超小型绝对重力仪主机系统设计
2022-05-26徐进义粟多武王启宇吉望西冯金扬李春剑吴书清
徐进义, 粟多武, 王启宇, 吉望西, 冯金扬,李春剑, 吴书清, 胡 若
(中国计量科学研究院, 北京 100029)
1 引 言
绝对重力仪是直接测量重力加速度的仪器。重力加速度的大小随地理位置不同而变化,并受到地质结构和天体运动等因素影响,因此,准确测定、研究地球上各点重力加速度具有十分重要的意义。绝对重力仪已广泛应用于地震、计量、测绘、大气海洋、地质、天文和理论物理等方面。在国际上,美国Micro-g公司研制的绝对重力仪在高端应用中占主导地位,其中FG5及其改进型水平最高[1,2],被很多国家计量机构采用[3~5],我国也先后引进了该型号绝对重力仪。
中国计量科学研究院(NIM)在20世纪70~80年代研制了第1代绝对重力仪(NIM-I)[6,7]。NIM-I重力仪采用自由下落法,测量不确定度16μGal;1988年研制的第2代绝对重力仪(NIM-II)[8,9]测量不确定度达到10μGal,在可移动、测量自动化等方面也有显著提高,并应用于高精度绝对重力观测研究[3,10];2013年研制的第3代绝对重力仪(NIM-3),主机系统总重量从NIM-Ⅱ重力仪的80 kg降低到52 kg。随后NIM又研制了NIM-3A[4]和小型化的NIM-3C等型号重力仪。NIM-3A的落体下落距离长,测量准确度高,适合实验室应用。NIM-3C的下落距离缩短,整体结构进一步小型化,真空系统一体加工并改用纯钛材料以适应非实验室环境应用。NIM-3系列重力仪都在不同程度上小型化,主机系统做了重大改进[11~15],测量速度从NIM-Ⅱ重力仪的1次/min提高到3~9次/min,测量实现自动化。NIM-3A重力仪2017年参加了重力仪国际关键比对[4,5],测量不确定度达到4 μGal[16,17]。
本研究在NIM-3重力仪的基础上,采用消除下落过程的伺服跟踪装置引发的自振、共基座和车载使用环境下对测量的影响和进一步小型化轻量化的方案,设计了的光学绝对重力仪新主机系统。
2 超小型绝对重力仪主机系统
目前对振动的消除有2种方法:第1种采用参考镜长周期惯性悬挂与干涉仪短周期伺服隔振,机械部分采用动平衡对称下落方法[1,17,18],如美国的A-10、FG5和FG5X(动平衡对称下落)等系列绝对重力仪,清华大学研制的T-1型绝对重力仪;第2种采用基于拾振的软件修正方法,机械部分采用伺服跟踪下落方法[3,18]。
NIM研制的NIM-I、NIM-Ⅱ、NIM-3绝对重力仪采用这种方法,该方法在在周围没有大的振动干扰源条件下,测量结果良好。但受到拾振器频率范围0.016~70 Hz的限制,在环境条件差的地方修正效果不理想,特别是在共基座平台上仪器每次伺服高速下落都会带来自身振动(自振频率100~150 Hz)的影响,使振动信号影响干涉仪参考棱镜,参考镜产生微振进而影响下落位置测量准确度和重力加速度测量结果稳定性。
2.1 主机系统设计方案要点
设计的超小型绝对重力仪主机系统在保留NIM-3A和NIM-3C重力仪主机系统的优点的同时,主要在3个方面做出改进:
1)改变下落方式,设计一套新的落体机械释放和接落装置及新运行方式。由此在落体自由下落过程中,消除原先伺服电机高速运动带来机械自振对系统的影响,并在保持真空室总高度不变的条件下增长了落体下落的有效测量距离。
2)落体下落行程中远离磁性部件,减少磁性材料对它的影响,原先落体与传动含磁零件距离较近,并且一直跟随落体运动。
3)增加保温措施并改进支撑方案,适应低温野外环境下工作。其中,下落方式的改变最为重要,是设计的核心。
2.2 落体下落机构
NIM-3A和NIM-3C绝对重力仪主机系统结构见图1所示,该系统干涉仪的主体置于落体和参考镜之间,测量自由落体的光路在落体下方。下落时落体和传动托盘共同自由下落,传动托盘在高速下落过程中会产生自振,引起参考镜的微小振动,因此在参考镜处增加拾振器测量振动,以减小或消除振动对测量的影响。现有拾振器修正方案对地基环境好的实验室修正效果良好,但在野外等特殊环境对高频振动抑制不够理想。
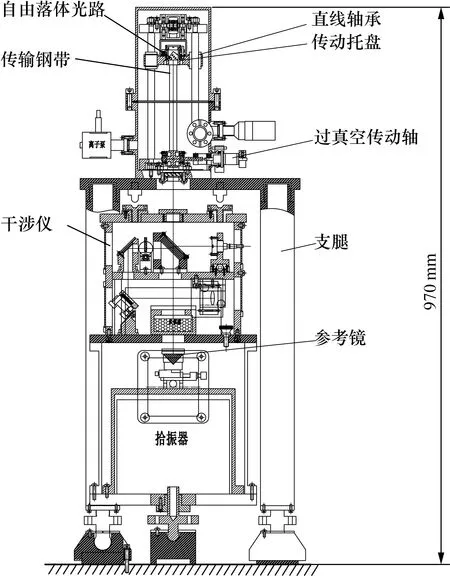
图1 NIM-3C的主机系统结构
新方案采用了新的无自振和无磁性影响下落方案,超小型主机系统结构新设计见图2所示。
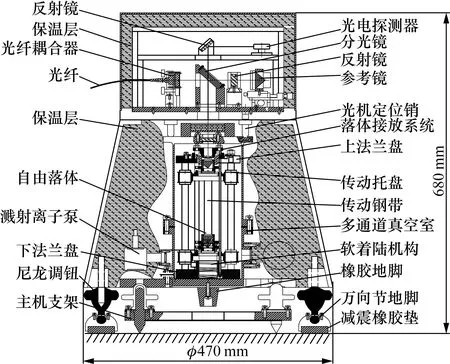
图2 绝对重力仪主机系统结构新设计方案
为了避免下落过程中的托盘高速下落带来的自振引发的干涉测长参考镜的抖动问题,新设计采用了一种完全自由下落运动方式,在下落的有效测量过程中,重力仪主机系统只有落体处于运动状态,包括托盘和电机的所有其他机械部件均处于静止状态。
具体方案为:位于起始位置传动托盘由传动电机驱动带着自由落体快速上升到真空筒内指定位置,上面有一套定位和接放机构托住落体;此后传动托盘由电机驱动降到下面起始位置;电机在远离落体的位置通过机械机构控制上方接放机构旋转一个角度带动机械控制杆释放自由落体;落体自由下落,至底部由一套软着陆机构通过机械手臂抱住落体,完成一次下落。
新方案相对于原伺服跟踪下落和其它绝对重力仪下落方式相比较具有以下特点:
1)托盘机构在落体下落过程中完全静止,不产生自振,而且自由落体下落到底部与托盘无直接接触,只与软着陆机构非刚性接触,避免了自由落体对测量系统的冲击。
2)原伺服跟踪下落过程,伺服电机和托盘要经历静止-加速-减速-停止几个阶段,实际有效可测量距离段比较短,限制了测量准确度的提升。新设计的下落过程,有效测量距离增加近一倍,有利于进一步提高测量准确度和重复性。
3)原伺服跟踪下落过程,伴随落体下落的传动托盘上有磁性零件一直伴随下落运动,且距离落体较近,影响测量不确定度。在新设计方案中,落体自由下落时托盘及传动装置始终在底部,远离落体,对落体下落不产生磁性干扰。
4)传统的3条长主机支腿结构(见图1)改为主机支架结构(见图2),稳定性和隔振性能更好。
2.3 干涉测长机构
在结构上,NIM-3A和NIM-3C均采用一种变形的迈克尔逊结构的干涉仪测量落体的下落过程,见图1所示。在新方案中,干涉仪的主体由落体下方改为在落体上方水平放置,相较于NIM-3系列的干涉仪在内部结构上有改变。参考镜将采用水平放置方案,也可尝试直接垂直放在改进的内置拾振器的镜座上,且都放置在干涉仪内部,更便于调整,减少了镜片使用量,干涉仪整体变小,见图2所示。这些措施同时降低了主机系统重心,大幅减小了主机系统高度,并可减少地面等外界振动的影响,也使主机系统更加轻巧便于携带和安装。
2.4 支撑结构与保温措施
在低于0℃低温室外环境工作时,设计使用温度为0~55℃的过真空传动轴的自由旋转会受影响;并且真空室在过低温度下密封件的冷缩,特别是通光玻璃镜片衔接处,会增加漏气风险。新干涉仪的支撑首次采用可调节的锥形桶状结构,把主机系统机械部分一同包裹在内,桶内可加保温材料和加热温控装置,保证主机系统在低温环境下内部温度处于正常工作范围并相对稳定,系统正常工作。底部均布3个可调节水平高低的地脚旋钮,部分部件采用非金属材料,接触地面处加装厚的橡胶垫片,以减少外界振动对仪器的影响。
2.5 综合性能和不确定度预估
重力仪主机系统总高度不超过700 mm,宽度不超过500 mm,重量不超过30 kg,新方案测量速度预期可达到6次/min。该重力仪的超小型和轻量化设计,便于运输,到达重力测量点位后可快速完成重力仪系统的组装工作,单人即可驾驭对重力仪的全部调整操作,短时间内启动测量。
绝对重力仪的不确定度在文献[19]中有系统的分析。根据已掌握的NIM-3C的实验性能和不确定度水平,结合新方案的主要改进,光束垂直性、干涉测长、落体旋转、反弹效应和测量重复性的贡献为新方案的主要不确定度来源,其中第2至第5项的贡献由于新方案的改进设计可显著减小,在正常测量环境下和采用较好辅助测量设备的条件下的测量不确定度在NIM-3C的基础上有所提升,预估为10 μGal。
表1是新设计方案相对于NIM-3A和NIM-3C的主要特点汇总。
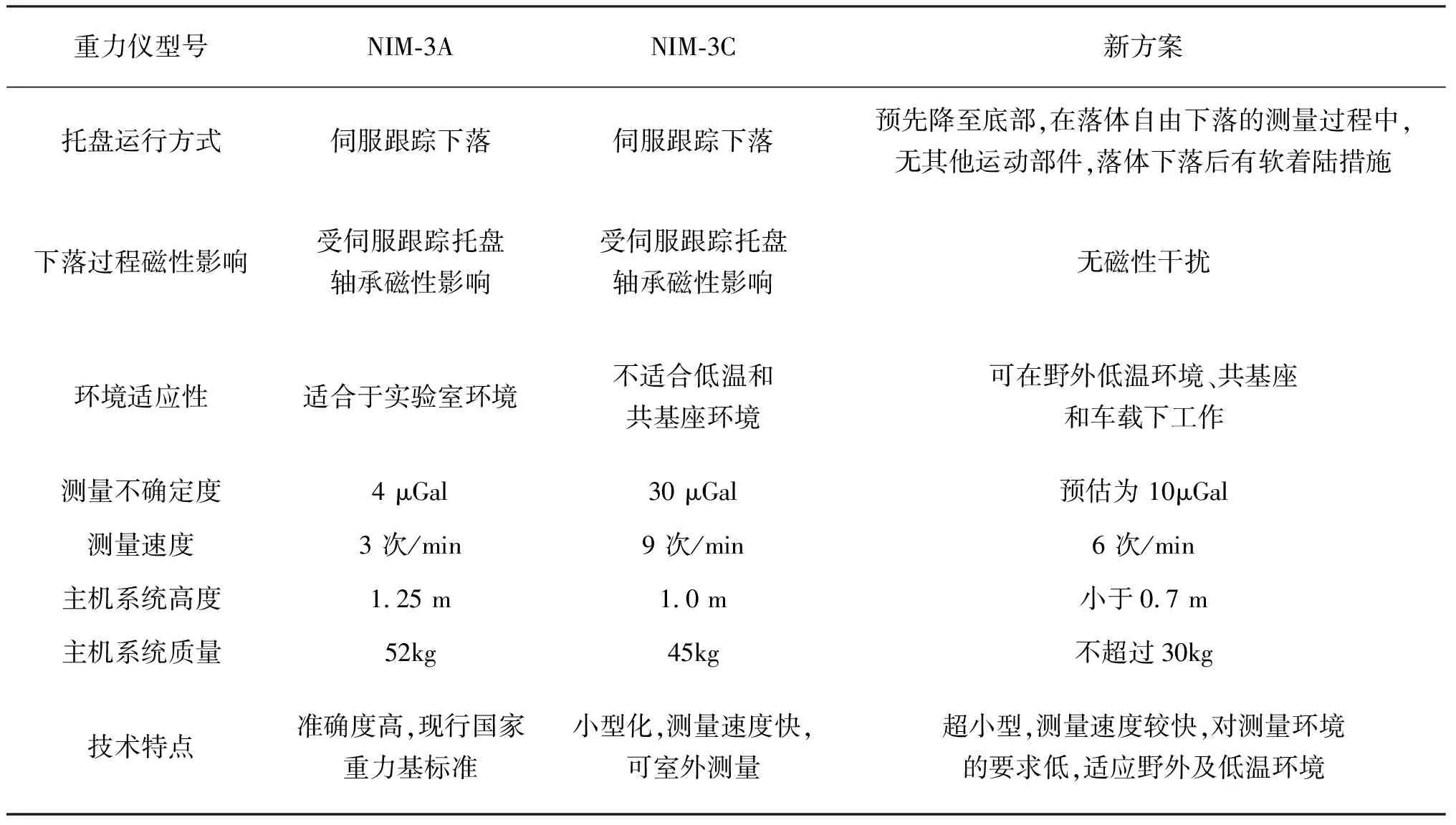
表1 新设计方案相对于NIM-3系列的主要特点
3 结 论
为满足室内外多种环境下的重力加速度测量需求,设计了新的超小型绝对重力仪主机系统。其突出特点是在对落体自由下落的干涉测长过程中,重力仪没有其他运动部件,完全消除了原型号内部机械传动在跟踪下落过程中带来的自身振动和磁性干扰,以提高重力仪测量准确度和数据稳定性;适应低温环境、减小外部振动影响和小型化等措施,满足室内外多种环境下的测量工作,特别是在我国一些特殊应用部门,如车载、共基座和野外低温环境等条件下开展测量工作。由于该重力仪光机系统紧凑、整体体积和重量显著减小,便于运输和在测量点位的快速安装调整,研制后可进一步商业化推广应用。新设计方案经研制验证,可望应用于我国重力基准NIM-3A的改进。