高速铁路接触网振动模拟方法研究
2022-05-25潘利科陈立明张海波邢彤杨才智董冠阔
潘利科,陈立明,张海波,邢彤,杨才智,董冠阔
(1.中国铁道科学研究院集团有限公司标准计量研究所,北京 100081;2.北京工业大学,北京 100124)
接触网架设在高速铁路线路的正上方,是高速铁路的重要组成部分。在高速列车运行过程中,接触网通过与列车上方的受电弓滑板滑动摩擦过程实现向列车的供电,供电质量的稳定性对列车的可靠运行具有重要影响。实际服役过程中,由于受电弓与接触网之间的动态相关作用,接触网发生振动,其振动性能与列车的受流质量密切相关,研究接触网的振动特性,对评估接触网的服役寿命以及列车受流质量具有重要价值。由于接触网是带电运行,并且位于高速铁路线路上方,对接触网的振动规律采集带来困难。采用有限元方法模拟接触网的振动规律是目前最为常用方法,目前在接触网的振动仿真过程中得到普遍应用。本文采用有限元软件,根据实际高速铁路接触网的特点,建立了接触网有限元模型,并进行了相关的结果验证,为后续接触网振动规律的深入分析奠定了基础。
1 接触网模型
1.1 模型建立
本文采用有限单元法建立高速铁路的接触网模型,即将接触网的实体模型离散为若干个单元,每个单元之间通过节点连接,将各个节点的位移作为未知量,通过边界参数对各个单元进行数值求解。
高速铁路的接触网结构主要由悬吊装置、支撑装置、定位装置、支柱与基础等组成。根据受电弓滑板与接触网之间的动态作用特点,有限元建模过程中可以忽略支柱与基础、支撑装置及辅助等设备,仿真分析中主要研究包含悬吊装置与定位装置的简化后的接触网模型:
(1)定位器主要简化为集中质量单元和Z方向(接触网高度方向)的位移约束,腕臂结构主要简化为Y(垂直线路方向)、Z方向的位移约束,张力补偿器则简化为恒定的拉力载荷。
(2)承力索、接触线、弹性吊索设置为具有铁木辛哥梁结构的梁单元,整体吊弦等效为杆单元。
简化后的接触网模型如图1所示。
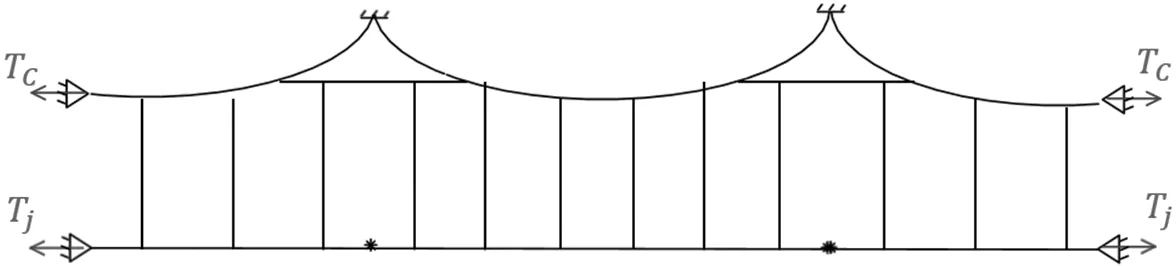
图1 接触网简化几何模型
接触网有限元模型的主要参数包括跨距、吊弦间距、高度、拉出值等接触悬挂的几何结构参数,以及承力索、接触线、弹性吊索、整体吊弦等线索材料的弹性模量、密度及线材截面等参数。其中,承力索、接触线、弹性吊索采用梁单元建立,其考虑了仿真过程中的弯曲变形与剪切变形,能较好的模拟接触网的静态/动态几何大变形情况;采用三维应变杆单元建立整体吊弦的结构模型,可以同时考虑空间杆单元以及承受拉力不承受压力的特性,单元刚度矩阵为:
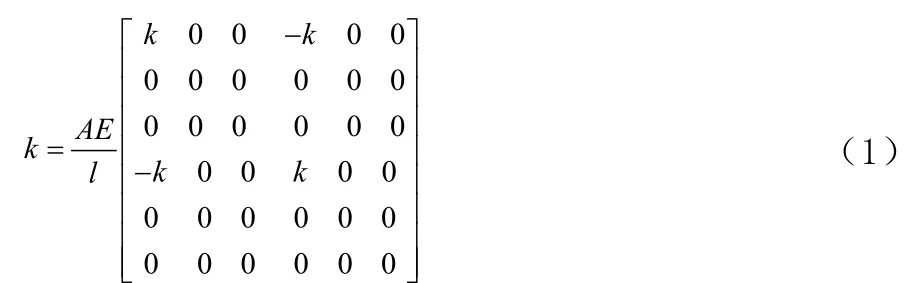
其中,A为整体吊弦的截面积,E为弹性模量;l为长度,k则为刚度变量。当整体吊弦承受拉力载荷时,k=1;当整体吊弦承受压力载荷时,k=1e-6。
吊弦线夹和定位器采用质量点单元建立,其具有3个坐标方向的移动和转动自由度,且每个方向都可以施加不同的质量和旋转惯量。
接触网有限元模型的运动微分方程为:

其中,[Mca]为接触网的质量矩阵,[Cca]为单元阻尼矩阵,[Kca]为接触网的刚度矩阵,[x]为接触网的节点位移矩阵,[Fca]为接触网的外部荷载矩阵。
在图1的接触网简化几何模型中输入相关参数,并根据不同的单元类型和材料属性对网格进行划分。同时,模型中承力索悬挂的位置施加Y向与Z向的位移约束,在接触线定位处施加Z向的位移约束,并施加恒定的拉力。弹性吊索的张紧力通过预应力的形式添加到模型中弹性吊索的梁单元上。输入参数并划分网格后的接触网有限元模型如图2所示。
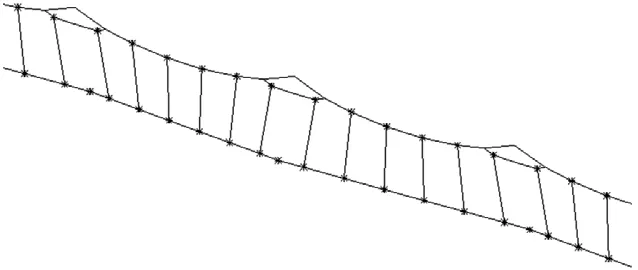
图2 接触网有限元模型
1.2 静态找形
有限元仿真计算时,接触网的初始求解所用的模型是未知的,需要根据其平衡状态的位置确定,此时接触网结构与接触线的平衡位置是已知的。根据接触线的平衡位置计算接触网平衡位置的初始几何和应力状态即为接触网的静态找形。
接触网模型静态找形的过程中,当连接承力索和接触线的整体吊弦的长度确定后,此时接触网平衡位置的几何参数和应力分布也随即确定。因此,接触网的静态找形过程也是计算满足初始平衡状态要求的吊弦长度的过程。
本文通过多次调整吊弦长度进行迭代计算实现接触网的找形分析。首先根据接触网的静态几何参数建立接触网的初始模型,如图3(a);然后计算接触网在张力和自重作用下的垂向位移,如图3(b);再计算接触线的偏移量,并根据偏移量调整吊弦的长度,并对有限元初始模型进行重构和迭代计算,最终确定接触线的平衡位置,如图3(c)所示。

图3 接触网找形分析
在接触网的实际施工过程中,当承力索和接触线架设完成后,安装弹性吊索也会改变承力索和接触线的几何状态及应力状态。因此在接触网有限元模型的找形过程中,应根据其实际安装过程进行建模,即需要考虑弹性吊索安装过程对其几何状态的影响,得到承力索和接触线的几何形状变化造成的接触网应力状态。
模拟接触网架设的有限元建模过程分为如下过程:(1)首先建立初始状态为直线的承力索和接触线的有限元分析模型,在模型中的承力索和接触线的两端分别施加Y、Z方向的位移约束和旋转约束,同时定义张力载荷,如图4(a);(2)然后分别在承力索的悬挂处施加Y、Z方向的位移约束,并在承力索的弹性吊索线夹连接点处施加位移载荷;同时在接触线的定位器连接点施加位移载荷,如图4(b);(3)在有限元模型上定义重力载荷并进行求解,得到承力索和接触线的变形状态;然后再利用计算得到的接触网模型的节点位移更新模型的几何位置;在新模型上添加弹性吊索,并对弹性吊索施加预应力,同时在承力索和弹性吊索的线夹连接位置施加位移载荷,见图4(c);(4)再次求解,根据求解结果再次更新接触网有限元模型的几何位置,最终得到承力索和接触线几何变形后的接触网有限元模型,并据此调整整体吊弦的长度,判断接触线的平顺度是否满足要求,如图4(d)。
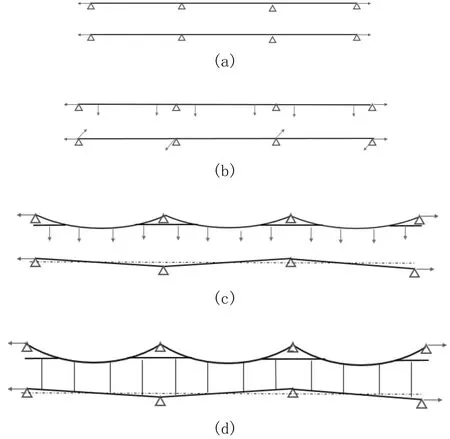
图4 接触网有限元模型建立过程
在接触网的静态找形分析中综合考虑其实际安装过程,通过多次迭代计算获得给定边界条件的接触网初始有限元模型,计算过程如图5所示。

图5 接触网模型搭建流程
2 受电弓模型
2.1 模型建立
受电弓包括弓头、框架、悬挂弹簧和支持结构,其框架又分上部框架和下部框架。本文根据受电弓的结构特点,选用三质量块弹簧阻尼系统进行接触网振动特性分析,其中m1、m2和m3分别为受电弓弓头、上框架、下框架的等效质量,k1、k2、k3、c1、c2、c3分别为对应部分的弹簧系数和阻尼系数,F0为受电弓静态接触压力,P(t)为受电弓滑板与接触线之间的接触压力。受电弓的三质量块模型如图6所示。
图6 受电弓等效的三质量块模型
受电弓的动力平衡学方程为:
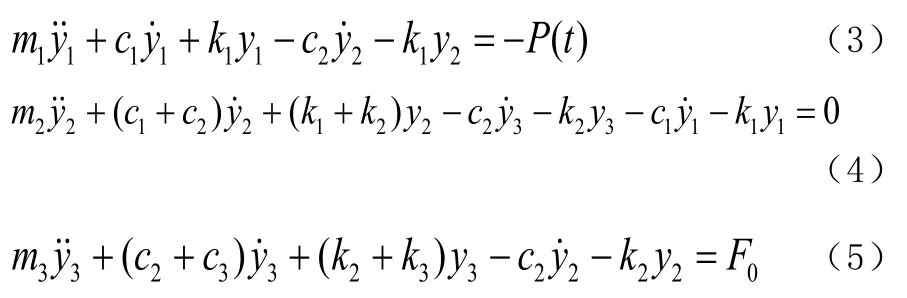
上述动力学方程转换为矩阵形式为:

其中,[Mpa]为质量矩阵,[Cpa]为阻尼矩阵,[Kpa]为刚度矩阵,[y]为节点位移矩阵[Fpa]为外载荷矩阵。
2.2 接触网与受电弓的接触
实际服役过程中,受电弓与接触线之间通过滑动接触摩擦取电,从而实现向列车供电的目的。本文采用罚函数法在接触网有限元模型中建立接触网与受电弓的刚-柔接触状态,如图7所示,模拟实际列车运行过程中受电弓滑板与接触线的动态接触和取流过程。
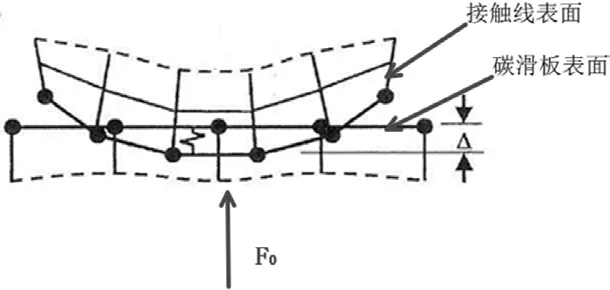
图7 接触线-受电弓滑板的接触示意
模型中,目标单元和接触单元在接触线与受电弓滑板之间建立梁-梁刚-柔接触对。其中,受电弓滑板模型由目标单元创建,为无质量的刚性体;接触线等效为柔性体,其单元依附于接触线的梁单元上。
弓网之间的接触压力P(t)在仿真计算过程中则通过接触刚度与接触线、滑板之间的相对位置来确定,当接触线模型上的节点位移大于滑板模型上的节点位移时,认为滑板离线,接触压力:

当接触线模型上的节点位移小于或者等于滑板模型上的节点位移时,两者的位移差是Δ,接触压力则由Δ和接触罚刚度Kc确定:

联立式(2)、式(6)、式(7)和式(8),得到弓网耦合动力学方程:

考虑到系统的非线性,采用Newmark-β积分法进行弓网动态耦合过程中的求解。
3 接触网振动仿真与验证
根据实际高铁线路接触网的安装特点以及接触网有限元模型特征,使用实际线路接触网设计参数与受电弓模型参数建立16跨的接触网动态仿真模型,如图8所示,模型中包含接触线、承力索、弹性吊索、整体吊弦等关键悬吊线索结构。
图8 接触网动态仿真模型
建立的接触网采用弹性链型悬挂结构,拉出值为300mm,跨距50m,一跨6根吊弦,接触线和承力索的型号为CTMH150和JTMH120,其张力分别为21kN和35kN。
实际高铁受电弓结构参数采用三质量块模型进行等效,等效后的模型参数如表1所示。

表1 等效的受电弓模型参数
通过采集实际线路高速铁路接触网的抬升量数据,并与有限元模拟的数据进行对比,验证接触网有限元模型和模拟方法的准确性。
图9所示为采用本文建立的有限元模型和方法进行接触网振动仿真得到的结果与实测结果的对比曲线。从图中可以看出,实测吊弦的抬升量与仿真吊弦的抬升量随时间变化趋势基本接近,均是当列车受电弓通过被测吊弦时出现最大抬升量,列车经过后吊弦的抬升量波动衰减。最大抬升均出现在后弓上。实测过程中由于受到外部环境、采集装置误差等因素影响,实测抬升量数据比仿真数据偏小。此外,从图9还可以看出,受电弓经过时,接触网及整体吊弦在受电弓滑板的抬升力作用下发生振动,出现较大的抬升波动,并且前弓与后弓的波动会发生叠加和交互影响,对接触网和整体吊弦的寿命均产生较大影响。
通过比对图9中的模拟结果和实测结果,两者抬升量最大值误差在20%左右,认为结果在可接受误差范围之内,可以用于预测并分析实际线路接触网的振动规律。
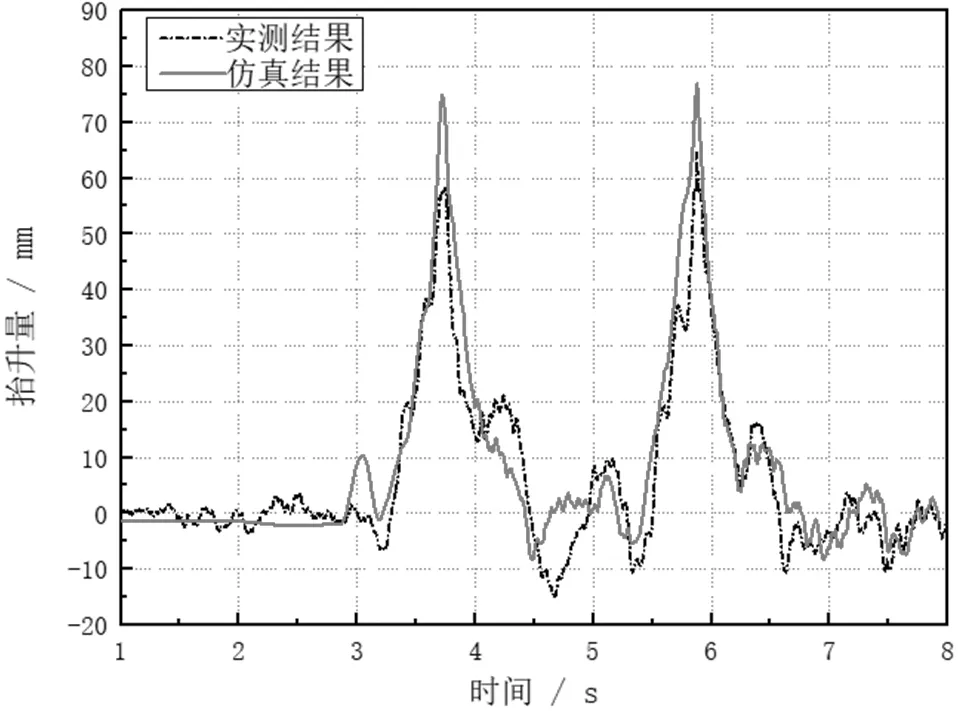
图9 有限元仿真与实测结果对比
4 结语
本文根据高速铁路接触网的安装和服役特点,采用有限元方法建立了接触网的等效仿真模型,并通过实测数据验证了模型和仿真模拟方法的准确性,得出如下结论:(1)采用静态找形、模拟实际接触网架设过程等方法建立了接触网的梁杆有限元模型;(2)通过三质量块等效模型建立了受电弓的有限元模型;(3)采用罚函数法建立了受电弓和接触网之间的刚柔接触对;(4)有限元模拟结果与实测结果比对发现,建立的有限元模型和方法是可信的。
