基于Beta过程的高分辨ISAR成像
2022-05-23徐安林
徐安林, 张 毓, 周 峰
(1. 中国人民解放军63921部队, 北京 100094; 2. 西安电子科技大学电子工程学院, 陕西 西安 710071)
0 引 言
逆合成孔径雷达(inverse synthetic aperture radar,ISAR)能够全天时、全天候地提供飞机和卫星等非合作目标的高分辨二维图像,并从中获取其尺寸、结构等形状特征及运动特征[1]。因此,高分辨ISAR成像在空间目标监视与弹道目标防御中发挥着重要作用[2]。
在ISAR观测中,通过发射大时宽-带宽积信号及脉冲压缩技术即可获得较高的距离分辨率,而方位高分辨则需要通过方位向的长时间相干积累实现。然而在实际情况中,ISAR往往面临着非常复杂的环境,导致无法对目标进行长时间连续观测,从而产生方位缺损。同时,受到强噪声或干扰的影响,目标的回波通常存在低信噪比的问题。此外,由于传统平动补偿中的自聚焦方法精度不足,并且信号传输过程中会受到大气影响,目标回波中往往存在着随机相位误差[3]。面对上述情况,传统成像方法的性能会迅速下降甚至失效。因此,迫切需要研究适用于复杂观测环境的高分辨ISAR成像方法。
在光学区,目标满足点散射模型,其ISAR像在距离域和方位域具有稀疏性。因此,可以利用稀疏信号重构方法实现复杂观测环境下的高分辨ISAR成像[4-7]。这类方法首先构建稀疏观测模型,进而利用数值优化或贝叶斯方法从低维回波信号中重构出目标散射点分布。现有基于数值优化的求解方法虽然计算量较小,但在低信噪比情况下成像结果存在散焦[8-12]。传统参数化贝叶斯方法[13-17]往往根据现有经验来选取先验分布,导致其数据描述的灵活性弱,重构误差较大。而非参数贝叶斯方法将随机过程作为模型的先验分布,使得其参数空间能够随观测数据变化,从而获得比参数化贝叶斯方法更高的灵活性,为解决稀疏信号的准确重构问题提供了新思路。
本文提出一种基于非参数贝叶斯的ISAR高分辨成像方法。该方法首先引入Beta过程非参数先验构建概率图模型,并通过Gibbs采样求解模型的后验分布,同时利用最大似然方法估计相位误差,进而实现低信噪比、稀疏孔径等复杂观测环境下的高分辨聚焦成像。实验结果表明,该方法能够在复杂观测环境下获得优于现有典型数值优化方法及参数化稀疏贝叶斯重构方法的成像结果。
1 信号模型
1.1 信号建模
对于平稳运动的小转角目标[18],其散射点的瞬时斜距可以表示为ΔRk(tm)≈xkωrottm+yk[19],其中ωrot表示目标旋转角速度,xk和yk分别表示第k个散射点的横坐标和纵坐标,tm表示慢时间。
令距离脉压后的回波矩阵为Y∈CNa×Nr,其中Na表示方位单元数,Nr表示距离单元数。同时,假设每个距离单元的回波相互独立,考虑到随机相位误差的距离不变性,则第n个距离单元回波s(m)满足:
(1)
式中:n∈[1,Nr];m为方位单元序号;k∈[1,K]表示散射点的序号;Ak表示散射点k的幅度,且Aka=Akexp(-j4πyk/λ),ar(yk)表示与yk有关的sinc波形函数;exp(jφm)表示随慢时间变化的随机相位误差;ωk=-2xkωrot/(λ·PRF)表示第k个散射点的多普勒,PRF为脉冲重复频率,λ为波长;ε(tm)为加性噪声。
当回波存在缺损时,令可观测回波序号为ma,且可观测回波数为Ma。对于第n个距离单元,其稀疏观测模型可表示为
ya=EaAaxa+εa
(2)
式中:ya=[s(ma1),s(ma2),…,s(maMa)]T表示可观测回波向量;Ea=diag{exp(jφma1),exp(jφma2),…,exp(jφmaMa)}表示相位误差矩阵;xa表示待重构的方位像;εa为噪声向量;Aa∈CMa×Da表示过冗余字典,且其第i行可以表示为
Ai·=exp(j2πωdamai),i∈[1,Ma];da∈[1,Da]
(3)
式中:Da表示构建的多普勒网格数。当Ma≤Da时可实现超分辨成像。
重新在实数域定义信号模型得到:
y=Φω+ε
(4)
1.2 概率建模
为了充分利用散射中心的稀疏特性,引入Beta过程非参数贝叶斯先验[20]。若随机测度H服从参数为a、b和H0的Beta过程,那么H可由下式表示:
(5)
并记作H~BP(αH0),其中K→∞,delta函数δBk(B)当且仅当B=Bk时为1;否则为0。同时,每一个独立同分布地从概率测度H0中生成的原子Bk都有一个权值πk与之对应。
若某个无限维的二值列向量z的第k个元素zk服从Bernoulli分布:
zk~Bernoulli(πk)
(6)
那么新的测度,X(B)=∑kzkδBk(B)则由参数为H的Bernoulli过程产生,记作X~BeP(H)。
在式(4)所示的稀疏信号重构问题中,y∈RP表示实数域有效回波向量,Φ∈RP×K表示实数域多普勒字典,权向量ω∈RK即为实数域待重构方位像。首先,将权向量ω分解为两个向量元素相乘的形式,即
y=Φ(s∘z)+ε
(7)
式中:∘表示向量的哈达玛积。可以看出,ω的稀疏性由二值向量z决定,且其幅值由向量s决定。本文利用Beta过程获取稀疏二值向量z。
令二值向量z的先验分布满足Bernoulli分布,即
zk~Bernoulli(πk)
(8)
且参数πk服从如下的Beta分布:
(9)

此外,给幅度向量s和噪声向量ε引入高斯先验:
(10)
(11)
为了使模型更加灵活,再对s和ε的精度参数γs和γε引入Gamma分布先验:
γs~Gamma(c,d)
(12)
γε~Gamma(e,f)
(13)
根据上述概率建模,基于Beta过程线性回归(Beta process linear regression, BPLR)的层级概率模型可以表示为
(14)
其对应的概率图模型如图1所示。
2 模型求解及分析
由于各距离单元对应的方位像及相位误差矩阵均未知,因此本文利用循环迭代的方法进行优化求解。首先通过Gibbs采样算法求得待重构的稀疏方位像,再通过最大似然方法估计相位误差。交替进行上述两个步骤,直到满足收敛条件。
2.1 基于Gibbs采样的方位像估计
分别对模型各参数进行采样。
(1) 对z=[z1,z2,…,zK]采样,令Φ=(φ1,φ2,…,φK),其中zk后验分布为Bernoulli分布:
(15)
(16)
p0=1-πk
(17)
(2) 对sk=[s1,s2,…,sK]采样,其中sk服从高斯分布:
(18)
方差Σsk和均值μsk可以表示为
(19)
(20)
(3) 对πk采样,πk服从Beta分布:
(21)
(4) 对γs采样,γs服从Gamma分布:
(22)
(5) 对γε采样,γε同样服从Gamma分布:
(23)
2.2 超参数设置
由前文公式的推导可以看出,Gibbs采样的结果依赖于超参数a、b的设置。因此,分别定义超参数a、b:
(24)
(25)

2.3 相位误差估计
在完成所有距离单元的方位像重构后,即可获得本次迭代的ISAR图像X。在此基础上,给有效回波矩阵Y0∈CMa×Nr的每一列引入相互独立的多维复高斯分布,可得
(26)
式中:Y·r和X·r分别表示Y0和X的第r列。
精度α0服从如下的Gamma分布:
p(α0)=Gamma(α0|v1,v2)
(27)
Ea的似然函数为
(28)
通过最小化负对数似然函数,可得Ea的估计值为
(29)
(30)
式中:Yi·和Ai·分别表示Y0和A的第i行。
2.4 算法流程
交替进行方位像估计和相位误差估计,直到收敛。特别地,将收敛条件定义为
(31)
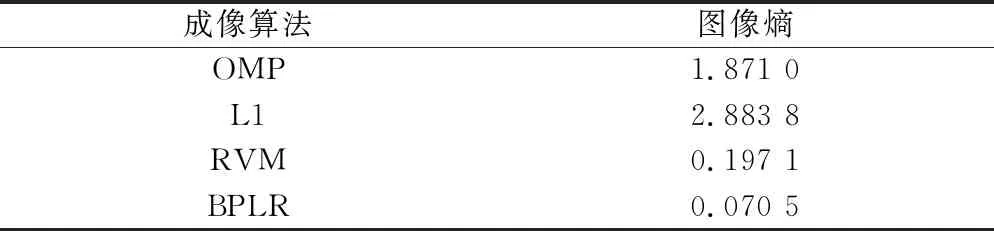
最终,基于Beta过程的高分辨ISAR成像流程图如图2所示,其中T表示采样次数。在算法初始化的步骤中,设置相位误差矩阵Ea为单位阵,二值向量z为全零向量;对s的元素进行随机初始化,并将π设为较小的值。同时,将超参数c、d、e和f设为10-4,S和F的初始值满足1 本节首先进行蒙特卡罗实验,对所提算法重构的准确性以及对于噪声的稳健性进行分析。然后利用YAK-42飞机实测数据的成像结果验证所提算法的有效性 本节通过一维稀疏信号重构实验将所提算法的性能与正交匹配追踪(orthogonal matching pursuit, OMP),L1范数优化[21],基于变分推断(variational inference, VI)的相关向量机(relevance vector machine, RVM),即RVM-VI进行比较。其中,前两种方法为典型数值优化方法,RVM为典型的参数化稀疏贝叶斯学习方法,该方法采用Gamma-Gaussian先验进行稀疏建模。 (32) 由图3(b)可以看出,随着信噪比增大,4种算法重构误差逐渐减小,并且在所有信噪比下,所提方法均能获得最小的重构误差,其次是RVM、L1范数优化方法以及OMP方法。由于稀疏贝叶斯学习方法通过引入概率分布获得了高阶统计信息,因此其重构误差明显小于OMP、L1范数优化等典型的数值优化方法。同时,由于Beta过程先验能够根据数据特性自适应调整参数空间,从而获得比RVM等参数化贝叶斯方法更高的灵活性[22],因此其重构误差最小。 本节分别采用存在随机相位误差的YAK-42飞机稀疏孔径及短孔径实测数据验证所提算法有效性。 稀疏孔径数据如图4(a)所示,回波距离和方位向采样点数分别为256和512,信噪比为-3 dB,回波方位缺损率为50%。各算法成像结果如图4(b)~图4(e)所示。由图可知,OMP、L1范数优化等数值优化方法无法有效抑制噪声,虽然基于RVM的成像结果虚假点较少,但目标轮廓不够清晰。所提方法的成像结果背景干净且聚焦良好。 表1给出了4种算法稀疏孔径成像结果的图像熵。可以看出,所提方法的ISAR图像熵最小,表示其聚焦效果最优。 表1 稀疏孔径不同算法的图像熵 对于短孔径数据,目标有效回波所占方位单元数为200,回波缺损率61%,信噪比为-3 dB。各算法成像结果如图5(b)~图5(e)所示。 由图5可知,OMP、L1范数优化等数值优化方法对应图像包含较多虚假点,同时RVM的成像结果目标轮廓不够清晰。而所提方法成像结果背景干净且聚焦良好。4种算法在短孔径情况下的图像熵如表2所示,对比可知所提方法的ISAR像熵最小,聚焦效果最优。 表2 短孔径不同算法的图像熵 本文提出基于Beta过程的高分辨ISAR成像方法。该方法首先将高分辨成像问题转化为稀疏信号重构问题,进而通过引入Beta过程先验构建层级概率模型。在此基础上,交替利用Gibbs采样算法求得稀疏方位像并利用最大似然方法估计随机相位误差,最终得到聚焦良好的高分辨ISAR像。实验结果证明在低信噪比、稀疏孔径、短孔径等复杂观测条件下,所提算法性能优于现有成像方法。 未来将构建更灵活的概率模型,并寻找高效的模型求解方法。同时研究存在强干扰等复杂环境中机动目标的高分辨成像方法。3 实验及分析
3.1 蒙特卡罗实验


3.2 实测数据成像结果

4 结 论