Delta平面并联机器人运动仿真分析
2022-05-28张源
张 源
(枣庄职业学院,枣庄 277800)
1 并联机器人主要零部件的三维建模
利用Creo对并联机器人的主要零部件进行参数化建模。在数据库中保存设计过程中所使用的尺寸(参数),设计者通过更改三维零件的参数来改变二维工程图、三维组合及模具等几何形状,以达到设计修改工作的一致性[1-2]。对RRR并联机器人的主动杆、从动杆、动平台及静平台等建模,结果如图1所示。

图1 RRR并联机器人主要机构
2 机构虚拟装配及干涉检验
Creo中的Assembly模块是专门用来装配零件的[3]。在建立完成零件模型后,利用装配约束将零件固定在组合件里[4]。应用Creo中的装配功能对3RRR平面并联机器人的各个部件进行装配,总装配图如图2所示。
模型装配完毕后,要对其进行干涉检查。发生干涉的零部件要重新进行装配,以确保其装配关系的正确性,直到整个模型不存在干涉为止,从而为下一步进行运动学和动力学仿真做准备[5]。
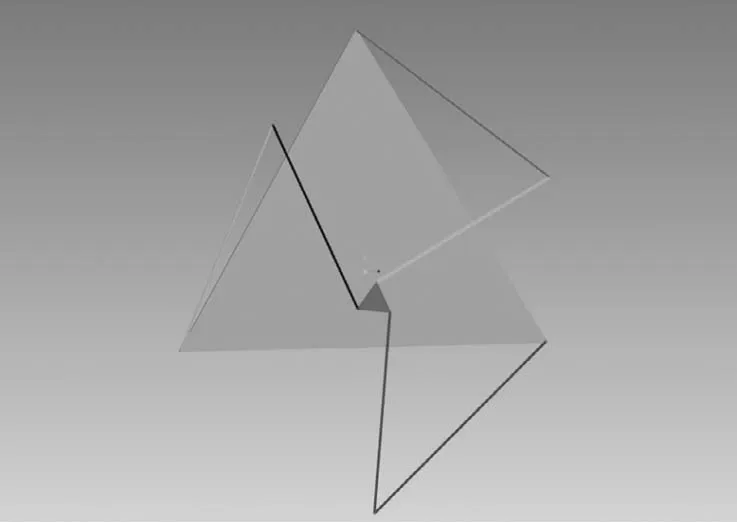
图2 并联机器人三维结构装配图
对并联机器人采用静态干涉检查。检查机构在保证工作空间的情况下,运动过程中会产生干涉。在确保没有干涉的前提下,进入Creo的Pro/MECHANISM模块后,对并联机器人装配体进行机构连接检查。检查结果为无干涉情况后,即可对并联机器人进行运动学和动力学仿真。
3 机构运动仿真分析
在Creo的MECHANISM模块下进行运动学分析。在运动学研究中,忽略作用于系统上的力,通过添加运动副使机构随伺服电动机一起移动。在观察运动中,测量其主体位置、速度和加速度的改变。图3为机构运动学仿真流程图。
给定初始参数:主动杆杆长为600 mm,从动杆杆长为500 mm,动平台边长为80 mm,静平台边长为900 mm。设定动平台的初始位置(-100,0)及姿态,姿态角为0°,做匀速运动,速度为40 mm·s-1,得到动平台匀速运动时主动杆角度θ、角速度ω和角加速度α变化曲线,如图4所示。
改变主动杆杆长,使主动杆与从动杆杆长相等,均为500 mm,其余条件不变,再次仿真得到主动杆角位移、角速度和角加速度变化曲线,结果如图5所示。
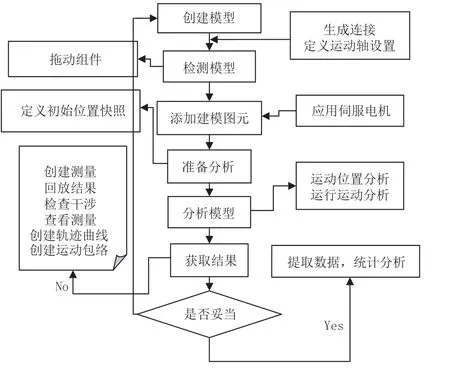
图3 机构运动学仿真流程图
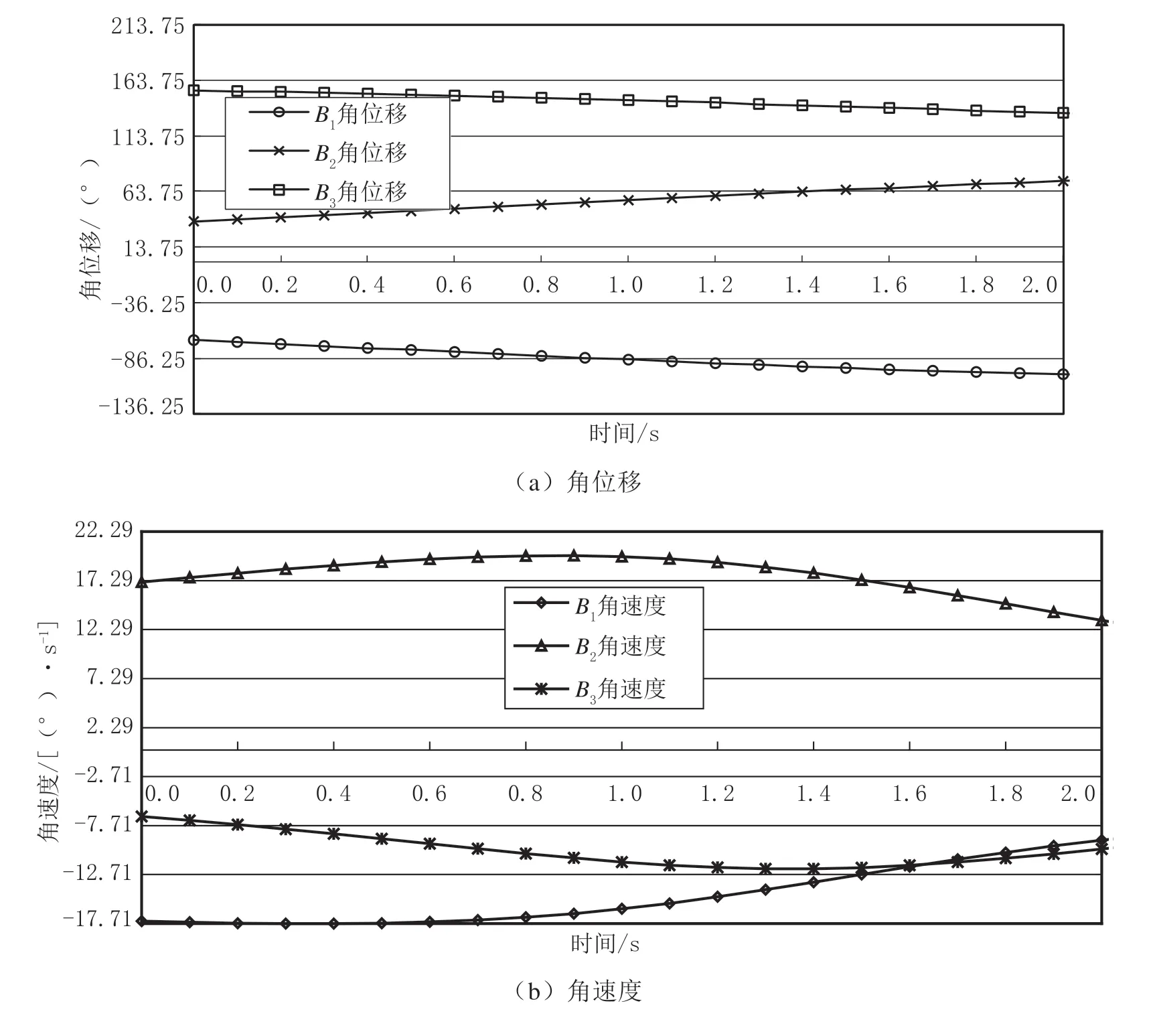

图4 主动杆角位移、角速度和角加速度变化曲线
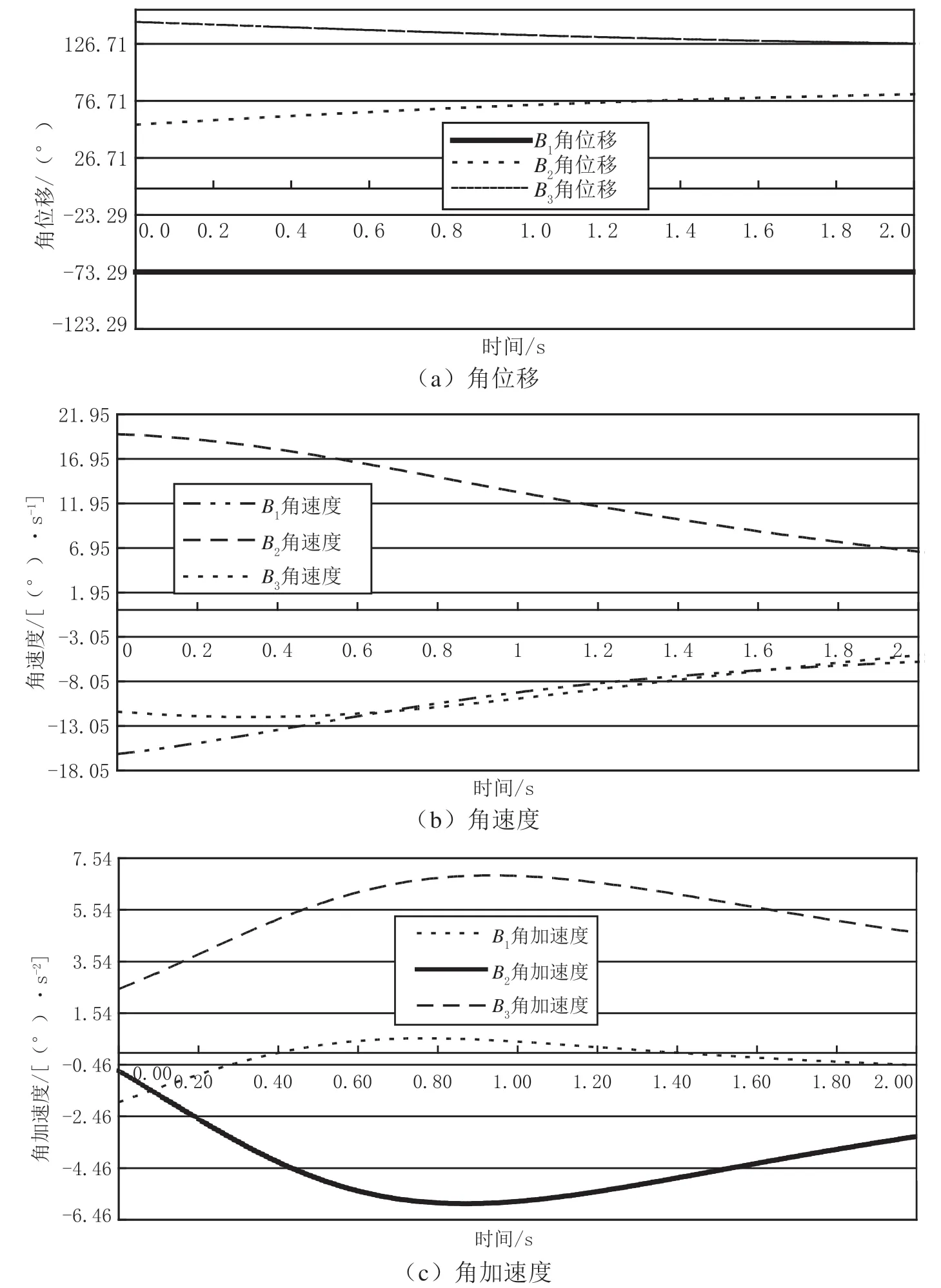
图5 修改参数后主动杆角位移、角速度和角加速度变化曲线
4 结语
对并联机器人主要零部件三维建模,在Assembly模块中虚拟装配并干涉检验。在MECHANISM模块下进行运动学分析,得到在动平台匀速运动时3个主动杆的角位移、角速度和角加速度,并在此基础上研究了尺寸参数对机器人运动学性能的影响。