弹道导弹目标识别方法研究
2022-05-25周尚辉曾德贤胡晶晶吴署光赵彤
周尚辉,曾德贤,胡晶晶,3,吴署光,4,赵彤
(1.航天工程大学,北京 101416;2.中国人民解放军95806部队,北京 100076;3.中国人民解放军31638部队,云南 昆明 650100;4.中国人民解放军32039部队,北京 102300)
1 前言
弹道导弹因其射程远、精度高、机动性好、杀伤威力大、突防能力强等独特优势,已成为世界军事强国竞相发展的重要武器装备,随之而来也给各国的弹道导弹防御系统带来了前所未有的挑战。随着相关领域的科学技术发展,分导式多弹头技术和诱饵技术得到广泛运用,弹道导弹防御系统中的目标识别问题日益凸现。目标识别已逐渐成为弹道导弹防御系统的核心技术之一,备受相关研究领域专家学者关注。
在针对来袭弹道导弹目标的防御作战中,由于诱饵具有和弹头目标极为相似的特性,且各类目标在飞行过程中特性均产生动态变化,基于目标不同特征开展弹头目标的真假判别成为弹道导弹目标识别的关键。合理运用多种弹道导弹目标特征识别方法,通过对各类目标间特征的比较排除诱饵和碎片等假目标的干扰,从目标群中筛选出真实的弹头目标,这也是当前弹道导弹防御系统研发的一个重要领域。
2 弹道导弹目标特性分析
2.1 弹道导弹目标飞行阶段
弹道导弹的整个飞行过程分为助推段、中段和再入段三个阶段。在飞行助推段,导弹在燃料燃烧产生巨大推力的作用下不断爬升高度,产生的尾焰具有可见光、短/中波红外和紫外等显著识别特征,此时发动机处于工作状态,弹头弹体尚未分离;在飞行中段,弹头与弹体分离,诱饵、干扰机、假目标等各类突防装置被相继释放,弹头隐匿于由碎片、诱饵、干扰机、假目标等构成的威胁目标群中,冲出大气层后在近似真空环境中惯性飞行;在飞行再入段,威胁目标群在大气阻力的作用下减速返回大气层,碎片和轻诱饵在该阶段由于大气阻力的摩擦而剧烈燃烧,剩余的弹头和重诱饵会在高速再入过程中电离大气层,在其迎面和尾部产生等离子鞘和尾流。弹道导弹目标飞行各阶段如图1所示。
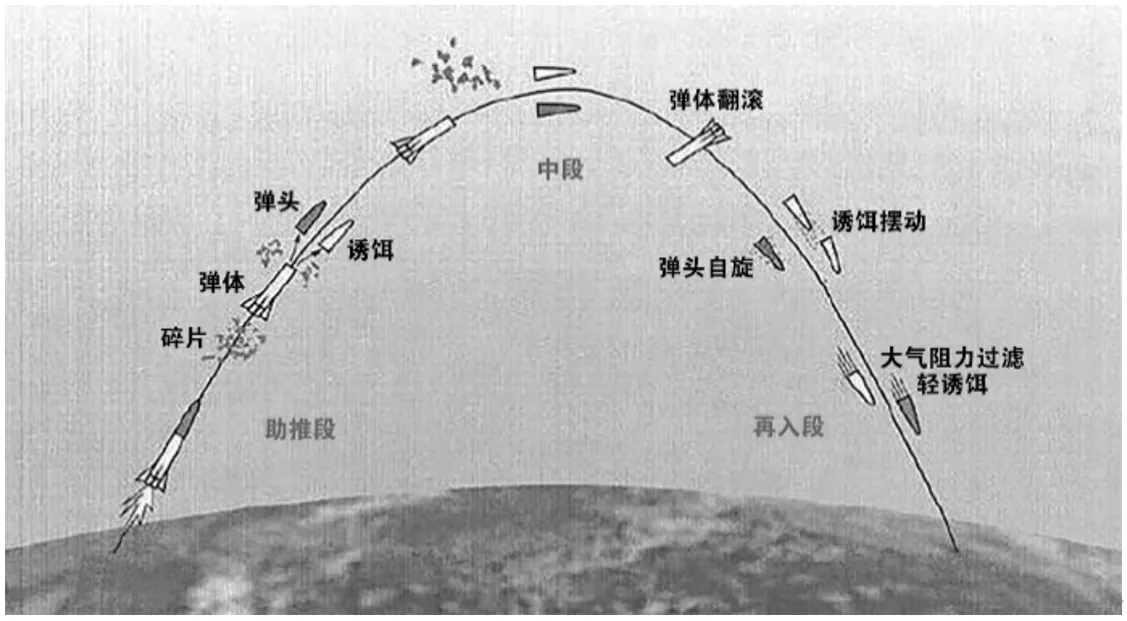
图1 弹道导弹目标飞行阶段示意图
2.2 弹道导弹目标伴飞对象
弹道导弹目标飞行时因其动力原因和突防需求,会产生各种伴飞物,主要包括弹体、碎片、诱饵等。
碎片是弹道导弹飞行过程中产生数量最多的伴飞物。导弹在飞行过程中,动力装置、制导装置等协同作用使其按程序飞行,其中各个部件在不同阶段发挥作用后不断被丢弃,以此提高导弹飞行能效。除此之外,导弹的弹体结构系统级间分离多采用爆炸螺栓方式连接,也使得导弹在飞行过程中产生大量碎片。
弹头诱饵是人为设计装载于导弹上的突防装置,包括轻诱饵、重诱饵、金属箔条以及电子干扰机等。轻诱饵主要包括表面金属涂层覆盖的气球、轻质模拟弹头和轻型角反射体,均为充气型假目标,具有简易、廉价、可携带数量多的特点,其中轻质模拟弹头最为常见,由薄塑料制成,并以金属箔条或丝网包覆,外形与弹头几乎相同。当导弹飞行至大气层外时,轻诱饵被释放并充气成型,在弹头周围沿弹道惯性飞行,直至再入大气层急剧减速后高空解体。重诱饵由密度大、熔点高、耐侵蚀、稳定性好的特殊材料制成,具备与弹头目标相似的弹道特性与反射特性。金属箔条作为一种电子对抗措施,在被抛洒至空中后会产生极强的雷达反射信号,对防御雷达造成干扰。电子干扰机安装于导弹战斗部位,随弹头一起突防,可通过向导弹防御系统雷达转发虚假回波信号的方式制造电子欺骗,干扰雷达对真实弹头目标的跟踪,或利用噪声干扰对导弹防御系统雷达进行干扰压制,削弱雷达的作用距离。
2.3 针对弹道导弹目标特性的识别任务
在弹道导弹飞行的三个阶段中,助推段因其可见光、红外等散射特性明显,且飞行速度较慢,成为导弹飞行过程中最易于被探测掌握的阶段。处于该阶段的导弹没有产生大量碎片,也没有释放各种突防装置,因此目标识别问题并不突出;飞行中段是导弹飞行过程中时间最长的阶段。处于该阶段的导弹不受大气阻力影响,弹头、弹体、整流罩、诱饵和碎片等均在弹头附近沿弹道惯性飞行,形成一个扩散范围达几千米的威胁目标群。如何从威胁目标群中识别出隐匿于其中的弹头,是弹道导弹目标识别的核心任务;再入段是导弹飞行过程中持续时间最短的阶段。在该阶段,威胁目标群中伴随弹头飞行的轻诱饵、金属箔条、碎片等会在大气阻力的作用下剧烈燃烧,急剧减速后高空解体,只留下耐高温侵蚀的重诱饵伴随弹头继续飞行,呈现出类似弹头的运动轨迹。针对弹道导弹飞行中各阶段的不同目标特征,开展弹头识别任务,在导弹防御体系中发挥着至关重要的作用。
弹道导弹在中段飞行时间最长,大量非弹头目标伴随弹头飞行形成威胁目标群,且弹头目标雷达散射截面积小、特征变化快,难以分辨真假;弹道导弹在再入段飞行速度快、机动性强,还时常伴有分导式多弹头、弹头末端机动等突防措施。因此这两个阶段将是进行弹道导弹目标识别的主要阶段。
弹道导弹飞行过程中,除了数量庞大、特性复杂的伴飞对象使弹头识别更加因难外,近年来,许多国家还将隐身技术引入弹头设计中,通过改变弹头或防护罩形状、覆涂雷达吸波材料等方式增强弹头目标的隐身性能,以此减弱其雷达反射信号特征。其中最为常见的是将弹头设计成尖头球底的锥球体形状,可使其在被X波段雷达前向探测时雷达散射截面积降为普通圆锥体的万分之一,极大程度上削弱了防御雷达对其的探测识别能力。
此外,专家学者仍致力于“反模拟技术”的研究,对弹头进行伪装,将真弹头包裹在气球内部,使真弹头更像诱饵,从而达到“假似真,真似假”的效果。这些措施无疑给弹道导弹防御系统的目标识别带来了严峻挑战,同时也促进了弹道导弹目标识别技术的发展,催生出基于RCS特征、微动特征、极化特征等特征量的一系列弹道导弹目标识别方法。
3 弹道导弹目标识别方法
3.1 基于RCS特征识别
目标的雷达散射截面积(RCS)是一种反映目标在雷达接收方向上对雷达信号散射能力的度量。基于RCS特征的识别方法主要是通过对目标回波的序列幅度变化特征分析来达到识别弹头目标的目的。为了实现弹道导弹在打击行动中的突防,弹头在设计时采用姿态修正技术,在飞行过程中控制飞行角度,使其飞行轨迹与防御雷达照射方向保持一定的姿态角度范围,从而控制弹头在被防御雷达探测时呈现尽可能小的RCS。而弹体、诱饵和碎片等一般不具备姿态控制功能,在飞行过程中角度变化异常剧烈,呈现出与弹头目标不同的RCS特征。弹道导弹防御系统中,窄带雷达距离维分辨率较低,很难用时域波形对目标进行分类,但其目标回波中包含的目标强度信息具有显著的序列幅度起伏特征,反映了目标散射强度的变化信息,可用于对弹头目标的识别。
与此同时,具备RCS测量功能的雷达装备还具有造价低廉、易于研发等优势特点,因此,基于RCS特征的目标识别方法成为弹道导弹目标识别研究和应用的主要方向之一。
3.2 基于微动特征识别
微动是指目标因其特殊结构而受到多种外力作用下产生的小幅运动,其运动状态是目标“独一无二”的精细化特征,如同人的指纹一般,具有极强的身份标识性。弹头目标的微动特征从细节上反映了目标的运动特性、结构特性和电磁散射特征。弹头目标的进动这一运动特征是识别真假弹头的重要依据,所谓进动是指自旋目标在外力作用下其自旋轴线环绕中心轴线发生缓慢转动的现象,自旋轴线与中心轴线的夹角称为进动角,如图2中θ所示。弹道导弹在设计中,需要对弹头应用自旋转技术和姿态控制技术,使其在飞行中全部突防装置释放完毕后产生“自旋”现象,从而达到稳定状态,确保弹头能够按预定落点精准命中目标。自旋过程中,弹头会产生自转和章动现象,即“鼻锥摇摆”,同时也会存在一些进动现象,但进动角一般不大,对目标回波的影响较小。然而,轻诱饵、重诱饵和电子干扰机等假目标为节约成本考虑并没有应用相关稳定技术,不具备此类调整能力,因此会出现大幅摆动、大角度进动,甚至翻滚现象,使目标回波产生大幅度起伏,与弹头目标回波形成鲜明对比。
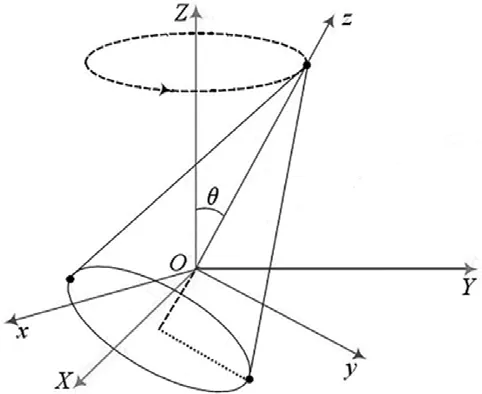
图2 弹头目标的进动
由于弹头所独有的自旋转技术和姿态控制技术,使其在稳定性上区别于其他假目标,而微动是一种可控性较低的小幅运动,特征精细且极具身份标识性,对弹头目标微动的模拟十分困难,因此,基于微动特征的目标识别方法被认为是弹道导弹目标识别领域内最具发展潜力的技术之一。
3.3 基于极化特征识别
(1)窄带极化。窄带雷达体制指雷达发射信号为单频信号或带宽较窄的电磁波,此时回波信号的距离分辨率极低。通过窄带极化对目标极化散射特性进行研究时,首先依据雷达准单色回波信号得出目标的极化散射矩阵,其次在此基础上分析不同方位角下的极化不变量,最终依据一系列极化不变量和其反应的目标特性实现对目标的分类与识别。
(2)宽带极化。对于具有高分辨率的宽带信号,目标的散射特性可以通过雷达的时域极化散射矩阵或者经傅里叶变换后的频域极化散射矩阵来表示。通过宽带极化对目标极化散射特性进行研究时,首先依据宽带雷达回波信号得到目标的全极化高分辨距离像(HRRP)信息,然后在此基础上对极化HRRP进行目标分解,对各散射中心的散射特性展开分析。
3.4 基于质阻比特征识别
质阻比是指飞行器质量与受到阻力的比值,可以认为是其质量在阻力面上的分布,从数学量化层面反映了飞行器的飞行效率。通常情况下,可以通过减小飞行器的迎风面积来提高质阻比,如对弹头目标进行流线型设计。
作为弹道导弹重要的突防装置,重诱饵在设计时外形通常与弹头一致,以表现出与弹头目标相似的弹道特性与反射特性。而考虑到弹道导弹助推的费效比问题,在弹道导弹载重受限的条件下,需尽可能减小除有效载荷外的重量,因此重诱饵的质量一般小于真弹头。弹道导弹目标再入大气层后,在大气阻力的过滤作用下,碎片、轻诱饵等目标急剧减速,只有弹头和重诱饵沿预定轨迹继续飞行,而此时弹头和重诱饵因其质量的不同表现出不同的质阻比特征,并且随再入高度的下降会产生不同的序列幅度起伏特征,可作为再入段识别弹头和重诱饵的重要手段。
3.5 基于一维距离像识别
目标的一维距离像实质上是目标上各距离单元沿雷达照射方向的散射强度分布图,能够精细反映目标的几何形状和结构特征。弹道导弹目标几何形状相对简单,强散射中心分布具有显著的识别特点,有利于通过一维距离像进行识别。
在基于一维距离像进行弹道导弹目标识别的过程中,由于弹道导弹目标飞行速度较快,其一维距离像会出现展宽、畸变、波峰分裂等现象,需对高速运动的弹道导弹目标进行速度补偿,速度补偿后可准确获得目标的一维距离像。在满足距离像高信噪比的条件下,可以通过所获得目标的一维距离像测算目标对应距离单元数,从而根据雷达带宽估计出目标的大概尺寸。
基于一维距离像的弹道导弹目标识别同时也存在一定局限性。由于弹道导弹目标在飞行过程中存在旋转、翻滚等一系列姿态变化现象,而目标的一维距离像具有较强的姿态敏感性,呈现出随姿态变化的特征多样性,因此对识别模板库的数据量提出了很高的要求,而弹头和各类突防装置的高分辨一维距离像特征保密程度较高,对于导弹防御方而言极难获取,给基于一维距离像的弹道导弹目标识别带来了困难。
3.6 基于ISAR成像识别
逆合成孔径雷达(ISAR)由合成孔径雷达(SAR)基础之上发展而来,其成像过程相当于SAR成像过程的逆过程,利用固定的雷达对运动目标成像,从中提取目标的二维结构特征,直观展示目标的形状、大小等信息。此外,还可以进一步对ISAR像进行特征提取,从而获取更多的目标细节信息。
在弹道导弹目标识别过程中,对于威胁目标群中飞行姿态较平稳的目标,其相对雷达的转角较小,ISAR成像期间目标的回波径向散布情况变化不大,运动补偿更易于实现。在运动补偿的基础上利用距离多普勒成像算法(RD)或距离瞬时多普勒成像算法(RID)对其进行处理,从而获得目标的最终ISAR像,开展基于ISAR成像的弹道导弹目标识别。
4 识别方法发展趋势
4.1 资源调度技术-综合多特征识别
弹道导弹目标具备多种特征,可表征多类信息。弹道导弹目标识别的发展应着眼于多元信息融合的思路,准确把握目标各类特征及其内在联系,通过对探测装备多种资源的合理调度,运用综合多特征识别手段融合各类目标信息,提高目标识别准确率。
综合多特征识别手段的运用对雷达装备的性能提出了更高的要求,既要兼顾多种目标特征的获取,同时也要满足各类特征测量的精度要求,在“质”与“量”上齐头并进。在雷达装备的研究设计中需要灵活运用资源调度、信息融合等各项技术,使雷达在探测目标时能够合理分配资源,获取目标的多种特征,同时对获取的多种目标特征进行客观评价、有效融合,避免偏差较大的目标特征对最终识别结果产生不良影响。
4.2 组网探测技术-多传感器融合识别
在弹道导弹打击行动中,导弹面向防御系统雷达的多类突防措施给单一传感器的探测带来了极大困难,在组网探测技术支撑下,多传感器融合识别手段的引入,可在空间分集性上充分发挥组网雷达体系探测的优势,实现目标探测的多源信息融合。多传感器融合识别手段的运用不仅能够获得对目标更为完全的描述,同时有效提高了弹道导弹防御系统的体系抗毁性,当部分传感器发生故障时,系统依然能够通过其他传感器的补充完成导弹防御作战任务。
4.3 人工智能技术-智能化识别
随着导弹突防技术和雷达探测技术的飞速发展,弹道导弹目标识别对象的类型日新月异、种类繁多,相应的反导预警雷达体制也呈多样化发展,使得目标识别特征库无法与武器装备发展相适应,难以建立精确而完备的弹道导弹目标特征库。而近年来人工智能技术的飞速发展,为解决此类问题提供了新思路。
为解决目标特征库不够精确的问题,需要提高弹道导弹目标识别的智能化水平,使其具有自适应调整的功能,依据探测数据不断调整优化特征库,使特征库更加匹配目标类型;而为解决目标特征库不够完备的问题,同样需要引入机器学习等智能化识别手段,使目标识别具有自主学习的功能,自动整合目标数据建立目标特征库,模拟人工方式对特征库进行维护。智能化识别手段的运用,将为弹道导弹目标识别创造无限可能。
5 结语
弹道导弹目标的识别工作就是将弹头从诱饵、碎片、弹体等非弹头目标中甄别出来,贯穿于来袭导弹飞行全时段、反导预警全链条。近年来,弹道导弹突防技术迅猛发展,将导弹防御作战推上了风口浪尖,对我弹道导弹防御系统的能力提出了新要求。为与之相适应,我们需要积极开展弹道导弹目标识别研究工作,在导弹发射、突防释放、诱饵伴飞甚至机动变轨等过程中遵循“去粗取精、去伪存真、递次筛选、持续识别”的原则,拓展目标识别维度,灵活运用多种识别手段,充分挖掘弹头与非弹头目标的特征差异,研究出一套高时敏、高置信度的弹头识别方法,助力导弹防御体系发展建设。
