自动化岸桥远程操作智能模拟系统设计与实现
2022-05-30张跃黄森海彭恒张果达王业海贾卫杰张钰洁宓超
张跃 黄森海 彭恒 张果达 王业海 贾卫杰 张钰洁 宓超
港机操作人员培训是港口作业正常开展的重要基础。传统的港机操作人员培训方式以实机操作训练为主,存在耗时较长、受天气影响较大、容易引发安全事故[1]和人力物力成本较高[2]等缺点,目前已逐渐被模拟操作训练与实机操作训练相结合的培训方式所取代。随着集装箱岸桥(以下简称“岸桥”)作业全面进入远程自动化时代[3],岸桥操作逐渐由现场操作转变为远程操作;但现有岸桥操作模拟器仍然采用岸桥司机室操作模拟形式[4-5],与真实场景下的自动化岸桥远程操作存在较大差异[6],难以满足自動化岸桥远程操作培训需求。为此,本文设计并实现自动化岸桥远程操作智能模拟系统,在不改变现有自动化岸桥控制系统硬件的条件下,将智能模拟系统软件嵌入远程操作台,通过打通智能模拟系统与自动化岸桥控制系统之间的数据链路,实现自动化岸桥的真实操作与模拟操作一键切换,从而不仅最大程度地在线还原自动化岸桥操作真实场景,满足实机操作训练需求,而且达到闲时培训、忙时作业的效果。
1 自动化岸桥远程操作智能模拟系统设计方案
1.1 系统架构
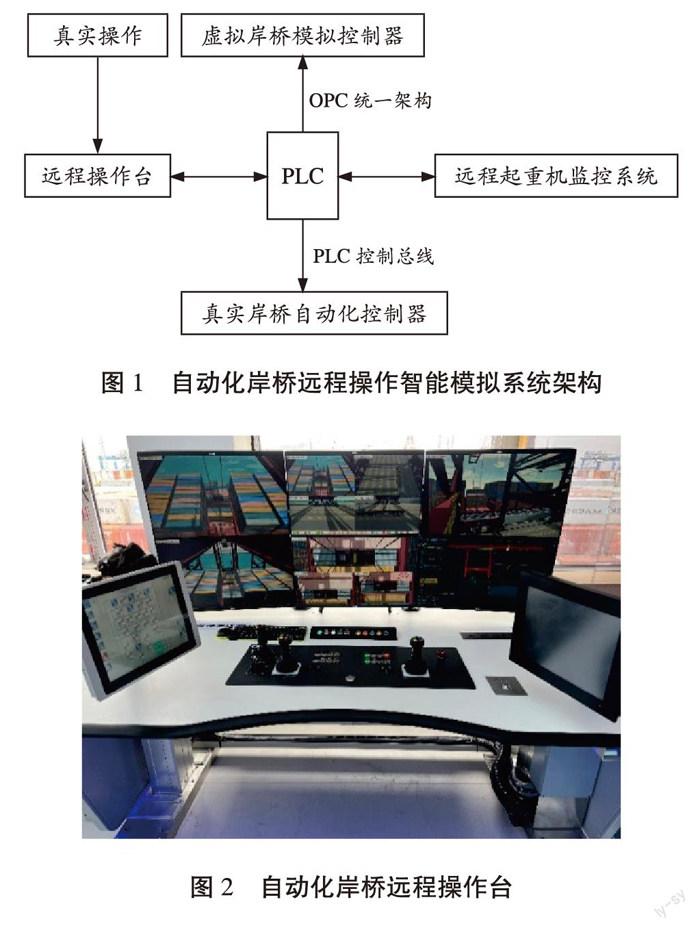
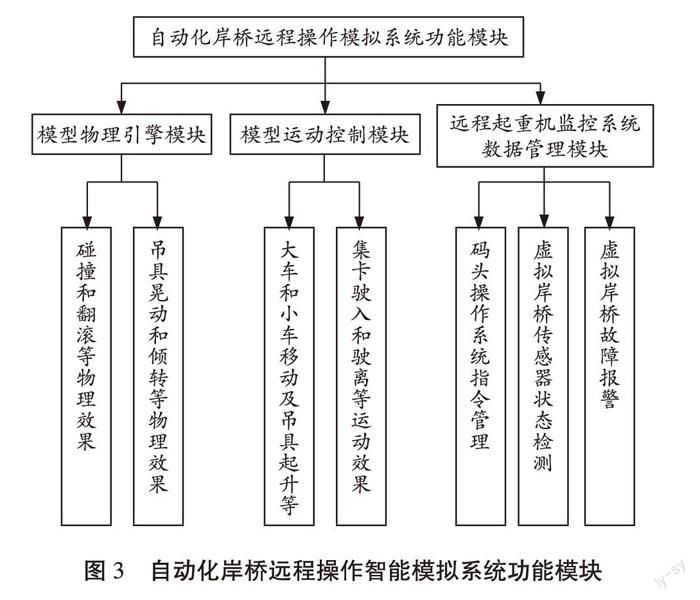
自动化岸桥远程操作智能模拟系统结合三维虚拟现实、数字化信息处理、机器视觉、软件工程、传感器、自动化控制和无线通信等技术,在借鉴现有岸桥操作模拟器技术的基础上,搭建与自动化岸桥通信的数据传输模块,并基于人工智能算法,通过集成大量虚拟传感器,实现对自动化岸桥操作数据的实时监控仿真,从而解决现有岸桥操作模拟器存在的操作数据真实性不足的问题。如图1所示,自动化岸桥远程操作智能模拟系统主要由远程操作台、可编程逻辑控制器(programmable logic controller,PLC)控制系统和港机控制器组成,其中:远程操作台作为信号输入端,提供手柄、按钮和触摸屏等控制信号,并采用6通道软件无缝拼接技术,实现与实机操作相同的视景屏幕显示(见图2);PLC控制系统采集到控制信号后,按照内部程序逻辑生成对应的机构驱动信号,并输出至港机控制器;港机控制器包括虚拟岸桥模拟控制器和真实岸桥自动化控制器,两种控制器分别基于面向过程控制的对象链接与嵌入(object linking and embedding for process control,OPC)统一架构通信协议和PLC控制总线通信协议,实现与PLC之间的双向通信,从而既能接收来自PLC的机构驱动信号,又能将虚拟岸桥或真实岸桥的状态和故障信号反馈给PLC,并且两种控制器可一键切换,从而满足自动化岸桥远程操作培训考核需求和实际作业需求。
1.2 系统原理
自动化岸桥远程操作智能模拟系统沿用岸桥实际作业使用的远程操作台,通过读取手柄和触摸屏信号控制岸桥作业,从而为操作人员提供高保真、高还原度的自动化岸桥远程操作体验。
收到手柄信号后,岸桥模型产生相应运动,虚拟传感器将感知到的岸桥模型位置等参数信息发送至外部PLC控制系统。模拟器采用安川PLC控制系统,并通过KEPServerEX OPC软件采集控制信号。输入信号通过编码器返回运行信息后,模拟器通过以太网获取信息并展示小车移动速度、吊具起升高度等实时工况。
远程起重机监控系统可对采集到的真实作业数据进行优化计算和集中显示。模拟器集成多种虚拟传感器,通过对获取的数据进行仿真拟合,模拟数据动态趋势,从而提高模拟器对实机操作的还原度。此外,通过监控模拟数据,可以整合分析操作人员的培训数据,据此调整培训方案。
自动化岸桥远程操作智能模拟系统参考真实的码头作业场景,利用三维建模软件显示三维视景,等比例还原现场作业情况。此外,系统拥有完备的三维场景数据库,并搭建模型资源子系统,从而满足多种规格集装箱装卸操作培训需求。
2 自动化岸桥远程操作智能模拟系统基本功能
自动化岸桥远程操作智能模拟系统功能模块包括模型物理引擎模块、模型运动控制模块和远程起重机监控系统数据管理模块(见图3)。
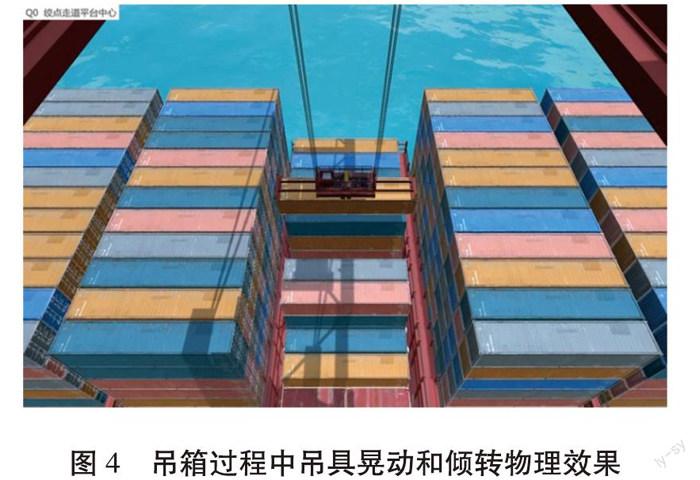
(1)模型物理引擎模块 自动化岸桥远程操作智能模拟系统采用实景三维仿真模型,根据码头多尺度、多模态时空数据进行实体化建模。在构建岸桥和集装箱船舶等运动模型时,按照刚体系统力学原理高度还原实际工况,基于真实世界中的岸桥运动规则确定参数,包括大车和小车质量、集装箱质量、运动机构摩擦力和各组件碰撞反应等,并通过高精度物理引擎呈现岸桥装卸作业过程中的大车和小车移动、吊具起升和变幅等运动(见图4)。
(2)模型运动控制模块 模型运动控制模块的主要作用是还原自动化岸桥装卸作业流程和相关运动机构的动作细节。在运动机构执行操作命令的过程中,PLC将点位数据通过OPC统一架构发送至系统,系统根据读取数据对机构实施运动控制,实现大车运动、小车运动以及集卡驶入、驶离等(见图5)。
(3)远程起重机监控系统数据管理模块 自动化岸桥远程操作智能模拟系统完整还原真实岸桥远程操作所用的远程起重机监控系统,并通过构建远程起重机监控系统数据管理模块,实现虚拟岸桥作业数据的可视化。该模块具备码头操作系统指令管理、虚拟岸桥传感器状态检测、虚拟岸桥故障报警等功能,可对岸桥状态实施在线编程、远程监控和故障诊断。
3 自动化岸桥远程操作智能模拟系统运行效果
从自动化岸桥远程操作智能模拟系统在宁波舟山港穿山港区集装箱码头的实际应用情况来看:该系统能够实现自动化岸桥模拟操作功能与实机操作功能的一键快速切换(见图6),达到闲时培训、忙时作业的效果,具有模拟效果和操作体验真实、改造成本和运行成本较低等优点。
参考文献:
[1] 钟瑞博. 集装箱岸桥困难装卸作业及其安全防控[J]. 集装箱化,2010,21(9):20-23.
[2] 潘洋,梁承姬,郑惠强. 基于人因的集装箱岸桥安全操作分析[J]. 中国安全科学学报,2012,22(10):65-71. DOI: 10. 16265/j.cnki.issn1003-3033.2012.10.006.
[3] 姚保良. 内贸码头常规岸桥远程操控技术实践与探索[J]. 中国新技术新产品,2021(11):30-32. DOI:10.13612/j.cnki. cntp.2021.11.010.
[4] 马乔林. 大屏幕集装箱装卸桥操作模拟器的研制[J]. 起重运输机械,2008(4):4-7.
[5] 天津港有限公司,交通运输部天津水运工程科学研究院. 装卸机械驾驶培训模拟装置应用[J]. 交通节能与环保,2014,10(4):6-12.
[6] 刘善平. 港口起重机械仿真训练模拟器的研究与应用[J]. 中国水运(下半月),2018,18(10):112-114.
(编辑:张敏 收稿日期:2022-06-03)
