无人机机载激光雷达作业效率及精度提升方法研究
2022-05-28张钦文
唐 敏 张钦文
(中铁二院工程集团有限责任公司,成都 610031)
激光雷达是集激光扫描仪、全球定位系统、惯性导航系统于一体的空间测量系统。与其他遥感技术相比,激光雷达系统具有自动化程度高,受天气影响小,数据生成周期短、精度高的技术特点。近年来,各种系统技术逐渐发展,如扫描仪测距更长、转速更高,全球定位系统精度更高、体积更小,惯性导航系统更灵敏等,促使激光雷达技术也有了长足的进步。目前,激光雷达技术已可以实现最高2 400 m有效测距的高精度测量模式。为适应不同的作业场景,还有机载、车载和背包等作业模式[1]。
然而,目前国内外对于无人机机载激光雷达常见的一些技术提升措施,在满足精度和密度要求的情况下,跨测区飞行、测区内小角度转弯等提高飞行作业效率的方法,以及此情况下如何有效保证测量精度的方法,尚未有完整和详细的研究。
1 激光雷达作业效率及精度提升方法
1.1 检校场对数据质量影响
激光雷达的误差源主要有全球定位系统定位误差、惯性导航系统姿态误差、激光扫描器的测角误差及测距误差、设备各系统的集成误差4个方面[2]。
为了减少上述误差对数据质量造成的影响,项目开始前应进行飞行检校场作业,在一定的海拔获取原始数据,通过相应的软件得到如下改正参数,以改正初始的点云质量:坐标改正参数X、Y、Z;姿态改正参数Heading(俯仰角)、Pitch(旋滚角)、Roll(偏航角)。
因为检校场需要选择专门的区域,从而占用一个有效架次甚至一个工作日,所以需要研究飞行检校场对数据质量的影响程度,以评估何时需要进行检校场改正,何时不需要进行检校场改正。
1.2 测区内沿着线路转弯角度对数据质量影响
由于无人机必须沿直线飞行,弯曲的铁路线路设计会造成很多的冗余飞行面积。同时,铁路改线范围很大,多飞的面积并无很大的作用。如果无人机在测区内可以沿着线路小角度转弯航飞,则可以有效提升作业效率,但根据相应规范并无明确条例允许此类作业方式。根据实际情况,如由于空中环境的影响,飞机始终处于不水平的状态,存在一个小角度倾斜;车载激光雷达作业方式已在行业内普遍存在,由汽车进行牵引,令激光雷达沿着道路扫描,并且公路设计转弯半径要求是远小于铁路设计转弯半径要求的[3]。由上述原因可知,沿着线路小角度转弯航飞理论上是可行的,但需要准确评估影响程度,以供外业作业人员参考。
1.3 跨测区作业对数据质量的影响
跨测区作业,即根据现场情况多架次交替进行2个测区甚至多个测区的飞行作业。由于不同架次之间可能出现的一些误差,如安装误差、全球定位系统定位误差以及天气影响造成的误差等,此方法对数据质量可能造成不良影响,同时相应规范并无明确条例允许此类作业方式。但此方法可以有效提升外业飞行的作业效率,所以需要研究跨测区作业对数据质量的影响程度,以便外业作业人员调整航线设计。
2 实验设计与实施
2.1 实验流程
实验流程如图1所示。

图1 流程示意图
2.2 实验设计
使用同一设备、采用同一操控方法,对特定时间段内同一区域进行多次不同飞行模式的测量,统计数据质量情况,评估内符合精度;利用普通检查点和特殊检查点,检验航飞的外符合精度;得出结论,输出报告。
内符合精度主要统计点云的分层情况,主要参数有点云厚度、点云平均厚度、点云分层距离、同名断面线距离以及改正数大小。
外符合精度主要依靠点云特征坐标和检查点坐标的差距进行评估,平面精度由特殊检查点评估,高程精度由高程检查点和特殊检查点进行评估。特殊检查点的权重应更高,权重建议为普通点的10倍[4]。
检查点可分为平面检查点和高程检查点[5]。平面检查点同像控点一样,主要布设于地物特征点,如房角、地角、道路转折角等,用于评估点云的平面精度;高程检查点主要布设于平坦无遮挡的区域,如坝子、路面等,用于评估点云的平面精度。点云对地物的再现并不完整,使得精度评估并不准确,所以采用人工特殊标志物的特殊检查点,同时评估平面和高程精度。
2.3 详细流程及注意事项
(1)选择场地:应选择比较典型的区域。(2)设计航线:按照作业规范或者厂家建议设计航线。(3)航飞采集:按照规范执行每一个架次,保证数据质量。(4)数据检查:检查基站全球导航卫星系统(Global Navigation Satellite System,GNSS)、移动站GNSS、惯性测量单元(Inertial Measurement Unit,IMU)等原始数据,有问题时应补飞。(5)数据处理:选择一般性的设置,保证最终结果不受输入参数的影响。(6)检查点采集:应保证高程和平面精度优于10 cm,特殊控制点应保证精度较高。(7)数据统计:应分别统计原始点云和校正点云的质量情况。(8)输出报告:整理成表格、图形等形式。
3 数据分析
3.1 飞行检校场对数据质量的影响
比较使用检校参数前后的点云数据可以明显看出,检校参数对数据质量的提升有明显作用。但通常情况下,检校航线占用了一个架次,对作业效率有影响。在本实验中,在进入正常飞行航线前插入了检校航线,即首先进行检校作业,再进行正常作业。该方式对数据质量提升效果同样明显,与单独做检校并无明显差别。
3.2 跨测区作业对数据质量的影响
在本实验中,以不同航线顺序完成了测区的飞行任务,结果并无明显区别。从理论上考虑,跨测区作业与正常作业并无明显区别,只与起算点的精度有关[6]。控制起算点的精度,就能避免跨测区作业的影响。可见,跨测区作业对数据质量并无影响。
3.3 不同转弯角度对数据质量的影响
根据外业数据的质量统计情况,表1反映了转弯半径、数据质量及飞行姿态的相互关系。
不同转弯角度时,各架次E(东坐标)、N(北坐标)、H(高程)中误差如图2所示。
从图2可以看出,折线整体向右下方向倾斜,说明转弯半径的大小也即飞机姿态对激光扫描的精度确有一定程度的影响。在飞行姿态Roll小于12°以及转弯半径大于800 m时,使用ARS-1000L采集的点云数据是满足当前测绘规范要求,可以应用于地形图、横纵断面等测绘工作。
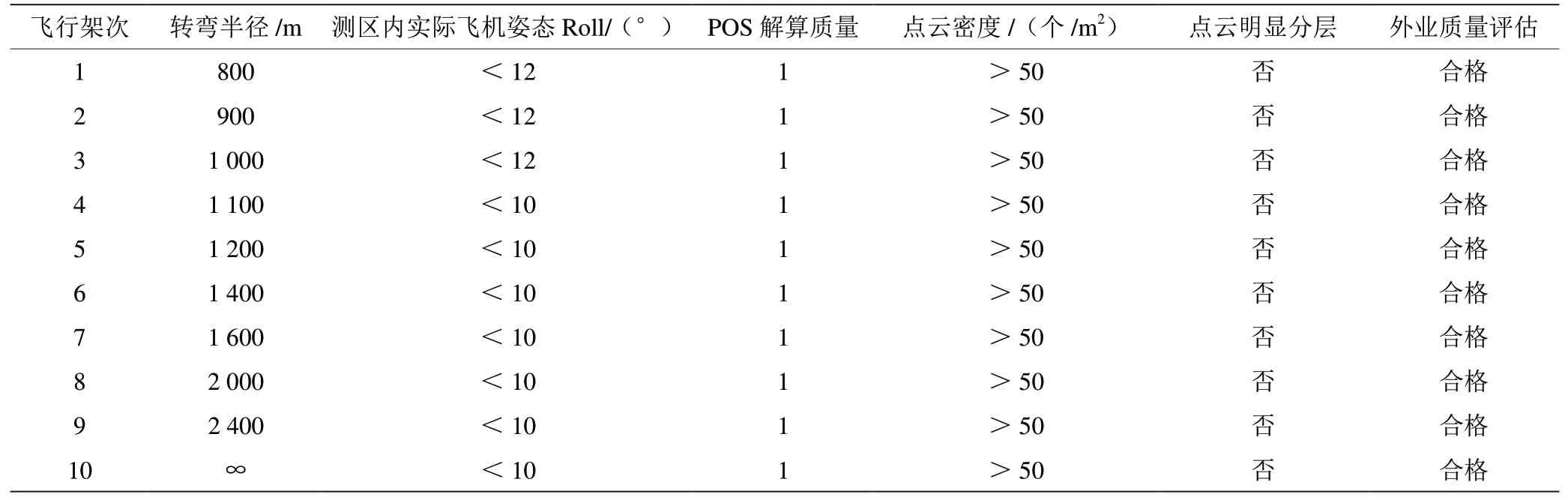
表1 质量统计表
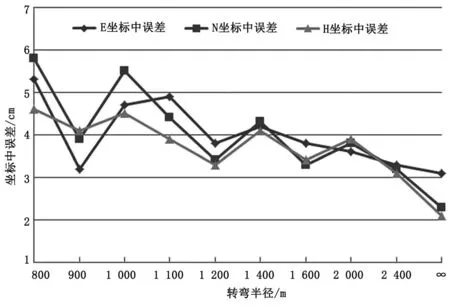
图2 各架次E、N、H中误差统计
4 结论
(1)飞行检校场对数据质量提升有明显作用,可以灵活插入到正常飞行航线前。
(2)跨测区作业对点云精度并无显著影响,涉及不同起算数据时,影响主要与起算数据有关,与飞行方式无关。
(3)本实验所用设备,在飞行姿态Roll小于12°以及转弯半径大于800 m时,飞行数据可满足规范要求。对于同精度或者高精度设备,外业飞行可以将此结果作为参考,但应注意所使用设备的其他要求。