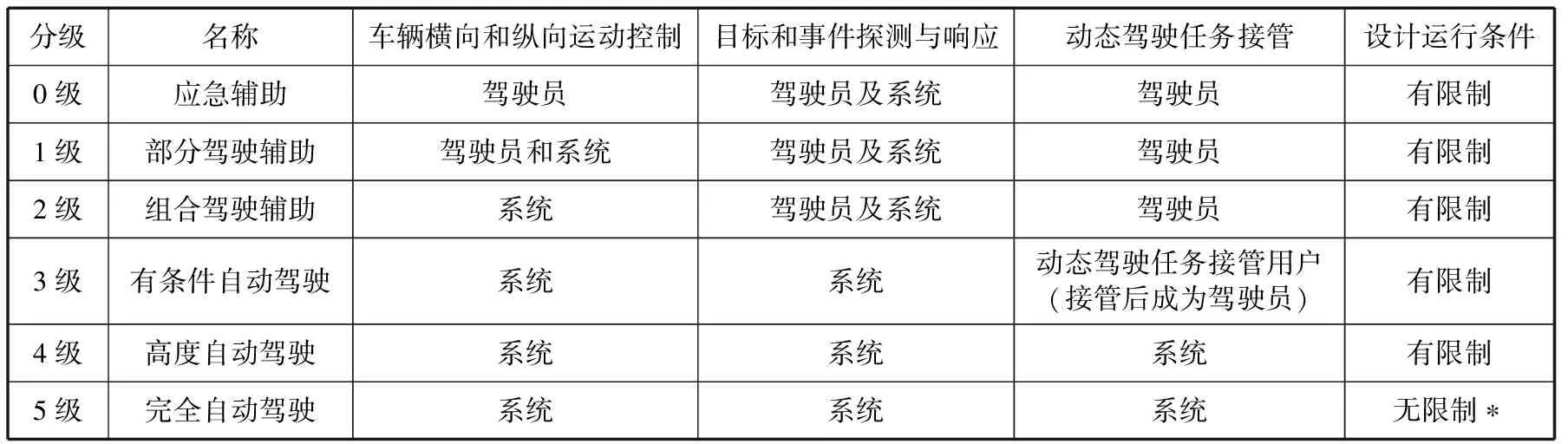
表1 驾驶自动化等级与划分要素的关系
第一,辅助驾驶及“人机共驾”的自动化意义所表征的技术路径是“人体器官的延长”,机器只是人的“代理者”,(5)李河:《从“代理”到“替代”的技术与正在“过时”的人类?》,《中国社会科学》2020年第10期。由此带来的规范适用变迁基本上可以为刑法理论的“自适应”所消解。但对于无人驾驶而言,其自动化意义所表征的技术路径是机器对人的“替代”,这带来的规范适用变迁则很大程度上需要突破现有刑法理论的桎梏进行知识框架的重新搭建。
第二,人工智能的技术赋能更多地呈现在无人驾驶领域,人们当前对自动驾驶的憧憬与寄托实际上指向的也是无人驾驶,例如“人类被更为可靠的自动驾驶所取代,它们既不喝酒,也不会承受压力,更不会忽视交通规则,交通事故就会因此减少百分之九十”,(6)S.A.Beiker,“Legal aspects of autonomous driving”,Santa Clara Law Review, Vol.52,No.4,2012,pp.1145-1156.“被排除在独立驾驶之外的人(例如儿童、老年人和残疾人)都将能够在同等条件下上路”(7)J.K.Gurney,“Crashing into the unknown:An examination of crash-optimization algorithms through the two lanes of ethics and law”,Albany Law Review, Vol.79,No.1,2016,pp.183-268.等等。
第三,无人驾驶是辅助驾驶与“人机共驾”发展的必然结果与终极目的,但两者并非技术发展上的渐进关系。申言之,自动驾驶的发展并不必然遵循0级—4级的技术升级规律,而是可能会随着关键技术、生产成本等瓶颈的突破直接过渡到无人驾驶阶段。尤其是伴随5G技术的迅速普及,无论是对外部物联网低延时互联互通的推进,还是在内部传感器数据处理接近(或超过)人反应时间的实现,都将极大地推动无人驾驶汽车的“落地”。因而,作为全球最先布局5G技术市场的中国,在当前阶段就妥善考虑无人驾驶的刑事责任问题并非是“泛人工智能化的学术研究”,(8)刘艳红:《人工智能法学研究的反智化批判》,《东方法学》2019年第5期。而是刑法学人在人工智能时代的未雨绸缪之举以及时代责任所负。
第四,前瞻性的法律制度建设是技术变革的“催化剂”与“稳定剂”,在“抢抓人工智能发展的重大战略机遇,构筑我国人工智能发展的先发优势”这一时代背景下,具有先导性的责任机制设计更是实现无人驾驶技术“弯道超车”的关键所在。相反,“不明确的责任最终将会成为阻碍无人驾驶汽车进入市场的制度性障碍”。(9)翁岳暄、多尼米克·希伦布兰德:《汽车智能化的道路:智能汽车、自动驾驶汽车安全监管研究》,《科技与法律》2014年第4期。
因此,本文选取更具规范性、前瞻性讨论价值的无人驾驶作为因应人工智能时代的刑法命题,以探求其自动化意义背后的刑法教义学意蕴。
(二)无人驾驶的技术面向
1.无人驾驶自主化的技术面向
更准确地讲,无人驾驶的“自动化”应当称之为“自主化”,强调的是一种非机械性、非预设性的自动化。换言之,无人驾驶是人工智能技术赋能下的“自主驾驶”(autonomous driving),而非“自动的无人驾驶”(automated driving)。两者的区别在于:后者是在一个给定的范围内,由机器遵循既定的脚本(scenario)把多项功能自行串起来执行的驾驶技术;而前者则不需要给定范围,完全由机器自主地完成驾驶任务。举例来说,假设无人汽车是循着固定的车道或轨道行驶,不能偏离该预设的车道或轨道,那就属于“自动的无人驾驶”。一旦在运行车道上出现障碍物等状况时,“自动的无人驾驶”可以改变速度去避免碰撞、也可以停下来,但却无法自行离开车道去闪避障碍。而“自主驾驶”的无人汽车则可以自己判断邻近车道的可行的情况,然后重新制定新的驾驶路线。(10)胡竹生、王乐智:《自驾车的未来与挑战》,《机械工业杂志》2019年第4期。
无人驾驶自主化的技术面向,其实践过程呈现为:环境感知——路径规划——控制与执行。具体而言:(1)环境感知:基于深度学习的计算机视觉,无人驾驶汽车可以通过摄像头、激光雷达、超声波雷达、GPS等获取环境状态信息与车身状态信息,从而获得相应的感知能力,进而完成一系列复杂的路况检测;(2)路径的预测规划:无人驾驶汽车根据出行需求,利用高精度地图的定位技术绘制出自出发点至目标点的无碰撞、可通过的路径,再由算法模型依照行驶过程中所获取的环境数据等实时作出最优路径选择;(3)控制与执行:根据算法模型作出的路径规划,自主地实现对车辆的行驶控制。可见,无人驾驶汽车能够完全自主地感知、决策与执行,从而在技术层面消解了人类驾驶人的角色及其责任。
2.无人驾驶“黑箱”化的技术面向
人工智能技术在算法(algorithm)模型的构建上主要借助了计算机领域的深度学习(deep learning),即利用人工神经元广泛互连的运作机制。(11)付亦宁:《深度(层)学习:内涵、流变与展望》,《南京师大学报》(社会科学版)2021年第2期。在具体的实现层面,其经历了一个前、中、后期的发展历程:前期主要采用的是“监督学习算法”(supervised learning algorithms),将采集的数据进行人工标注后进行训练,再通过参数的调整形成最优的算法模型;中期采用的是“无监督学习算法”(unsupervised learning algorithms),直接从未标注的数据本身得到数据的性质,再基于数据总结或对数据分组,以推进数据驱动的决策,在这一过程中,由于“不存在数据和预定义模式组成的培训集,往往能够创建新的、意想不到的模式”;(12)T.Zapusek,“Artificial intelligence in medicine and confidentiality of data”,Asia Pacific Journal of Health Law & Ethics, Vol.11,No.1,2017,pp.105-126.后期技术成熟阶段的“强化学习算法”(reinforcement learning algorithms),则是通过自主性的奖惩机制实现算法的自我提升和改进。
上述算法模式的演进脉络,其实展现的是算法决策逐渐“去人类化”的过程与走向,相应地,算法的过程与结果也越来越难以被人类所解释或演算。而建立在“无监督学习算法”和“强化学习算法”模型下的无人驾驶操控过程更是如此,利用现有的人类技术与知识可视化手段是无法做到调制、也无法作出解析的。因而,随同算法训练模式的革新,无人驾驶的技术过程呈现出来的完全是一种“黑箱”模型。
(三)无人驾驶技术面向的刑法教义学解构
因应无人驾驶技术面向上的自主化、“黑箱”化特征,有必要进行刑法教义学上的解构,探求其背后刑法理论资源与解释原理的结构性变化,进而明确其在刑事责任承担中的现实意蕴。
对无人驾驶技术的自主化特征而言,其将导致归责根据与注意义务理论发生深刻的变革。这包括:其一,“人类驾驶人角色在技术层面的消解,会导致交通肇事罪的主体在规范层面的缺位”,(13)黄波:《自动驾驶交通肇事的刑法应对》,《天府新论》2018年第4期。由此,在刑事责任的承担上,原本由人类驾驶人承担的刑事责任就需要重新进行分配,否则就会造成“过失犯中归责的间隙”;(14)储陈城:《人工智能时代刑法归责的走向——以过失的归责间隙为中心的讨论》,《东方法学》2018年第3期。其二,无人驾驶技术的自主化将“导致以人为中心建立的各种交通规则和概念体系逐渐消亡”,(15)车浩:《刑事法治关山万里 刑法研究稳步前行》,《中国社会科学报》2017年12月27日,第4版。交通肇事罪围绕驾驶人所构建的过失责任体系(结果预见义务、结果回避义务)也将失去意义。
对无人驾驶技术的“黑箱”化特征而言,其将导致过失责任的判断与因果关系理论发生深刻的变革。这包括:其一,“无人驾驶机动车交通事故责任的基本性质是车的责任”,(16)杨立新:《用现行民法规则解决人工智能法律调整问题的尝试》,《中州学刊》2018年第7期。但对无人驾驶汽车的产品责任进行刑法归责的过程中,算法的不可解析性将导致无法回溯考察生产商、研发者是否具有预见可能及结果避免可能,易言之,传统过失责任的判断法则不复存在;其二,算法“黑箱”性导致无人驾驶交通事故中“实行行为与危害结果之间的可解释性几乎难以证立”,(17)卢有学、窦泽正:《论刑法如何对自动驾驶进行规制——以交通肇事罪为视角》,《学术交流》2018年第4期。申言之,传统因果关系的归责体系也近乎失灵。
对无人驾驶技术的刑法教义学解构,表明我们已经无法在熟悉的刑法语境与场域中自如地讨论无人驾驶交通事故中的刑事责任问题。不法层面(因果关系与结果归属)、责任层面(过失责任)引发的归责障碍将导致传统交通事故中的责任体系走向崩溃,必须基于无人驾驶的现实技术导向,重构交通事故中的刑事责任及其分配体系。
二、无人驾驶交通事故中的刑事责任范围
重构无人驾驶交通事故中的刑事责任及其分配体系,首先需要梳理和明确其刑事责任的范围。当然,刑事责任范围的确定并不仅仅是一个具象的刑法教义学问题,还是一个抽象的刑事政策问题。进言之,刑法既要面向潜在的受害人考虑现实的法益保护,同时又要面向国家战略考虑预留人工智能发展的风险容许空间。因而,无人驾驶交通事故中的刑事责任范围实质上是一种风险分配与利益平衡的结果。
笔者认为,可以通过从“责任性质——责任界限”两个层面合理地界定无人驾驶交通事故中的刑事责任范围。其中,责任性质的厘定所要解决的是交通事故刑事评价的类型问题,主要通过“产品责任的主导原则”来实现。责任界限的划定所要解决的是交通事故刑事评价的限度问题,主要通过“风险的分担原则”与“风险的分解原则”来完成。
(一)责任性质的厘定:交通事故刑事评价的类型
事实上,交通事故中的刑事评价均具有二重性,即交通肇事刑事责任与产品刑事责任。由于普通汽车的生产、制造技术早已臻于完善,因而交通事故的刑事归责主要集中在驾驶人的交通肇事刑事责任,基本上不涉及产品刑事责任。况且,即便是存在着产品的瑕疵,除非已经达到了驾驶人无法控制的程度,否则,产品瑕疵与危害结果之间的因果关系都可能会被驾驶人的过失行为所中断。但进入到无人驾驶场域中,由于驾驶人角色的消亡,交通事故就主要呈现为产品事故,相应地,产品刑事责任也将取代交通肇事刑事责任成为主导的责任类型。(18)当然,一旦将产品刑事责任确立为无人驾驶交通事故中主导的刑事责任类型,现有的罪名体系(如生产、销售不符合安全标准的产品罪)显然是无法满足刑法规制需要的,罪名的扩充、罪责的拓展就将成为必然。
第一,人类由驾驶人到乘客的角色变动,导致其不再属于交通肇事罪适格的责任主体。虽然无人驾驶汽车具有独立的自主意志,但目前尚不承认人工智能(体)具有刑事责任主体资格,“刑法理论学说仍不愿意将犯罪的责任归咎于人工智能,而更倾向于将人确定为犯罪者——负有责任的主要行为人,如使用者、监督者或者生产者”,(19)M.Dobrinoiu,“The influence of artificial intelligence on criminal liability”,Lex ET Scientia International Journal, Vol.26,No.1,2019,pp.140-156.因为秉持着“人类中心主义”的立场,“所有由人创造的物体仍然被合理地视为财产类型、犯罪目标”,(20)O.E.Radutniy,“Criminal liability of the artificial intelligence”,Problems of Legality, Vol.138,2017,pp.132-141.而不是行为主体。由此,无人驾驶汽车也就无法作为“驾驶人”承担交通肇事的刑事责任。而且,无人驾驶的研发者、生产者也不具有承担交通肇事刑事责任的先决条件,“无人驾驶将根据算法对周围地区的观测结果自主地采取行动,因此,生产者对无人驾驶的作为或不作为就不再负有责任,除非他能够预见并避免无人驾驶的有害行为,但这样的预见实际上几乎是不可能的”。(21)T.Zapusek,“Artificial intelligence in medicine and confidentiality of data”.质言之,交通肇事刑事责任体系根本难以“迁移”到无人驾驶交通事故的刑事评价之中。从某种程度上说,“法益只能维系于该自动驾驶的安全性”。(22)杨宁:《自动驾驶与刑法研究的新展开》,《人民法治》2018年第6期。如此一来,无人驾驶交通事故的刑事评价只能围绕无人驾驶汽车的产品安全展开,而产品刑事责任就将成为主导的责任类型。
第二,无人驾驶汽车背靠人工智能技术,具备强大的数据分析能力与运转速度,因此,其能避免大部分自然人所犯的交通过错(比如酒驾、超速、超载、疲劳驾驶等)。质言之,传统的交通风险样态将被大幅压缩,交通肇事罪的适用空间基本不复存在。但作为新兴的智能产品,“无论传感器和控制软件多么先进,由于严格的物理原因,无人驾驶汽车也会产生交通事故”,(23)S.Nyholm & J.Smids ,“The ethics of accident-algorithms for self-driving cars:An applied Trolley Problem?”,Ethical Theory and Moral Practice,Vol.11,No.5,2016,pp.1275-1289.例如在“在出现备份系统故障或传感器读数错误的情况下”。(24)K.Tranter,“The challenges of autonomous motor vehicles for Queensland Road and criminal laws”,QUT Law Review, Vol.16,No.2,2016,pp.59-81.况且,就目前的技术状况而言,无人驾驶汽车出现不稳定的“非必要系统行为”(unwanted system behaviors)的潜在因素也远甚于普通机动车,(25)翁岳暄、多尼米克·希伦布兰德:《汽车智能化的道路:智能汽车、自动驾驶汽车安全监管研究》。这就有很大可能会导致交通事故。因而,作为技术承载的产品刑事责任自然也将成为居于主导地位的责任类型。
第三,在无人驾驶阶段,作为交通肇事罪前置法规范的交通运输管理法规早已经导入无人驾驶系统的算法中,“对交通法律法规的记忆及对自身驾驶行为合法性的辨认就成为无人驾驶车辆所必须具备的能力”。(26)程龙:《自动驾驶汽车交通肇事的刑法规制》,《学术交流》2018年第4期。也就是说,对交通运输管理法规的恪守已经转换为无人驾驶汽车的产品性能问题,由此,交通事故的刑事评价类型也就应当过渡到产品刑事责任的范畴。
(二)责任界限的划定:交通事故刑事评价的限度
1.风险的分担原则
确立风险的分担原则,其目的在于平衡技术生产(或研发)与责任负担的问题。实际上,无人驾驶交通事故中的结果归责很容易将责任主体拖入难以维系的境地,因为新兴技术的发展总是不可避免地伴随着法益侵害的危险。但是,基于无人驾驶所带来的巨大社会便利与收益,个人和社会绝无可能会抛弃无人驾驶。由此,就有必要以容许风险理论来确立风险的分担机制,从而合理地划定无人驾驶交通事故刑事评价的限度。
容许风险理论的法理依据在于:“人在生活当中的行为选择本来就是趋于利害衡平的考量,基于此一原则,在人类对于事情未来的发展没办法百分之百的预知及掌控的情况下,就必须要做合理的冒险,否则整体来看,反而会使得现实的生活受到更大的损害”。(27)黄荣坚:《刑罚的极限》,台北:元旦出版有限公司,1998年,第160页。其实,电力、矿业、铁路、航空、驾驶、医疗、运动竞技等现代产业或行为活动,都与人类生命、健康、财产等法益损害有所关联。如果依照传统过失理论,对行为人的危险行为所引起的结果追究刑事责任,那么社会生活将会陷入全面停摆的状态。正是这一理论脉络中,容许风险的法理为新过失论奠定了基础。
按照新过失论,容许风险理论的教义学意义就在于划定了一条风险承担的界线,逾越这道界线方有过失。(28)林东茂:《刑法综览》,北京:中国人民大学出版社,2009年,第133页。在实践效果上,这一方法论重新确定了注意义务的中心,即由结果预见义务转向结果回避义务。据此,在无人驾驶交通领域,就可以将“生产者虽预见危害结果但却无法避免危害结果的情形排除”,(29)刘宪权:《涉人工智能产品犯罪刑事责任的归属与性质认定》,《华东政法大学学报》2021年第1期。从而给予无人驾驶技术的发展以相对宽松的法律环境。从这一层面上讲,新过失论的真正特色,恰恰在于“重视行为的有用性,限定过失的范围”。(30)马克昌:《比较刑法原理》,武汉:武汉大学出版社,2002年,第232页。而容许风险理论中所要“容许的风险”,最终将由无人驾驶的最终受益者(即社会大众)所忍受和承担,即“将上述行为的危险部分地分配给了社会”。(31)黎宏:《日本刑法精义》,北京:法律出版社,2008年,第210页。
“新过失论将过失客观化,认为过失是‘懈怠’一定的回避措施,以不作为范式的构造来理解过失”。(32)[日]前田雅英:《刑法总论讲义》,曾文科译,北京:北京大学出版社,2017年,第181页。在“不作为”的具体判断上,结果回避义务借助社会相当性理论实现了行为标准的客观化。而在技术研发或生产领域,“一定的回避措施”实质上指向的就是产品的安全性标准。也就是说,在无人驾驶汽车符合当时(研发或生产时)的科技以及国家、行业所期待的安全性标准的情况下,仍然发生了交通事故,无人驾驶汽车的研发者或生产者将不再承担过失责任。(33)由于产品犯罪的特殊性质,如果是在事后发现存在产品缺陷而未能及时召回该无人驾驶汽车的情况下,就不再属于可以被“容许”的风险。
2.风险的分解原则
确立风险的分解原则,其目的在于平衡技术使用与责任负担的问题。无人驾驶是一种具有显著风险的人工智能技术,是基于对无人驾驶的完全信赖而使用的行为,也就成为了一种创设风险的行为。但是,如果对这种创设风险的行为进行客观归责,必然会引起消费者消极的“避责”心理,最终导致无人驾驶汽车市场的低迷与萎缩。因此,有必要延拓信赖原则理论在无人驾驶领域的适用,以分解无人驾驶汽车使用人的刑事责任。
信赖原则,是容许风险概念的延伸性原则。在新过失论者看来,信赖原则是限定注意义务的,即基于行为人最初可以依赖的不会发生结果的情状(尤其是他人的行为),行为人实施的行为导致结果发生的,就要因为没有注意义务而不能将结果归属于行为人。(34)张明楷:《外国刑法纲要》(第三版),北京:法律出版社,2021年,第210页。但是,应该注意到,信赖原则在机动车交通事故中的适用对象被限定在交通参与人,如行人、其他驾驶人员,信赖的内容是前述交通参与人能够遵守交通秩序。而在无人驾驶交通事故中,信赖原则的引入应当根据交通领域的重大变化进行一定的拓展,其适用对象相应地转变为无人驾驶汽车的使用人和无人驾驶汽车,信赖的内容则是无人驾驶的自主化驾驶能够遵守交通秩序。
信赖原则在无人驾驶交通事故中的适用基础,可以作出如下的阐释:一方面,无人驾驶的技术本质就在于将人类从驾驶中解放出来,“操作者既然知道车辆主要依靠自主行使,就有理由相信车辆的人工智能及其自主驾驶功能”,(35)彭文华:《自动驾驶车辆犯罪的注意义务》,《政治与法律》2018年第5期。如果不存在这种信赖,就等于彻底否定了无人驾驶存在的现实意义;另一方面,严格意义上说,无人驾驶汽车使用人只要按照使用规定操作,便是尽到注意义务。毕竟,一般用户难有能力察觉人工智能有无异状,只能信赖合法出厂的无人驾驶汽车;(36)王纪轩:《自主型人工智慧事故的刑事评价》,《高大法学论业》2021年第2期。由此可见,“信赖原则实质上已经带有强烈的规范责任分配意义”,(37)古承宗:《刑事交通事件中的容许风险与信赖原则》,《月旦法学杂志》2011年第6期。可以合理地限缩无人驾驶交通事故刑事评价的限度。这样,就可以将使用人从无人驾驶交通事故的刑事责任范围中剥离出来,从而打通了无人驾驶汽车进入市场的最后屏障。
综上所述,通过“产品责任的主导原则”,可以为无人驾驶交通事故中的刑事责任确定责任的性质,即其主导的责任类型应当是产品刑事责任;而通过“风险的分担原则”与“风险的分解原则”,可以为无人驾驶交通事故中的刑事责任划定责任的限度,前者要求在无人驾驶汽车符合当时的科技以及国家、行业所期待的安全性标准的情况下仍然发生交通事故的,应排除无人驾驶研发者或生产者的产品刑事责任,而后者则意味着无人驾驶汽车使用人被排斥在刑事责任范围之外。(38)这里无人驾驶汽车使用人的刑事责任是相对传统交通肇事罪中驾驶人的刑事责任而言的,并不意味着无人驾驶汽车使用人没有任何责任,笔者在后文“产品刑事责任的边界”部分中将对此作出论述。
三、无人驾驶交通事故中的刑事责任分配
明确了无人驾驶交通事故中的刑事责任范围,下一步需要着力解决的问题就将是刑事责任的具体分配问题。在此,笔者尝试通过“责任主体—罪责判断—责任边界”要素的层层限定,将无人驾驶交通事故中的刑事责任由大致的责任范围精确到具体的责任范畴,进而彻底消解其所面临的归责困境。
(一)产品刑事责任的主体
1.产品刑事责任的主体判定
无人驾驶交通事故中的刑事责任分配,需要首先明确其责任主体。但问题在于,是否有必要将无人驾驶汽车产业链上的各个环节都纳入产品刑事责任的归责主体,并在其中分配刑事责任?
如上所述,无人驾驶产品刑事责任的主体范围可以涵盖无人驾驶技术(系统)的研发者、零部件(硬件、软件)的供应者、无人驾驶汽车的生产者等整个产业链条中的组成部分。但笔者认为,无论是基于技术风险的控制还是刑事责任的归咎,都适宜将产品刑事责任全部分配给无人驾驶汽车生产商(者),使其成为刑事责任的“集成”者。
(1)技术风险的控制视角
无人驾驶交通事故中的刑事责任分配,其目的在于实现对人工智能技术的风险控制。而对于技术的风险控制而言,必然需要接受经济法则(成本法则)的约束,以寻求技术风险的最优化控制。笔者认为,无人驾驶汽车生产者具有技术风险的最优控制地位,应当将产品刑事责任向无人驾驶汽车生产者倾斜。理由在于:
第一,在无人驾驶的技术流程中,生产者最能有效地控制风险并平衡无人驾驶技术的收益与成本。(39)[德]霍斯特·艾丹米勒:《机器人的崛起与人类的法律》,李飞、敦小匣译,《法治现代化研究》2017年第4期。无人驾驶汽车生产者上承无人驾驶系统提供者(研发者),下接无人驾驶汽车的使用者,恰好处在了消化成本的最佳位置。申言之,它既可以通过无人驾驶技术的商用选择影响无人驾驶系统提供者(研发者)的技术方向,比如关系无人驾驶系统安全的“鲁棒性”(robust)(40)无人驾驶系统的“鲁棒性”,一般指无人驾驶汽车在发生故障时的容错性能,保证系统在超出常规频率发出指令、网络过载、算法实效等极端情况下,仍然能够正常(或降级)运作,直至完成可靠退出等,从而避免安全问题的发生。设计和“冗余性”(redundancy)(41)无人驾驶系统的“冗余性”,一般指为了系统的可用性,而采用两套或者两套以上的相同或相似且相对独立配置并可切换使用的设计。简言之,就是当一套系统出现问题时,另一套系统能够迅速切换,在不改变系统运行状态的条件下保障系统仍然可用。设计;也能够通过对无人驾驶汽车的定价等方式分散风险的负担,从而具备了控制技术风险的天然优越性;
第二,“无人驾驶技术作为实验室中的科研成果,几乎是无害的”,(42)姜涛、柏雪淳:《谁之责任与何种责任:人工智能的责任模式配置慎思》,《河南社会科学》2019年第4期。只有经由无人驾驶汽车生产者投入生产,技术风险才会真正地转化为现实的刑事风险。因此,由无人驾驶汽车生产者承担刑事责任,可以敦促其充分履行产品的注意义务与管理职责,进而最大可能地避免技术风险的现实化;
第三,有论者认为,“追究人工智能产品缺陷产品研发者的刑事责任能够引导人工智能技术的健康发展”,(43)刘宪权:《人工智能时代技术风险的刑法应对》,《华东政法大学学报》2018年第5期。但归根结底,无人驾驶技术的商用是自由市场经济的选择,利用市场的“优势劣汰”就足以调控无人驾驶的技术研发。进言之,刑事治理的重点不应在于无人驾驶技术的研发者,而在于拥有技术选择优势地位的生产者。况且,新技术、新发明总是建立在不断试错的基础上,对无人驾驶技术研发者动辄课以刑责,势必会“消耗”研发者的研发热情,进而阻遏人工智能转变为新一轮产业变革核心驱动力的技术裂变进度。
(2)刑事责任的归咎视角
对无人驾驶交通事故中的刑事责任分配而言,试图细致周延地考察、分配无人驾驶汽车产业链中各个环节的刑事责任并不现实。笔者认为,从有利于刑事责任归咎的立场出发,应当明确由无人驾驶汽车的生产者作为产品刑事责任的“集成”者。理由在于:
第一,在责任分配机制的设计上,我们往往追求这种多重义务的设置,其基本理念就是——有越多的人当保证人,出事的风险就越低,因此,就要尽量让每一个人都承担避免损害发生的义务。比如,有学者指出,“刑法应介入对无人驾驶的技术研发、生产制造、系统运营、现实使用等环节,从而实现刑法的全方位调控”,(44)赵秉志、詹奇玮:《现实挑战与未来展望:关于人工智能的刑法学思考》,《暨南学报》2019年第1期。相应地,产品刑事责任也就要分散到每个具体的环节中。但是,这种原本旨在降低损害风险的多重义务设计,结果可能会适得其反,因为可以承担义务的人越多,就越有可能没有人会真的尽义务。(45)黄荣坚:《交通事故责任与容许信赖》,《月旦法学杂志》1999年第7期。质言之,越是追求多重义务主体,越有可能造成责任的“扯皮”与推脱。最后,就可能导致贝克在风险社会理论中所提出的“组织化的不负责任”的现象,即“没有人被认定为须承担责任”。(46)[英]珍妮·斯蒂尔:《风险与法律理论》,韩永强译,北京:中国政法大学出版社,2012年,第54页。而且,当前无人驾驶汽车研发者与制造者的深度协作,实际上已经使责任很难被准确地分割。如果责任的追究需要回溯到每一个阶段查证责任的承担主体,也必将会耗费巨量的司法资源。因此,为了保证刑法的规制效率,有必要将无人驾驶汽车的产品刑事责任集中到无人驾驶汽车生产者中。
第二,有观点认为,“人工智能产品的设计和制造者的行为是更加前端的原因,这是导致危害结果的风险的最初来源”,(47)叶良芳、马路瑶:《风险社会视阈下人工智能犯罪的刑法应对》,《浙江学刊》2018年第6期。追究无人驾驶汽车研发者的产品刑事责任似乎更能达到预防效果。但是,无人驾驶汽车从研发到商用,中间横亘着生产者的技术测验与实路测试。换言之,生产者还具有对无人驾驶技术的查验和测试义务。这对于无人驾驶交通事故而言,研发者的产品缺陷与危害结果之间的因果关系就被“间接”化了。如此一来,将产品注意义务集中到生产者,并由其承担产品刑事责任也具有教义学上的根据。
第三,随同无人驾驶系统的所有权转移,无人驾驶系统内的结果回避义务也将转移给无人驾驶汽车生产者。进言之,在生产无人驾驶汽车时,其“有客观技术能力去避免制造导致该车辆违反交通运输管理法规、出厂时就有缺陷的自动驾驶系统”。(48)王德政:《人工智能时代的刑法关切:自动驾驶汽车造成的犯罪及其认定》,《重庆大学学报》2020年第3期。这样一来,原本应由无人驾驶研发者应承担的过失责任也就转移给了无人驾驶汽车生产者。从这一角度考量,由无人驾驶汽车生产者承担刑事责任并非是严苛之举。
概而言之,无人驾驶汽车生产者作为无人驾驶技术的集成者,将产品刑事责任向其倾斜与集中不仅可以节约整体技术风险的控制成本,还能最有效率地完成刑事责任的归咎问题。
2.产品刑事责任的承担模式
明确无人驾驶汽车生产者作为产品刑事责任的分配对象后,还需要继续论证该刑事责任的承担模式问题。换言之,无人驾驶生产者作为刑事责任主体,是一种个人责任的模式还是集体责任的模式,又或者集体责任与个人责任兼而有之。产品刑事责任的承担模式也涉及责任的分配与确定问题,因而需要在责任主体这一范畴内予以妥当地论证。
无人驾驶汽车生产者成为产品刑事责任主体,意味着所有有关无人驾驶汽车的注意义务都将由该生产者承担。但所谓的无人驾驶汽车生产者,其实也是一个生产流程的集合体,它的内部涉及汽车设计、制造、零部件安装、道路测试等诸多的参与者。如此一来,似乎还需要根据交通事故的发生原因继续在无人驾驶汽车生产者的内部寻找直接责任人员。相应地,也就应该由违反注意义务的具体个体(自然人)承担产品刑事责任。然而,这有可能导致的结果是:一方面,由于我国不承认共同过失犯罪,因此只能查证到具体参与者的过失责任,否则,就只能按照“存疑时有利于被告”的原则,不追究任何人的刑事责任;另一方面,在无人驾驶汽车生产分工愈来愈精细的情况下,每个可以究责的对象,都可能会是结果发生的原因,这样一来,责任会被切割而零碎化,责任主体也将会无限地扩大。
因此,无人驾驶汽车的产品刑事责任应当摒弃虽然精细但不实用的个人责任模式,而应当寻求法人责任(集体责任、单位责任)的模式。如此,就不再追究每个环节的执行是否有过失,而是“从整个组织结构的行为,去判断是否有因果、是否有监督过失,这不仅可以减轻检察机关的举证责任,还能有效地防止组织体犯罪”。(49)吴景钦:《无人车致人死亡刑事究责之疑难》,《台湾法学杂志》2019年第8期。
(二)产品刑事责任的罪责
1.产品犯罪的注意义务范围
产品犯罪的注意义务,直接指向的是生产者对无人驾驶汽车所应担保的安全程度。在新过失论的理论发展过程中,出现了“危惧感说”理论,试图将作为注意义务前提的预见可能性置换为不安感、危惧感,以此扩充注意义务的范围。但是,这种观点与我们通过“容许风险理论”和“信赖原则理论”限缩过失犯罪处罚范围的初衷相违背,会导致利益失衡的后果。况且,如果过分扩充注意义务范围,“生产者可能不愿意引进增加其责任的无人驾驶技术,或者可以对该技术定价,以收回其预期的责任成本,这可能导致比社会最优水平更高的价格和更低的技术采用率”。(50)J.Levy,“No need to reinvent the wheel:Why existing liability law does not need to be preemptively altered to cope with the debut of the driverless car”,Journal of Business,Entrepreneurship and the Law, Vol.9,No.2,2016,pp.355-388.为此,产品犯罪注意义务范围的合理界定,要综合无人驾驶汽车可能发生交通事故的机率以及损害程度,为生产者确立适当的注意义务范围。进言之,对这一注意义务的范围,要进行实质性的利益衡量,不能要求生产者避免所有可能发生的危险,而是“生产者必须致力于在可期待的范围内使其产品尽可能地安全”。(51)[德]Eric Hilgendorf:《自动驾驶与刑法——以“阿莎芬堡案”为例》,林信铭译,《高大法学论业》2019年第1期。在此基础上,按照交通事故发生的原因,可以将注意义务的范围确定为生产安全的防范义务与使用安全的防范义务。
生产安全的防范义务,实际上就是指无人驾驶汽车生产的安全性标准的要求。这一安全性标准,主要包括三方面的内容:其一,是指有关《产品质量法》等前置法规范对产品所提出的一般性的义务要求,指产品在当前技术水平下符合保障人体健康和人身、财产安全的国家标准、行业标准;其二,是由交通肇事罪的注意义务合理转化为产品犯罪的注意义务,即要求将“交通运输管理法规”“有关无人驾驶车辆的特别交通运输管理法规”等适法性的要求嵌入无人驾驶系统的算法中;其三,是将平等、公平、正义等伦理规则上升为刑法安全义务的,例如无人驾驶系统识别程序存在算法偏见,(52)陈洪兵、陈禹衡:《刑法领域的新挑战:人工智能的算法偏见》,《广西大学学报》(哲学社会科学版)2019年第5期。就可能影响无人驾驶汽车面临“电车难题”困境时的责任承担。
使用安全的防范义务,“人工智能产品的使用领域仍受生产者支配,这一点与普通产品存在本质区别”,(53)刘宪权:《涉人工智能产品犯罪刑事责任的归属与性质认定》。因而生产者在产品投入使用后对无人驾驶汽车的异常仍然具有一定的安全防范义务。这一使用安全的防范义务,主要包括两方面的内容:其一,是一般性的安全防范义务,比如产品故障的排除义务、产品缺陷的警告义务、产品缺陷的召回义务;其二,是专门针对无人驾驶系统的安全防范义务,比如对无人驾驶系统的及时更新与监督的义务,“虽然传统汽车和无人驾驶汽车的硬件可望在较长时间内保持相似,但后者本质上更依赖于系统(软件),只要无人驾驶车辆仍在流通,就需要保持更新”。(54)T.Liivak,“Liability of a manufacturer of fully autonomous and connected vehicles under the product liability directive”,International Comparative Jurisprudence, Vol.4,No.2,2018,pp.178-189.
2.产品刑事责任的罪责判断
在无人驾驶汽车生产者违背上述注意义务的情况下,就产生了产品刑事责任的罪责。但就罪责的具体判断而言,尤其是要证明产品犯罪注意义务的违反,却并非易事。笔者认为,无人驾驶生产者的罪责判断应当转变为相对严格责任的方式,即不要求起诉方证明被告人的主观过错,但被告人可以以无过失等理由来进行辩护。在此种情况下,并没有脱离主观责任的轨道,仅仅是证明责任的转移而已。(55)赵秉志:《英美刑法学》,北京:科学出版社,2010年,第63页。
第一,就无人驾驶交通事故而言,“无人驾驶汽车并没有事先设计固定的操作规制,而是允许汽车自主根据对数据的分析作出判断”,(56)江溯:《自动驾驶汽车对法律的挑战》,《中国法律评论》2018年第2期。如果不深入无人驾驶汽车的技术流程,很难直接判定生产者是否违背注意义务。因而,在无人驾驶汽车生产者的产品刑事责任上,适用相对的严格责任既是一种无奈之举,也是因应人工智能时代作出的现实调整。况且,无人驾驶汽车生产者完全可以根据其技术优势反证其已经充分地履行了产品的注意义务,从而排除其罪责。
第二,在智慧城市与智能交通的发展背景下,无人驾驶汽车生产者在国家统筹下协同运用智能化操作系统管控无人驾驶汽车的运行。这就意味着,无人驾驶汽车生产者掌控着大量的管控资源,既具有判断交通事故发生原因的技术优势,同时也具有掩盖事故真相的技术优势,因而,对其适用相对的严格责任也具有相当的必要性和可行性。
第三,交通事故属于公共安全的范畴,具有重大法益保护的特殊性,而且,无人驾驶汽车一旦推向市场也具有一定的扩散性、广泛性、不可控性等特征。因此,有必要通过相对的严格责任形成一定的倒逼机制,这不仅能够避免生产者在资本市场的推动下罔顾技术上的不成熟而过早地将无人驾驶汽车投放市场,也可以要求其不断改善其系统,并在技术上可行和合理的情况下监控和改进已上市的无人驾驶汽车,(57)潘俊良:《自驾车之发展与挑战——以德国法制为借鉴》,《科技法律透析》2018年第12期。从而达致对交通安全的最佳保护状态。
(三)产品刑事责任的边界
产品刑事责任的边界,即在产品刑事责任的主导之外,无人驾驶汽车交通事故中的其他责任类型。这些事由的存在,超出了无人驾驶汽车生产者的产品刑事责任范畴,应当由它们分别承担各自的刑事责任。
1.无人驾驶汽车使用人违反消极保证义务
对于无人驾驶汽车的使用人而言,虽然其角色经历了由驾驶者到乘客的实质“蜕变”,但其对无人驾驶汽车依然存在一定的消极保证义务。无人驾驶汽车使用人违反消极保证义务,如果妨害到驾驶行为的正常运转,就需要承担相应的刑事责任。
一则,无人驾驶汽车使用人不应当恶意干扰无人驾驶系统的操作,(58)黄波:《自动驾驶汽车交通肇事的刑法应对》。而使之处于可能失控的危险境地。例如,如果无人驾驶汽车使用人恶意干扰无人驾驶系统固定程序运行而导致危害后果的,应当由其承担相应的刑事责任。
二则,无人驾驶汽车使用人具有保养与维护的义务。如果使用人怠于履行无人驾驶汽车的保养义务或者在无人驾驶汽车发出维修警示时未能及时地进行维修,由此造成危害后果的,也应当由其承担相应的刑事责任。
三则,无人驾驶汽车使用人不能超出无人驾驶汽车的设计内容或者限制。虽然无人驾驶汽车能够根据道路情况实时作出决策调整,但安全引航到具体的目的地却是预先设定的,倘若无人驾驶汽车使用人在操作领域外强行设定地点(超出无人驾驶汽车使用的地理区域),由此造成的危害后果就应当由其承担相应的刑事责任。
2.第三方非法介入无人驾驶系统
第三方非法介入无人驾驶系统而导致交通事故时,无人驾驶汽车生产者不承担刑事责任,而转由第三方承担。
实际上,第三方对无人驾驶系统的非法介入,完全可以根据现行刑法理论中的抗辩事由进行分析。例如,第三方对无人驾驶系统算法的破坏,就可以“针对它的故障提出(类比于人类)精神错乱的辩护”。(59)G.Hallevy,“I,robot-I,criminal:When science fiction becomes reality:Legal liability of AI robots committing criminal offenses”,Syracuse Science & Technology Law Reporter,Vol.22,2010,pp.1-37.再如,“从安装间谍软件到第三方跟踪车辆的移动,到对车辆进行更直接的危险干扰,使其崩溃,或‘绑架’”,(60)K.Tranter,“The challenges of autonomous motor vehicles for Queensland Road and criminal laws”.可以类比于人类的胁迫行为。这些都能成为无人驾驶汽车生产者的免责事由,而转由具体的第三方承担相应的刑事责任。
当然,上述免责事由也可以根据因果关系的中断理论来解释。在第三方非法介入的情况下,驾驶行为与交通事故后果之间的因果关系被第三方的行为所中断,也可以得出无人驾驶汽车生产者免责的结论。
四、结语
世界四大国际会计师事务所之一的毕马威会计师事务所(KPMG)在2020年《自动驾驶汽车成熟度指数报告》(Autonomous Vehicles Readiness Index)中,用四项标准来衡量自动驾驶汽车成熟度指数,分别为“政策及立法”(policy and legislation)、“技术和创新”(technology and innovation)、“基础设施”(infrastructure)、“消费者可接受度”(consumer acceptance)。在这其中,排在最前位的即是“政策及立法”状况。这充分表明,人工智能的发展从来都不只是技术的竞争,同时也是法律环境的竞争。(61)吴英霞:《无人驾驶汽车规范发展法律路径研究》,《科技管理研究》2019年第2期。在自动驾驶的技术研发中,在2级、3级自动驾驶领域,我国仍然落后于西方国家,正因如此,提前化的归责设计是实现我们在4级、5级自动驾驶(无人驾驶)领域“弯道超车”的关键所在。
更进一步说,无人驾驶汽车作为人工智能技术周期演进过程中最被看好的领域之一,正是我们审视人工智能的绝佳入口。着眼于无人驾驶汽车之内,我们解决的是其交通事故中的刑事责任及其分配问题,超越于无人驾驶汽车之外,“有关无人驾驶汽车规制的立法能够为调整人工智能提供一个细小但十分有趣的样本,为预测未来法律将如何规制人工智能提供了一个途径”。(62)John Frank Weaver:《机器人也是人——人工智能时代的法律》,郑志锋译,台北:元照出版公司,2018年,第113页。这也是本文希望透过对无人驾驶交通事故中的刑事责任分配所作出的尝试。从这个意义上说,只有最大限度地通过责任机制的设计实现人工智能技术发展与社会安全保障之间的“帕累托最优”,才最有可能在未来的人工智能时代中掌握主动权。