空间距离特征约束点云检测算法
2022-05-25李云鹏杨大伟刘长宏
李云鹏,毛 琳,杨大伟,刘长宏
(大连民族大学 机电工程学院,辽宁 大连 116605)
赛道目标锥桶检测是中国大学生无人方程式大赛[1]的核心任务之一,锥桶检测算法的准确性直接决定上层无人系统的稳定性和方程式赛车的安全性。激光雷达具有点云测量精度高、稳定性强、可直接获取目标物三维坐标信息和反射强度等优点,因此在自动驾驶三维目标检测中应用广泛[2],但在无人驾驶方程式大赛中仍存在目标识别精度不足、准确率低等问题。
目前主流的三维点云目标检测算法可以划分为基于传统方法的目标检测和基于深度学习的目标检测。基于传统方法的目标检测算法主要有K-Means聚类算法[3]、基于密度的聚类方法[4]和欧式聚类目标检测算法[5],此类算法结构简单,检测速度较快,但检测精度不足且对于中远目标检测存在误检、漏检情况。基于深度学习的点云目标检测算法利用神经网络模型实现目标三维检测,主要算法有MV 3D[6]、Point R-CNN[7]、Point Net[8]和Voxel Net[9]等,基于深度学习的点云目标检测算法精度高、扩展性好,但复杂的网络结构占用大量计算资源,不适用于无人驾驶方程式赛车领域。
为解决无人驾驶方程式赛车目标检测精度不足造成的误检、漏检问题,本文提出一种基于空间距离特征约束的点云三维目标检测算法(Distance Based Cluster,DBC),通过自适应调整聚类参数实现不同序列锥桶的精确识别。DBC算法引入点云重构思想(Distance Based Voxel,DBV),加强被检测目标的特征信息,以距离特征约束重构空间点云,在保留关键信息的同时减少冗余点云数据,有效提升目标检测速度,降低传统点云目标检测的误检、漏检率。
1 三维目标检测算法
欧式聚类三维目标检测方法(Euclidean Clustering Detection, ECD)以点云之间的欧式距离为度量,通过固定聚类阈值对点云簇实现聚类分割。但由于激光雷达的回波特性,原始点云数据量巨大且在中远距离内呈发散结构,导致固定阈值的ECD检测算法在中远距离目标检测中精度较低。
DBC算法整体流程如图1。在ECD算法基础上引入空间距离特征,并增加数据预处理模块和目标锥桶判定准则模块。解决原始点云数据冗余问题,有利于聚类算法对关键点云簇的检测,进而提高聚类速度与精度,在保证无人驾驶方程式大赛中点云目标检测精度的同时提高检测速度。

图1 DBC算法整体流程图
1.1 数据预处理
针对无人驾驶方程式大赛环境感知任务中激光点云数据大量冗余,导致检测算法实时性不高的问题,本文引入数据预处理模块,提出DBV点云重构算法,以赛道锥桶与赛车之间的距离度量为约束对原始点云数据进行体素重构,降低干扰点云数据、突出目标特征、减小计算量从而提高算法运行速度以满足赛车实时性要求。DBV点云重构算法流程如图2。
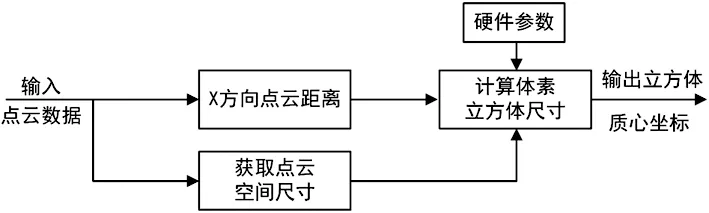
图2 DBV点云重构算法流程
预处理过程首先对原始点云提取感兴趣区域,以车前X轴正方向作为感兴趣区域进行检测,由于激光雷达硬件特性导致大量点云来自地面反射,通过RASANC算法[10]拟合地面模型,过滤地面点云减少干扰,以去除地面后的点云数据作为输入通过DBV算法实现点云重构。DBV算法以X轴方向的欧式距离为约束将点云空间划分为不同尺寸的体素立方体,用质心点替换立方体区域点云从而实现点云重构。


(1)
式中:d表示车前X轴方向距离度量;L、W、H代表目标障碍物的长、宽、高;f代表激光雷达采集帧率;F表示激光雷达采样率。通过式(1)计算不同欧氏距离下体素立方体尺寸R,分别取X、Y、Z三个维度中最大坐标值(Xmax,Ymax,Zmax)和最小坐标值(Xmix,Ymix,Zmix)并以边长为R的立方体为最小空间单元将点云空间划分为D个体素块:
(2)
对同一体素块内的点云标注相同索引h,并计算h内重心点坐标:
(3)
通过h内重心点替换立方体全部点云以实现点云重构。DBV可视化结果如图3。重构后的点云如图3b所示,点云数量由原始的120万减少到78万,点云数据量大大降低,有效减少冗余点云数据并保留目标点云的关键特征。

a) KITTI原始点云数据 b) DBV重构点云
1.2 关键点云检测
重构后的赛场数据保留了锥桶关键点云,但由于点云在空间中的无序性和离散性无法进行有效检测,通过DBC算法将点云数据模型以距离为准则聚集成多个同属性簇群以实现锥桶检测。


图4 构建三维k-d树

(4)
(5)

(6)
式中:di,j表示不同点云之间欧式距离;k表示聚类序列。若di,j不大于聚类阈值ε则分割为相同目标。
1.3 锥桶判定准则
在对点云数据进行聚类时不可避免地会发生误检现象,除目标锥桶外的人、车、物等不可预见性干扰都会对聚类结果产生影响,从而导致赛车路径规划出现偏差造成安全事故。针对这一问题,本文对聚类后的结果进行规则性约束,分别以聚类范围内点云数量、聚类拟合框尺寸和原始点云数据反射强度作为约束条件制定目标锥桶判断准则。
1.3.1 约束条件


表1 车前目标点云分布 m

(7)
(3)约束条件3。原始激光点云数据中包含激光反射强度信息Ii,其大小取决于目标物体的表面材质、光滑程度和颜色等因素,目标障碍物表面越光滑、颜色越浅其反射强度越高。赛道锥桶采用PVC材质且表面光滑、颜色较浅,与赛道周围环境差别较大,反射强度Ik远高于其他干扰目标。
1.3.2 判断准则
基于上述三类约束条件,总结目标锥桶判定准则,同时满足以下三条准则即可判定聚类目标为赛道锥桶目标。
(2)判断准则2:聚类拟合框尺寸(lk,hk,wk)满足世界坐标系下锥桶真实尺寸;
(3)判断准则3:聚类中心点云反射强度信息Ik满足100cd≤Ik≤150cd。
2 实验结果分析
2.1 实验设计
本算法依托于“民族之魂无人方程式赛车平台”,搭载镭神智能C32激光雷达,运行环境配置为超恩工控机Intel i5-8400、车规级NVIDIA1660显卡,操作系统系统为Ubuntu16.04,编程语言为C++,基于ROS Kinetic系统实现硬件驱动和算法适配封装工作。激光雷达以10 Hz频率采集环境信息并保存为Rosbag格式,激光雷达主要参数配置见表2。
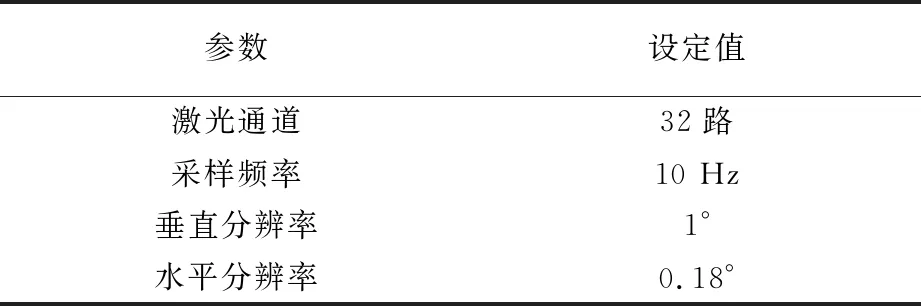
表2 激光雷达主要参数配置
数据集使用自动驾驶开源KITTI数据集,包含389对立体图像和光流图,39.2 km视觉测距序列以及超过200 k 3D标注物体的图像,验证数据集采用自制模拟赛道数据集,包括50 m直线加速赛道和50 m过弯赛道,共计10组,20个目标锥桶。本文使用特定交并比(Intersection Over Union,IoU)下的平均召回率(Average Recall,AR)作为算法性能评价指标。IoU值表示预测值与真实值之间的交并范围,IoU的值越大代表预测值越接近真实值,评价指标越严格。召回率是目标检测领域运用广泛的评价指标之一,其数学描述如式(8)。
(8)
式中:TP表示正样本预测为正类的样本数量;FN表示正样本被预测为负类的样本数量。设置IoU为0.7对ECD检测算法和DBC检测算法在KITTI数据集上的检测效果进行对比;设置IoU为0.5对ECD检测算法和DBC检测算法在模拟赛道数据集上的检测效果进行对比。
2.2 实验结果
以无人驾驶方程式赛车为实验平台,在KITTI数据集和模拟赛道数据集上进行了大量的实验测试,为更直观地比对说明,使用召回率作为评价指标记录和统计了在KITTI数据集和模拟赛道数据集上基准算法和DBC检测算法的消融对比实验结果,ECD算法和DBC算法在不同数据集中的召回率对比结果见表3。
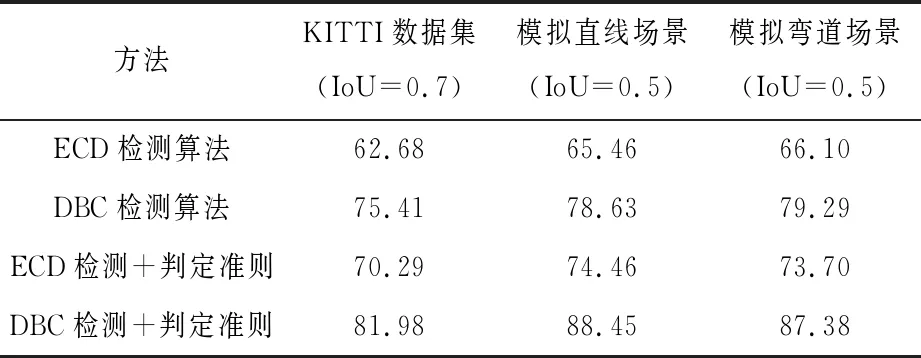
表3 三维目标检测算法对比 %
从表3实验数据可以看出,对比现有三维目标检测算法,本文提出的DBC检测算法对KITTI数据集和模拟赛道数据集的召回率均有明显提升。其中,在未加入判定准则前,DBC算法相对于基准检测算法平均召回率提高20.1%;在加入判定准则后,平均召回率提高32.7%。实验数据表明,在三维目标检测算法中,阈值参数ε对聚类分割结果影响显著,验证了通过引入空间距离特征实现自适应阈值参数调整的可行性及加入判定准则模块的必要性。
为更详细地说明本文所提出算法的有效性,将ECD检测算法和DBC检测算法在KITTI数据集和自制赛道数据集中的可视化结果进行对比分析。ECD算法和DBC算法检测结果对比如图5,行(1)为KITTI数据集,行(2)为模拟弯道数据集,行(3)为模拟直线赛道数据集。

图5 ECD算法与DBC算法检测结果对比
原始数据冗余信息过多,关键点云特征被稀释导致聚类算法精度降低,通过DBV算法对原始数据进行点云重构,有效降低干扰点云数据量,增强关键点云特征信息,重构后的点云作为输入对ECD检测算法和DBC检测算法进行对比实验。在KITTI数据集中,ECD算法对中远距离下道路两旁行人和车辆等目标检测准确率较低并出现漏检。本文算法相对于基准算法在中远距离下表现更好,能够更为精细地检测出道路两旁建筑和行人,有效避免漏检问题。在模拟直线和弯道数据集中,基准算法在中远距离下检测精度不高,对目标锥桶定位不准确,本文所提算法对中远距离下的目标锥桶都具有较好的检测精度,能够精确识别全距离下目标锥桶,解决误检、漏检问题并输出赛道锥桶激光雷达坐标系下空间三维坐标,简洁、高效地完成无人方程式赛车环境感知任务,为赛车路径规划提供必要保障。
为验证本文方法的实时性,对算法运行时间进行比较,运行时间对比见表4。在检测精度明显提升的情况下,DBC目标检测算法运行时间与基准算法运行时间相差不多。经仿真实验表明,DBC检测算法相比于基准算法在无人方程式大赛中目标锥桶检测精度上有较大提升,同时满足赛车实时性的要求。
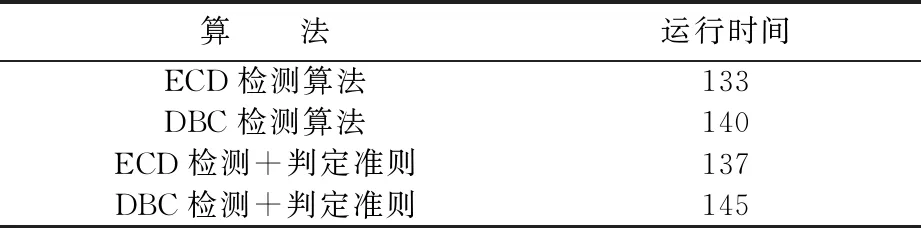
表4 运行时间对比 /ms
3 结 语
针对中国大学生无人方程式大赛环境感知任务中,现存检测算法在点云目标检测中精度低、中远距离易出现误检漏检的问题,为确保无人赛车规划、控制工作顺利展开,本文提出DBC点云目标检测算法,将空间距离特征作为DBV点云重构和聚类条件,引入锥桶判断准则,节省赛车上位机计算资源的同时增强关键点云特征信息,提高目标锥桶检测精度,使其更好地应用于无人驾驶方程式赛车。后续工作中,在满足算法精度的同时将进一步提高算法检测速度,提升赛车最高时速。