智能图书分类机器人的设计
2022-05-23朱春林郭亚琴郁飞飞李继涛毛雨孙阜中
朱春林 郭亚琴 郁飞飞 李继涛 毛雨 孙阜中
(南通理工学院电气与能源工程学院,江苏南通 226002)
1 引言
目前国内图书分类系统运用的比较少,只有为数不多的几家国家大型图书馆使用图书分类机器,但是这些设备都是大型设备,并不适用于小型图书馆或者校图书馆。本文以图书分类机器人为研究对象,提供一种更加自动化、数字化、智能化、分类效率更高的分拣装置。该装置主要包括扫描模块、传动模块、分拣模块、PLC 模块。该装置可以自动识别图书的类型从而对其进行归整分类,能够高效率地自动整理图书,有效地降低人为分类图书的错误率。
2 设计分析
该机器人具有图书还书自动分类和图书整理上架两大功能。机器人通过采用RFID 技术自动识别图书上张贴的条形码完成数据读取,通过传动模块和分拣模块实现对书籍自动分类,该机器人可对分拣后的书籍实现高效快速的书籍收集整理上架,真正替代人工还书和书籍整理工作。
系统总体设计框图如图1 所示。该装置主要包括:检测模块、可编程控制器、分拣模块、收集模块和报警模块。检测模块包括条形码扫描器与红外传感器,从而对图书进行分类;可编程控制器处理信号;分拣模块主要将图书进行分拣,通过PLC 处理信号对电动伸缩杆进行控制;收集模块将分拣后的图书进行收集;报警模块在当图书收集量达到百分之八十时,收集装置会自动的报警提示。
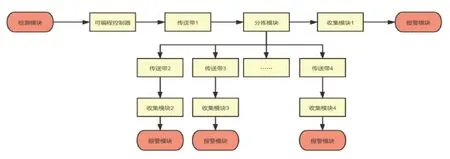
图1 系统总体框图
3 系统设计
图书管理员将书籍以书籍条码一面朝上的放置方式放置于传送带上,智能图书分类机器人的重力传感器感应到有书籍置于传送带并启动运行传送带使书籍进入自动扫码区域,位于自动扫码区域侧边的红外传感器将测量书籍厚度,位于自动扫码区域上方的扫码枪识别书籍代码,与源数据比对确定书籍所在类目并将信号传递给一个带有时间继电器的推板中,自动扫描区域模型。
在书籍扫描完成后,智能图书分类机器人会利用差速传送带将书籍错开并快速传递到分拣区,并由推板将书籍推入所在类别的通道,当收集装置在收到一本书籍后,会以前面测量的书籍厚度为标准自动下降一定的高度从而保证下一本书籍的顺利堆叠,分拣装置。
当收集装置检测到即将达到堆叠上限后会先发出报警信号给图书管理员并在达到堆叠上限后停止该分类通道的运行,若之后还有该通道的书籍传送将自动送至传送带末端的收集箱内,在图书管理员收到报警信号后对分类收集好的书籍进行处理之后,该通道将重新运行。对于不在录入系统的书籍进入机器时,也将自动传送至末端的收集箱。智能图书分类机器人在重力传感器未收集到传送带上有物品的信号30秒后将会自动停止运行。书籍收集箱如图2所示。
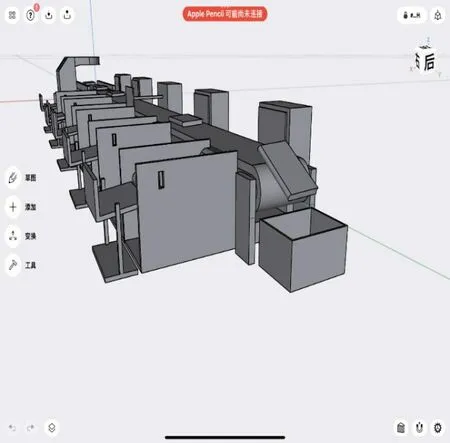
图2 智能图书分类机器人收集箱
4 组态MCGS设计
人机界面主要将计算机和机器进行通信。智能图书分类机器人通过MCGS软件实现人机数据交换。智能图书分类机器人的组态画面如图3 所示。双击“智能图书分类机器人”用户窗口,运行该软件,并将PLC 与该软件进行联调,通过对该系统进行调试,该系统能够实现所要求的功能。
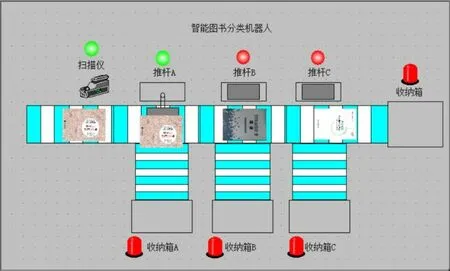
图3 智能图书分类机器人组态画面
5 总结
该智能图书机器人具有结构简单、操作便捷、分拣速度快、收集效率高等特点,该设备可以将书籍按照预先设定好的分类方法进行自动分类,分类的效率能达到人工分类效率的多倍,且图书分类的出错率也将降到最低。不仅如此,完成书籍的分类后,还可以自动将图书进行整理、上架,并且要求设备运行时不会对书籍有任何的磨损,使书籍能最大限度的被多次循环利用。该设备没有工作时间和工作条件的限制,并且可以根据需要持续不间断的工作,其工作效率远大于人工效率,因此,可以极大地节省人力成本。该设备的价格相对较低,并且不易损坏,只需后期的简单维护,便可保证其长久运行,无论从何种角度考虑,都要比人工更加经济实惠。且此设备并不会像大型图书馆的图书分类设备那样需要占用很大的空间,它所需要的空间较小且方便安装,只需安装在还书柜台的下方即可,大大节省了空间,提高了图书馆的空间利用率。故此装置具有比较好的应用前景。