海上风电四筒导管架基础下放过程试验研究
2022-05-30丁红岩李彦娥张浦阳乐丛欢
丁红岩,李彦娥,张浦阳,乐丛欢
海上风电四筒导管架基础下放过程试验研究
丁红岩1, 2,李彦娥2,张浦阳1, 2,乐丛欢2
(1. 天津大学水利工程仿真与安全国家重点实验室,天津 300072;2. 天津大学建筑工程学院,天津 300072)
筒型基础结构下水安装过程中,将经历筒裙入水、筒内气-水置换、筒顶完全入水直至入泥到设计深度的复杂施工过程.基础下放通过浪溅区时受到砰击荷载作用,可能出现吊缆过载断裂和松弛失效现象,且下放过程基础与缆绳耦合响应,影响基础稳性.采用筒内主动存储一部分气体的下放方式,不但可以有效控制自重入泥阶段,在水中下放时,可以有效降低缆绳吊力,明显增强筒型基础下放过程中姿态的控制能力.针对海上风电四筒导管架基础下放施工过程中气-水置换关键技术,考虑筒内主动憋气的下放安装施工方法,采用动态下放和稳态响应两种形式,研究波浪环境荷载下不同初始吃水工况下气垫响应机理、基础运动特性和吊缆张力响应规律,明确施工过程中吊缆的安全性能.研究表明:筒型基础憋气下放至顶盖完全淹没前,筒内气垫压力和气垫高度线性增长,不同初始吃水工况下筒内气垫压力增长速率相同;筒型基础顶盖完全淹没前筒内气垫高度线性增长,缆绳张力变化速率大于顶盖完全淹没后的阶段;基础通过浪溅区阶段时受到波浪砰击荷载作用,气垫结构对砰击荷载存在缓冲效应;气垫结构为基础提供浮力较大,且砰击荷载作用下基础受到向上的冲击力,通过分析吊缆动态放大因子和失效因子可知吊缆未出现过载和松弛失效现象.
四筒导管架基础;主动憋气;气垫;砰击荷载;松弛失效
能源结构的调整推动着风电技术的发展,海上风电凭借着丰富、优质的资源优势受到广泛关注并呈现由近海向较深海域的开发趋势.技术进步和大规模开发将驱动海上风电成本明显下降.预计到2030年,海上风电将普遍实现平价上网,度电成本将比目前下降40%左右,具备较强的市场竞争力[1-2].伴随着装机规划整体上调,我国风电开发正在由近海逐步走向50m左右水深的深海,而漂浮式风机成本仍然太高,吸力式筒型基础成了极具潜力的基础结构之一.筒型基础在我国海上风电领域的应用方兴未艾[3-4],在大连庄河海域、江苏响水、大丰和如东海域、广东阳江海域和广东汕尾后湖海域等风电场都开展了工程应用[5-6].
吸力筒式导管架基础运输-起吊-沉贯施工可达到2天/台,施工快速[7];相比于打入桩式导管架基础,用钢量省,无打桩震动,环境影响小,可完全拆 卸[8].2020年8月,国内首台海冰地区四筒吸力筒导管架风机基础及国内首台吸力筒风机基础在华能庄河海上风电场成功安装[9];国内首台三筒吸力筒导管架风机基础在广东省阳江市阳西沙扒300MW海上风电项目顺利安装[10].2021年,全球已实施水深最深、高度最高、吸力桩最长导管架风机基础在长乐外海C区完成[11].
随着水深逐步增大,海上风电筒型基础起吊下水施工过程中所形成的动态复杂系统将逐步在施工决策和过程控制中起到主导作用.本文针对多筒型导管架基础下放安装过程中的筒内气-水置换技术,采用筒内主动存储部分气体的下放施工方法:多筒型导管架基础筒顶预留排气/水开口,初始进入浪溅区保持排气状态,中后期关闭预留口阀门,筒内主动憋气下放.目前国内海上风电复合筒型基础和多筒型导管架基础多采用此种下放安装方法.
筒型基础下放过程中筒内滞留气体,形成气垫结构,下放过程涉及基础与海洋波浪环境的相互作用、气垫与水塞界面转化问题、气-水耦合弹簧动力响应问题.Thiagarajan等[12]通过小体积实浮体和气浮结构的对比,发现气浮结构的纵摇运动响应较大. Ikoma等[13]验证了气浮结构可有效减小波浪拖曳力,进而减小波浪荷载引起的基础运动响应.文献[14-16]针对复合筒型基础研究气浮结构对其运动响应和水动力特性的影响.文献[17-18]对气浮结构在不同工况下的沉降过程进行理论计算,并对结构振荡的稳定性进行分析.下放通过浪溅区阶段时,在波浪荷载作用下基础受到砰击荷载作用,产生较大的向上作用力,吊缆可能出现松弛失效现象,且下放过程基础与吊缆耦合运动.Næss等[19]以四筒基础为研究对象,对筒型基础施加不同幅度的周期荷载,通过试验分析、CFD方法和Simo数值模拟对比分析筒型基础下放通过浪溅区过程基础的运动响应,并对吊缆张力动态放大因子进行校核.Verhagen[20]研究表明结构物在水中发生砰击荷载作用时,当水面和砰击结构物之间形成气垫结构时,产生明显缓冲效应使得冲击作用减弱.目前,对海上风电多筒导管架基础的研究很少,魏宇墨[21]基于三筒导管架基础研究初始存气量对下放过程中基础固有频率及运动响应的影响.本文基于海上风电四筒导管架基础,开展筒内主动憋气下放安装模型试验,采用动态下放和稳态响应两种方法,探究筒型基础在不同初始吃水工况下放过程中筒内气垫响应、气-水置换机理、基础运动响应特性和吊缆张力变化规律.
1 试验模型设计
1.1 憋气下放理论分析

根据牛顿第二定律,可以得到如下的气浮筒型基础受力平衡方程式:

憋气下放过程气垫结构相对于基础是上升的.假设结构下放距离为d,基础吃水增加d,筒内气体高度随吃水增加而减小,假设减小高度为d,为气垫的压缩系数(随着吃水的变化而变化).对于理想气体,根据玻意耳-马略特定律:11=22.基础下放过程中,筒内液面横截面积保持不变.
外部静水面到筒顶盖距离为f,内部水面到外部水面的距离为w,初始气压为1,基础下放d高度时内部气压为2,则有


采用d=0处的泰勒展开,得到

1.2 试验设计
本次试验以海上风电四筒导管架基础为研究对象,模型试验设计时需要满足几何相似、运动相似和动力相似[22],模型相似比为1∶45.导管架采用不锈钢材料,筒型基础采用有机玻璃材料制作.筒型基础原型筒径10m,筒高20m,筒间距30m;导管架基础原型高度60.5m.水深40.5m.图1为四筒导管架基础模型.表1为四筒导管架基础原型和模型基本参数对比.
图2为四筒导管架基础模型及传感器布置.在筒型基础各筒顶盖开4个孔径10mm的圆孔,其中,一个圆孔通过气阀和软管与气压力传感器相接,并接入动态采集系统,测量多筒导管架基础下放过程中筒内气压;其他3个圆孔通过气阀和软管与总通气排相连,控制下放过程筒顶开孔,总管处设置稳定的双向流气泵为基础提供稳定的气压力.为监测下放过程不同时刻基础六自由度运动响应,在基础重心位置处布置一个陀螺仪,并在导管架顶部连接件处布置一个激光位移计.在导管架与每个吊缆连接处均布置一个拉力传感器测量吊缆张力.整体基础通过由电机控制的可上下收放的蜗轮蜗杆实现基础下放和起吊操作,电机速度由变速控制箱控制,变速控制箱采用数字化控制模式.陀螺仪采样频率为100Hz,其他传感器采样频率均为50Hz.试验前采用波高仪根据水深条件和试验室造波设备进行滤波准备.
本试验四筒导管架基础下放时筒顶预留排气/水开口,初始进入浪溅区保持排气状态,中后期关闭预留口阀门,筒内主动憋气下放.随着筒裙吃水深度的增加,水压增加导致气体压缩,不断压缩的气体排开水体积逐渐变小,但筒内气/液面比筒外水线面偏低,始终存在的浮力随下放深度增加呈现非线性降低的变化特性.
表1 四筒导管架基础基本参数
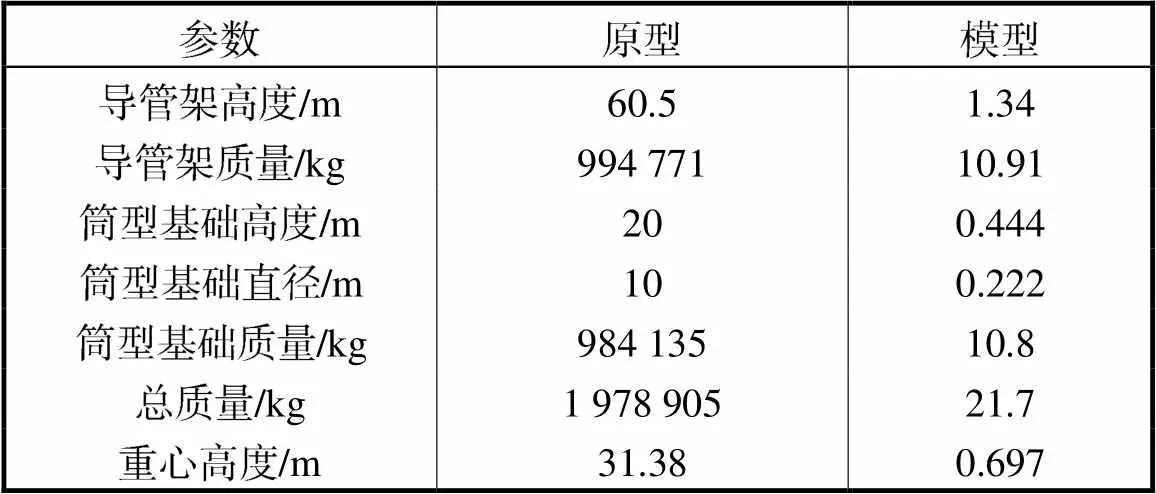
Tab.1 Main parameters of the four-bucket jacket foun-dation
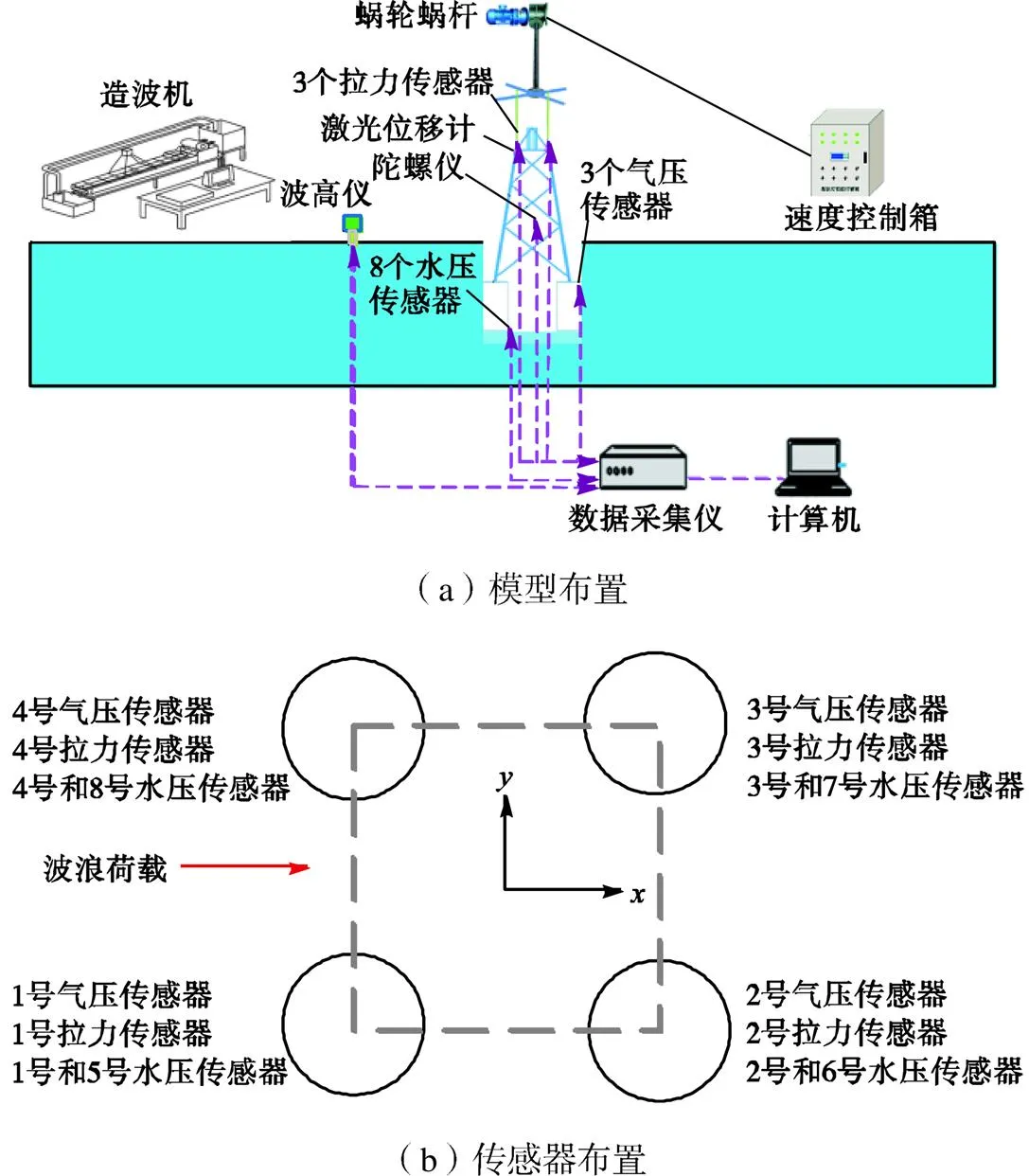
图2 模型及传感器布置
2 试验工况
海上风电四筒导管架基础下放过程中下放速度很小,不同下放位置处基础稳态运动响应可反映连续下放过程中基础的运动响应特性.通常可以采用两种方法模拟[23-24]:①动态下放法,模拟基础连续动态下放过程基础响应特性;②稳态响应法,模拟基础在不同典型吃水深度位置处的稳态响应.
动态下放法模拟时针对筒内气、水占比情况,研究不同初始吃水工况施工过程中筒内气垫效应,分析下放过程姿态控制模式.下放时筒顶预留排气/水开口,初始进入浪溅区保持排气状态,中后期关闭预留口阀门,筒内主动憋气下放.图3为四筒导管架基础憋气下放过程.基础下放从设计吃水位置至顶盖完全淹没后停止下放,初始下放时刻筒内外液位平齐.采集时大气压力设置为0.不同吃水下放时下放速度均为16cm/min,水深0.9m.有义波高2.22cm,谱峰周期1.118s.表2为试验工况的主要条件参数.
稳态响应模拟时假设初始吃水0.35m,初始状态筒内外液位平齐,在此状态下分别下放至吃水0.41m、0.44m(顶盖入水)、0.50m和0.60m位置.水深0.9m,波浪选用Jonswap谱,有义波高2.22cm,谱峰周期1.118s.采集时初始大气压力设置为0.

图3 四筒导管架基础憋气下放过程
表2 试验工况条件参数

Tab.2 Condition parameters of the experiment cases
3 试验结果与分析
3.1 动态下放
本节研究不同初始吃水工况下四筒导管架基础憋气下放过程中基础运动响应及受力特性.图4(a)为四筒导管架基础不同初始吃水工况憋气下放时1号筒内气压时程曲线.由于筒顶阀门关闭,筒内气体无法逸出,筒内气体积聚,形成气垫结构;随着下放深度增大,气垫压力基本呈线性增长趋势,不同吃水工况下筒内气垫压力增长速率相同.图中显示了不同吃水深度顶盖淹没时刻的气压值,初始吃水0.35~0.41m工况顶盖入水时筒内气压分别为853Pa、657Pa、478Pa和291Pa.图4(b)为不同吃水工况下放顶盖淹没时刻筒内气压振荡幅值.可以看出,随着初始吃水深度增大,顶盖淹没时气压振荡幅值逐渐增大.这是由于初始吃水增大,顶盖淹没时筒内气垫压力减小,对基础筒内液面振荡缓冲效应减弱.

图4 不同吃水工况下1号筒内气压
图5(a)为四筒导管架基础在不同工况憋气下放过程中1号缆绳的张力时程曲线.图5(b)为基础淹没阶段缆绳张力运动响应统计特征值.缆绳张力由重力、基础浮力和气垫浮力平衡,初始下放阶段,由于筒内气垫压力和筒壁排水体积均呈线性增长,因此缆绳张力呈线性减小趋势.顶盖淹没阶段,筒外液面对顶盖产生砰击荷载,因而缆绳张力动力响应增大.随着初始吃水深度增加,顶盖淹没阶段筒内气垫体积减小,对基础振荡缓冲效应减弱,进而缆绳张力振荡幅度增大.
图6为四筒导管架基础在不同工况憋气下放过程中基础纵摇和垂荡加速度响应时程曲线.顶盖淹没前,缆绳张力较大,缆绳恢复力刚度较大,因此基础纵摇和垂荡运动响应均较小;顶盖淹没阶段,缆绳恢复力减小,且顶盖在波浪荷载作用下受到砰击荷载作用,进而基础纵摇和垂荡运动响应均增加.图7为顶盖淹没前后基础纵摇运动响应统计值.随着初始吃水深度增大,顶盖入水阶段筒内气压减小,对基础运动缓冲效应减弱,但是筒内气体体积较大时在气弹簧和水弹簧耦合下基础整体刚度较小,不同因素综合影响下初始吃水0.39m工况下基础纵摇运动响应 最大.
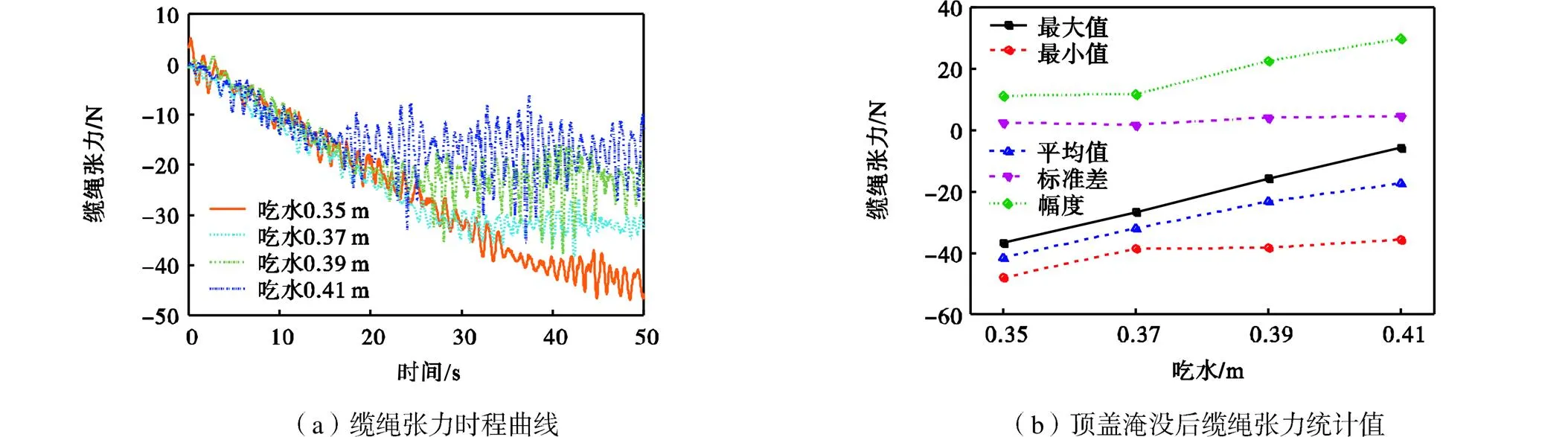
图5 不同吃水工况下1号缆绳张力

图6 不同吃水工况下基础纵摇和垂荡加速度时程曲线

图7 纵摇统计值
图8为在初始吃水0.37m工况下不同筒体气压和缆绳张力响应时程曲线.由于波浪的相位差很小,下放过程中不同筒体受力状态及受力时间存在差异.根据基础布置示意,1号和4号、2号和3号筒体在波浪传递方向坐标位置相同,因此1号和4号、2号和3号筒体气压响应基本一致;1号和4号筒型基础发生砰击荷载作用的时间在2号和3号之前.

图8 吃水0.37m工况下不同筒体气压和缆绳张力时程曲线
3.2 稳态响应
为确保四筒导管架基础安装下放施工的安全性,基础下放速度非常缓慢,因此基础不同下放高度位置处稳态响应的研究同样可以反映基础连续下放过程中的动态响应.本节研究基础下放过程中在不同典型下放高度处基础响应特性及缆绳受力变化规律.
图9为四筒导管架基础在不同下放深度时1号气压时程曲线和统计值.吃水0.35m时,筒内气压基本保持为0,随着吃水深度增大,由于筒内气体无法逸出,因此筒内气体积聚,气垫压力增大.顶盖淹没前,由于试验时气体压力无法缩尺,气体变化引起的响应效果较小,基础运动响应幅度相差无几.吃水0.50m时,基础在波浪荷载作用下处于“入水-出水-入水”往复运动状态,筒内外液面对筒型基础顶盖产生砰击荷载,且缆绳恢复力刚度减小,因此筒内气压起伏运动响应增大.
图10为四筒导管架基础在不同下放深度时1号缆绳张力时程曲线和统计值.顶盖淹没前,筒内气垫和筒裙提供浮力增大,缆绳张力平均值减小;顶盖淹没后,筒内气垫受到水压作用,气垫提供浮力基本不变,导管架提供浮力较小,缆绳张力平均值变化较小.顶盖淹没前,由于筒内气垫压力增大和缆绳刚度减小引起的基础动态响应效果基本平衡,因此基础在不同吃水下运动响应幅度基本保持不变;吃水0.50m时,基础在波浪荷载作用下出现“入水-出水-入水”往复现象,筒外液面对筒型基础顶盖产生砰击荷载,基础运动响应幅度大,缆绳张力响应增大;吃水0.60m时,基础顶盖不受波浪砰击荷载作用,缆绳张力动态响应减小.

图9 不同下放位置处1号筒内气压

(a)缆绳张力时程曲线
(b)缆绳张力统计值
图10 不同下放位置处1号缆绳张力
Fig.10 Tension of the No.1 sling at different lowering po-sitions
图11为四筒导管架基础在不同下放深度时基础纵摇响应统计值和频谱图.四筒导管架基础下放安装过程基础运动响应较小.吃水0.5m时.筒外液面对基础产生砰击作用,基础纵摇运动响应较大.顶盖入水后,筒内水塞占比增大,水塞附加质量增大,基础纵摇运动受到波浪荷载诱导作用大于基础纵摇共振频率.基础吃水从0.35m增长至0.60m时基础纵摇固有频率分别为0.23Hz、0.20Hz、017Hz、0.10Hz、0.14Hz.随着吃水深度增大,筒内气垫高度增大,气弹簧和水弹簧耦合刚度减小,因此基础固有频率减小;随着吃水深度继续增大,水压增大,对筒内气垫压缩增大,筒内气体体积减小,气弹簧和水弹簧耦合后的刚度增大,因而基础纵摇固有频率出现增大趋势.

图11 纵摇统计值和频谱图
图12为四筒导管架基础在不同下放深度时基础垂荡加速度响应频谱图.可以看出.顶盖入水后,基础垂荡运动受到波浪频率的诱导作用小于基础垂荡共振频率.基础吃水从0.35m增长至0.60m时基础垂荡固有频率分别为1.64Hz、1.61Hz、1.49Hz、2.0Hz、1.98Hz.顶盖淹没后基础垂荡固有频率大于顶盖淹没前.

图12 垂荡加速度响应频谱图
3.3 气垫高度和吊缆张力
四筒导管架基础下放过程中,缆绳张力=基础自重-基础自身浮力-气垫浮力,气垫高度由试验测得的缆绳张力与基础自重及浮力计算得到;同时,试验时通过气压传感器测得的筒内气压值采用=公式可计算得到气垫高度值.图13为四筒导管架基础在不同初始吃水深度下憋气下放时筒内气垫高度和通过气压换算得到的气垫高度对比.筒型基础憋气下放过程中,筒内气体无法排出,随着下放深度增大,筒内气体受到压缩,且基础下放是通过电机控制匀速下放,因此憋气下放筒内气垫压力呈线性增长趋势.顶盖淹没前,气垫未受到向下的压缩力,气垫高度增长速率与筒内气压增长速率相同;顶盖淹没初始阶段,基础顶盖处于“入水-出水-入水”状态,筒内气垫仍保持线性增长.随着初始吃水深度增大,同一下放深度筒内气垫压力减小,筒内气垫对水塞运动缓冲效果减弱.
图14为四筒导管架基础憋气下放至顶盖淹没阶段时筒内气垫高度最大值对比.憋气下放时由于顶盖淹没前筒内气垫高度呈线性增长,且随吃水深度等差减小,因此不同初始吃水工况时下放至顶盖淹没时筒内气垫高度随初始吃水呈线性减小趋势.
四筒导管架基础下放过程中在波浪荷载作用下基础和吊缆耦合作用,缆绳张力过大时,可能导致下放过程中缆绳过载断裂;缆绳张力过小时可能发生缆绳松弛失效现象.因此,下放过程缆绳张力应控制在一定范围内.
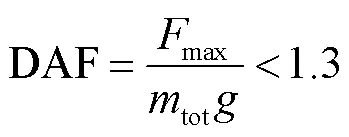
DNV规范[25]规定:三筒导管架基础下放安装过程中最大允许动态载荷应低于起重机、结构和起重设备的动态载荷.DNV规范引入动态放大因子DAF值判定下放过程中缆绳张力动态响应是否满足最大允许动态荷载.DAF值为缆绳最大张力与初始状态基

图13 不同初始吃水时筒内气垫高度

图14 气垫高度最大值对比
础重力的比值.根据DNV规范规定,DAF值应始终小于1.3[25-26].
基础安装过程中受到砰击荷载或缆绳共振响应的影响,导致缆绳松弛失效,失去承载能力,为确保基础下放安装过程的安全和稳定性,DNV规范为 避免缆绳松弛失效,要求基础下放过程应满足以下 规定[25-26]:


图15为四筒导管架基础在憋气下放安装过程中的缆绳张力DAF值对比.由于初始下放阶段缆绳张力最大,而顶盖淹没阶段基础顶盖受到砰击荷载作用,因此本节对比包括初始下放阶段和顶盖淹没阶段.可以看出不同阶段缆绳张力DAF值均小于1.2,满足设计要求.顶盖淹没阶段由于气垫结构提供浮力,缆绳张力均值减小,因此顶盖淹没阶段缆绳张力DAF值小于初始阶段.顶盖淹没阶段基础顶盖受到砰击荷载作用,但筒内气垫高度较大,对基础砰击荷载产生缓冲作用,因而缆绳张力DAF值较小.初始阶段,筒内未形成气垫结构,随着初始吃水深度增大,筒内气垫体积增大,气垫结构提供浮力增大,缆绳张力DAF值减小;顶盖淹没阶段,随着初始吃水深度增大,筒内气垫体积减小,发生砰击现象时的缓冲效果减弱,缆绳张力DAF值增大.

图15 DAF值
图16为四筒导管架基础缆绳张力失效因子对比.可以看出不同工况下缆绳张力失效因子均小于0.8,满足设计要求.顶盖淹没阶段筒内气垫对基础的砰击作用有一定缓冲效应,缆绳失效因子较小;且随着吃水增大,气垫对筒型基础缓冲效果减弱,进而缆绳失效因子增大.

图16 缆绳张力失效因子对比
4 结 语
本文基于四筒导管架基础筒内主动憋气的下放安装施工方法,开展动态下放和稳态响应物理模型试验,研究基础下放安装过程中气垫响应、基础运动特性和吊缆张力变化规律.主要结论如下.
(1) 四筒导管架基础憋气下放顶盖淹没前筒内气垫压力和缆绳张力均呈线性变化,不同初始吃水工况气垫压力增长速率相同;顶盖淹没阶段,筒顶受到波浪砰击荷载作用,基础响应幅度较大,气垫结构对砰击荷载有一定缓冲作用.
(2) 分析不同下放高度处基础稳态响应,可知当顶盖淹没一定深度,波浪荷载下顶盖仍处于“入水-出水-入水”状态时基础受到砰击荷载作用,基础运动响应最大.
(3) 四筒导管架基础下放至顶盖完全淹没前筒内气垫高度线性增长,气垫结构为基础提供较大浮力,同时波浪荷载作用下基础通过浪溅区时受到砰击荷载作用,产生向上冲击力,通过计算吊缆张力失效因子,明确吊缆未出现松弛失效现象,同时吊缆张力DAF值满足要求,吊缆未出现过载断裂现象.
[1] Perveen R,Kishor N,Mohanty S. Offshore wind farm development:Present status and challenges[J]. Renew Sustain Energy Reviews,2014,29:780-792.
[2] 刘 超,徐 跃. 后疫情时代我国海上风电发展对策探究[J]. 中外能源,2021,26(3):14-19.
Liu Chao,Xu Yue. Research on development strategy of China’s offshore wind power after COVID-19[J]. Sino-Global Energy,2021,26(3):14-19(in Chinese).
[3] Zhang P Y,Ding H Y,Le C H. Motion analysis on integrated transportation technique for offshore wind tur-bines[J]. Journal of Renewable and Sustainable Energy,2013,5(5):1567-1578.
[4] Ding H Y,Hu R Q,Zhang P Y,et al. Load bearing behaviors of composite bucket foundations for offshore wind turbines on layered soil under combined loading[J]. Ocean Engineering,2020,198:106997.
[5] Liu Y G,Guo Y H,Ding H Y. Failure envelopes of wide-shallow composite bucket foundation for offshore wind turbines in silty sand[J]. Transactions of Tianjin University,2018,24(2):182-190.
[6] Zhang P Y,Li Y,Lü Y J. Bearing capacity characteris-tics of composite bucket foundation under torque loading[J]. Energies,2019,12(13):2487-2504.
[7] 郑庆弟,林志庞,侯林高. 海上风电吸力桩型导管架基础施工关键技术研究[J]. 河南电力,2019(4):35-42.
Zheng Qingdi,Lin Zhipang,Hou Lingao. Study on key technology of offshore wind turbine suction pile jacket foundation construction[J]. Henan Electric Power,2019(4):35-42(in Chinese).
[8] 乐丛欢,任建宇,姜明涛,等. 砂土中四筒导管架风机基础抗弯承载力研究[J]. 海洋工程,2021,39(2):12-19.
Le Conghuan,Ren Jianyu,Jiang Mingtao,et al. Analysis of the moment bearing capacity of four-bucket jacket foundation in sandy soil[J]. The Ocean Engineering,2021,39(2):12-19(in Chinese).
[9] 新起点,新征程│华能庄河海上风电:等风来,“东线”北点战犹酣[EB/OL]. http://www.xinhuanet.com/ power/2021-01/14/c_1210979326.htm,2021-01-14.
New Departure,New Journey│Huaneng Zhuanghe Off-shore Wind Turbine:Waiting for the Wind to Come,the Battle at the North Point of the“Eastern Route”is Still in Full Swing[EB/OL]. http://www.xinhuanet.com/ power/2021-01/14/c_1210979326.htm,2021-01-14(in Chinese).
[10] 陈婷婷. 国内首个吸力筒导管架风机基础海上安装在阳江完成[N/OL]. https://www.gzdaily.cn/amucsite/web/ index.html#/detail/1344897,2020-08-11.
Chen Tingting. The Offshore Installation of the First Suc-tion Bucket Jacket Foundation of Domestic was Com-pleted in Yangjiang[N/OL]. https://www.gzdaily.cn/ amucsite/web/index.html#/detail/1344897,2020-08-11(in Chinese).
[11] 全球已实施水深最深、高度最高、吸力桩最长导管架风机基础沉贯[EB/OL]. https://news.bjx.com.cn/html/ 20210308/1140290.shtml,2021-03-08.
The Deepest Water Depth, Highest Height and Longest Suction Pile Jacket Foundation Penetration Has Been Implemented in the World[EB/OL]. https://news.bjx. com.cn/html/20210308/1140290.shtml,2021-03-08(in Chinese).
[12] Thiagarajan K,Morris T,Spargo A. Heave and pitch response of an offshore platform with air cushion support in shallow water[C]// Proc 23rd Intl Conf Offshore Mech and Arctic Eng. Vancouver,Canada,2004:817-823.
[13] Ikoma T,Kobayashi M,Masuda K,et al. A prediction method of hydroelastic motion of aircushion type floating structures considering with draft effect into hydrodynamic forces[C]// Asme International Conference on Offshore Mechanics & Arctic Engineering. Estoril,Portugal,2008:1-9.
[14] 丁红岩,石建超,张浦阳,等. 气浮筒型基础结构横荡及纵摇水动力系数研究[J]. 水动力学研究与进展,2015,30(5):516-525.
Ding Hongyan,Shi Jianchao,Zhang Puyang,et al. Study on swaying and pitching hydrodynamic coefficient of air-floating bucket foundation[J]. Chinese Journal of Hydrodynamics,2015,30(5):516-525(in Chinese).
[15] Zhang P Y,Ding H Y,Le C H,et al. Towing characteristics of large-scale composite bucket foundation for offshore wind turbines[J]. Journal of Southeast University(English Edition),2013,29(3):300-304.
[16] Ding H Y,Lian J J,Li A D,et al. One-step-installation of offshore wind turbine on large-scale bucket-top-bearing bucket foundation[J]. Transactions of Tianjin University,2013,19(3):188-194.
[17] 王传荣,徐 炯,沈国光. 气浮结构物的沉降过程分析[J]. 海洋工程,2003,5(2):23-26.
Wang Chuanrong,Xu Jiong,Shen Guoguang. Analysis on the falling of the air floating structure[J]. Ocean En-gineering,2003,5(2):23-26(in Chinese).
[18] 别社安,薛润泽,郭林林. 箱筒型基础结构及其气浮
拖运和定位下沉安装方法[J]. 港口科技,2019(3):12-17.
Bie She’an,Xue Runze,Guo Linlin. Box-bucket type foundation structure and its air floating hauling and positioning sinking installation method[J]. Science and Technology of Ports,2019(3):12-17(in Chinese).
[19] Næss T,Havn J,Solaas F. On the importance of slamming during installation of structures with large suction anchors[J]. Ocean Engineering,2014,89:99-112.
[20] Verhagen J H G. The impact of a flat plate on a water surface [J]. Ship Research,1967,11(4):211-223.
[21] 魏宇墨. 海上风电三筒导管架下放过程运动特性研究[D]. 天津:天津大学,2020.
Wei Yumo. Dynamic Characteristics Aanalysis of Offshore Wind Turbine Three-Bucket Jacket During Lowering Process[D]. Tianjin:Tianjin University,2020(in Chinese).
[22] 杨建民,肖龙飞,盛振邦. 海洋工程水动力学试验研究[M]. 上海:上海交通大学出版社. 2008.
Yang Jianmin,Xiao Longfei,Sheng Zhenbang. Experimental Study on Hydrodynamics of Offshore Engineering[M]. Shanghai:Shanghai Jiao Tong University Press,2008(in Chinese).
[23] Li L,Gao Z,Moan T. Response analysis of a nonstationary lowering operation for an offshore wind turbine monopile substructure[J]. Journal of Offshore Mechanics and Arctic Engineering,2015,137(5):051902.
[24] Li L,Gao Z,Moan T. Operability analysis of monopile lowering operation using different numerical approaches [J]. International Journal of Offshore and Polar Engineering,2016,26(2):88-99.
[25] DNV. Modelling and Analysis of Marine Operations[R]. Det Norske Veritas,2011.
[26] Doorn N. Environmental Limitations in Suction Bucket Based Jacket Foundation Installation,Using Vertical Lift-Off from a Jack-Up Vessel[D]. Delf:Delf University of Technology,2016.
Experimental Investigation of an Offshore Wind Turbine Four-Bucket JacketFoundation During Lowering Operation
Ding Hongyan1, 2,Li Yan’e2,Zhang Puyang1, 2,Le Conghuan2
(1. State Key Laboratory of Hydraulic Engineering Simulation and Safety,Tianjin University,Tianjin 300072,China;2. School of Civil Engineering,Tianjin University,Tianjin 300072,China)
The bucket foundation lowering operation will experience a complex construction process of the bucket skirt entry in water,air-water replacement inside the bucket,and the submerging of the roof to the mud. The lower-ing of the foundation through the splash zone is subjected to a slamming load,which may result in the occurrence of the sling tension overload fracture and slack failure phenomena. Moreover,the coupling response between the foun-dation and slings affects the stability of the foundation. The lowering method of actively storing part of the air within the bucket can not only effectively control the self-weight sinking but can also greatly reduce the lifting force during the lowering process. Meanwhile,it can significantly enhance the attitude control ability during the bucket foundation lowering process. Aiming at the air-water replacement technology in the lowering construction process for the four-bucket jacket foundation,the active suffocation lowering operation is considered. Two approaches of dynamic lower-ing process and steady-state response are adopted. The response mechanism of the air cushion,the movement charac-teristics of the foundation,and the response regularity of the sling for different initial draft cases are clarified. The safety performance of the sling during the construction process is also explicated. Test results show that the air cushion pressure and air cushion height increase linearly before the roof is completely submerged. The air pressure increase rate is the same for different initial draft cases. The air cushion height inside the bucket increases linearly before the bucket roof is completely submerged,and the various rate of sling tension is greater than that after the roof is com-pletely submerged. During the lowering of the foundation through the splash zone,the foundation is subjected to the wave slamming load,and the air cushion structure has a buffer effect on the slamming load. The air cushion provides evident buoyancy for the foundation,and the foundation is impacted upward by the slamming load. Analysis results of the dynamic amplification factor and failure factor reveal the absence of overload and slack failure.
four-bucket jacket foundation;active suffocation;air cushion;slamming load;slack failure
10.11784/tdxbz202107044
TK83
A
0493-2137(2022)08-0792-10
2021-07-30;
2021-09-03.
丁红岩(1963— ),男,博士,教授,dhy_td@163.com.Email:m_bigm@tju.edu.cn
张浦阳,zpy_td@163.com.
国家自然科学基金资助项目(51779171).
the National Natural Science Foundation of China(No. 51779171).
(责任编辑:樊素英)
