道路约束下多传感器协同地面目标跟踪的管理方法
2022-05-21张昀普单甘霖
张昀普,单甘霖
(陆军工程大学石家庄校区电子与光学工程系,河北石家庄 050003)
0 引言
随着科学技术的发展,网络战、电子战和信息战等新型作战形式已逐渐成为现代战争的主流,战场环境也随之变得复杂多变,这也对多传感器系统的有效使用提出了更高的要求。在实际战场上,传感器系统所获取的信息形式多样,数据量巨大,加之对信息处理速度的实时性要求越来越高,如何运用合理的传感器管理方法以获取最大的作战效益,已经成为国内外学者的研究热点。
目前,传感器管理的研究重点均放在了基于贝叶斯最优的管理方法上,即设定一个或多个与作战指标相关的目标函数,通过求取目标函数的最优解以获取最佳管理方案,按照指标种类的不同,可分为3类方法:基于信息论的管理方法、基于风险论的管理方法和基于任务论的管理方法。基于信息论的管理方法以信息指标最优为管理准则,可通过传感器管理使观测一次前后的信息增益达到最大,常用的指标有Renyi增量、K-L散度和交叉熵等。但文献[6]指出,该类方法的缺点是指标过于抽象化和理论化,与具体任务需要关联不紧密,致使指挥员可能不理解这些指标的意义。基于风险论的管理方法主要用于传感器资源稀缺的场景中,该方法的目的是通过设置与决策风险相关的目标函数来最小化风险带来的损失,而不是一味追求传感器观测性能的最佳。常用的风险指标有威胁评估风险、目标丢失风险和检测误判风险等。基于任务论的管理方法主要面向不同的任务需求,结合具体的任务指标制定相应的传感器管理准则,常用的指标有目标跟踪精度、目标检测概率和目标识别概率等。该类方法相比于前两类方法更贴合任务实际需求,且运用场景更为广泛。
在基于任务论的传感器管理方法中,面向目标跟踪任务的研究最为普遍,在现有相关文献中,大多都是针对空中目标进行研究,目标的运动区域无约束。但在实际侦察任务中,通常也会存在地面目标,这些目标往往速度较慢、机动性大,且运动时往往会受到地形遮蔽或者道路约束,因此其运动建模和跟踪准则也与无约束目标不同,传感器管理的方法也会相应改变。同时,陆战场侦察雷达常采用脉冲多普勒体制,为了减少杂波对观测的影响,其会设定一个最小可检测径向速度(MDV),小于MDV的目标将落入雷达的多普勒盲区,从而无法被探测。
此外,在现代战场上,传感器侦察对抗设备已广泛应用于车载或机载平台上,其可通过辐射接收机截获有源传感器的辐射信号,从而达到对传感器的定位和打击。因此,需要在执行任务的同时控制传感器系统的辐射,以提高其生存能力,而合理量化传感器辐射状态是控制辐射的前提。文献[19]将传感器使用一次的辐射量设为固定常数,但其没有考虑传感器连续工作时辐射量会非线性增长,同时也未建立传感器工作参数与辐射状态的数学关系,不符合实际。文献[20]利用传感器和敌方接收机的工作参数计算出施里海尔截获因子,以此量化传感器的辐射状态;文献[21]通过设定在时间域上的多个截获窗口函数,计算出传感器辐射被截获概率。但上述文献所用方法均未考虑传感器之间的差异性,即在有限传感器资源下,战术价值更高、性能更好的传感器更需要优先控制辐射。
针对上述问题,本文面向道路约束条件下的地面目标跟踪问题,在考虑多普勒盲区的情况下,结合传感器系统的跟踪性能和辐射损失控制两种作战需求,制定相应的传感器管理方法。首先建立了基于部分可观马尔可夫决策过程(POMDP)的传感器管理模型,提出以目标跟踪精度和传感器辐射损失的加权和最小为管理准则。然后给出道路约束下目标状态估计方法和多普勒盲区下的目标预测状态修正方法。此外,考虑传感器信号被敌方截获后的损失,在文献[21]基础上,结合传感器被截获后的损失代价,构建传感器截获损失模型,并设计一种莱维飞行-樽海鞘群算法(LF-SSA)对传感器管理方案进行优化求解,最后进行了仿真实验。
1 基于POMDP的传感器管理模型
假设我方共用个传感器跟踪个在道路上行驶的敌方目标,传感器系统采用集中式结构。在时刻,控制中心计算得到下一时刻的最佳工作方案。为方便下文表述,做出以下3点说明:
1)本文所提传感器为有源传感器,且在整个任务过程中位置和结构不发生改变。
2)假设我方已通过地理信息系统获取道路网的相关地理信息。
3)本文研究的管理方法为长期管理中的开环反馈方法,指系统通过预测未来一段时间内的总收益制定下一时刻的管理方案。
由于本文所研究的传感器管理问题属于不确定性环境下的随机决策问题,因此可以基于POMDP标准框架进行建模,其可由6要素组成:行动空间、状态空间、状态转移律、观测空间、观测律和目标函数。
1.1 行动空间
行动空间代表着传感器系统在每时刻的自由度,在本文中即为每时刻传感器系统的工作方案,用×维矩阵A =(A)表示,其中A的值为1或0,分别表示在时刻是否开启传感器跟踪目标。同时,设定矩阵组A =[A ,A ,…,A ]表示在时间步长为的时域[,+-1]上的管理方案。
本文不考虑不同传感器的观测数据融合,因此设定:同一时刻每个目标仅能被一部传感器跟踪;同一时刻每个传感器可同时跟踪一个或多个目标,但不能超过其最大跟踪能力C。因此,行动空间的约束可表述为
1.2 状态空间及状态转移律

目标的状态转移律可结合目标动态模型表示,即


1.3 观测空间及观测律

传感器的观测律可结合观测方程表示,即





式中:(·)表示事件发生的概率。



1.4 目标函数
传感器管理的核心是通过预测未来时刻内的不同动作A (即管理方案)所对应的收益值,找到使收益达到最佳的动作。本文考虑目标跟踪任务实际,以目标跟踪精度和传感器截获损失的加权和为收益衡量指标,建立如下目标函数:

式中:为平衡系数;(A )和(A )分别表示执行管理方案A 后在时域[,+-1]上目标跟踪精度总值和传感器截获损失总值,具体计算方法将在下文详述。
2 道路约束下地面目标跟踪模型
2.1 路段建模
当目标在道路上运动时,会沿着由道路拓扑确定的路段行驶,这些路段的信息可以从地理信息系统中收集,并利用相关信息建立道路网的数学模型。将非线性的道路网以多个直线路段的连接来表示,如图1所示。
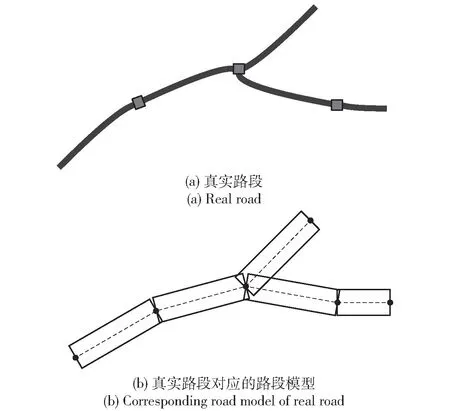
图1 路段建模示意图Fig.1 Schematic diagram of road modeling
在道路上持续运动的目标,可认为其沿着道路中心线运动,且基本不会在垂直于道路中心线的方向有较大偏离。因此,若目标在起点为(,)、终点为(,)的路段上运动,则其状态约束为
式中:为路段方向的正交矢量;、和为路段方程系数,
用矩阵形式表示(8)式:
2.2 路段判断

式中:ℑ表示马氏距离检验门限,服从自由度为2的卡方分布。若(12)式成立,则接受Ω,认为目标在该路段上;若存在多个路段满足(12)式,则选取与目标状态估计值马氏距离最小的路段为当前路段。
在确定路段后,可对目标状态估计值进行修正,使其投影到对应路段上,在此选取与目标状态估计值马氏距离最小的投影点作为道路信息点,其修正状态估计值为

式中:为误差矩阵,与道路宽度正相关。
对应的协方差矩阵值为

2.3 道路约束下的目标运动模型

图2 目标运动方向示意图Fig.2 Schematic diagram of target movement direction



2.4 基于变结构多模型法(VSMM)的目标状态估计方法
当目标切换所在路段时,其运动方向将会改变,若按照原路段的模型信息进行外推估计,则会影响估计精度,甚至造成路段判断错误。同时,在单一路段上运动的目标,其运动方向受限,可基于单一运动模型进行滤波估计,但当目标遇到路口时,其可能会运动到任意一个分路上,机动性大幅增加。
因此,在道路约束的情况下,需要基于多个运动模型对目标状态进行估计。相较于固定多模型法,VSMM通过实时更改模型集减少了运算时间,更符合传感器管理实时性要求,因此本文将基于VSMM对目标状态进行估计。

图3 路口示意图Fig.3 Schematic diagram of intersection
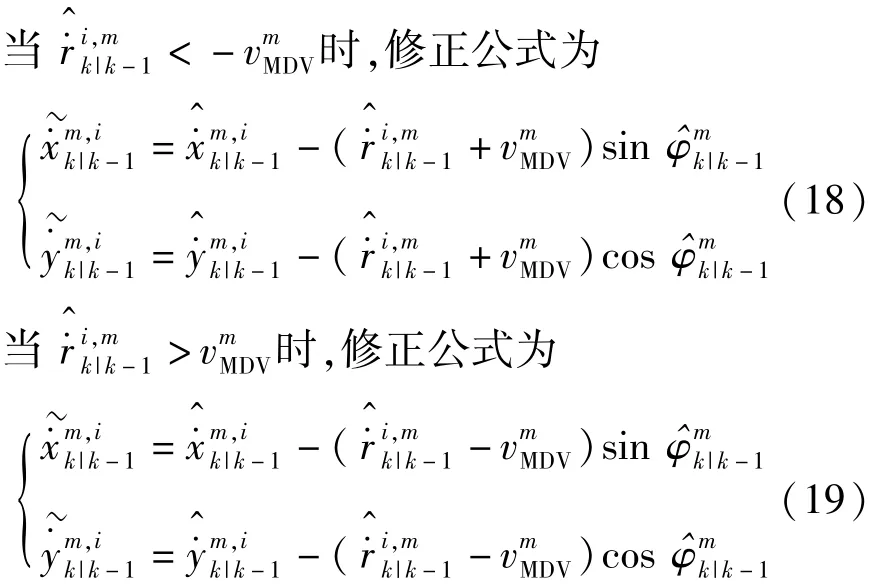
2.5 多普勒盲区下目标预测状态修正方法

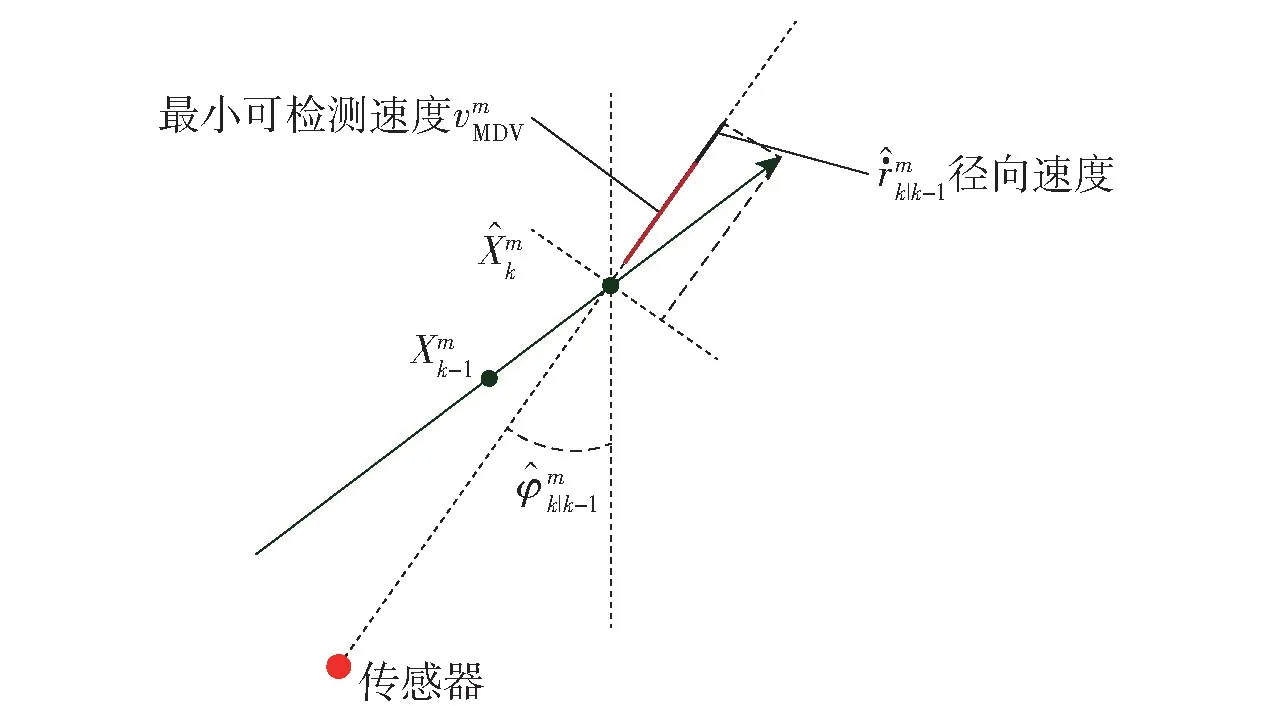
图4 多普勒盲区状态修正示意图Fig.4 Schematic diagram of target state correction in Doppler blind zone
首先根据卡尔曼滤波的基本公式,得到时刻模型下目标的预测状态和协方差阵:

2.6 道路约束下目标跟踪精度预测方法
由(7)式可知,在传感器管理过程中需对未来目标跟踪精度进行预测,本文引入目标预测状态对应的克拉美罗下界(PCRLB)衡量未来时刻的跟踪精度,并以其迹的位置信息量化跟踪精度,计算公式为


结合传感器的管理方案A 和道路约束下目标跟踪模型,时域[,+-1]内的目标跟踪精度预测步骤如下。
1 初始化,令=1。


6 根据(20)式计算目标跟踪精度J(A )。
7 若=,则循环结束;否则,令=+1,转步骤2。
3 传感器截获损失模型
传感器的辐射信号能否被对方截获是一个不确定性事件,可用传感器被截获概率进行描述。文献[21]指出,在传感器辐射过程中,只有当多个窗口函数在时域上同时发生重合,辐射才会被截获。
结合本文研究内容,考虑以下3个窗口函数:
依据上述窗口函数,传感器跟踪目标时辐射被截获概率为



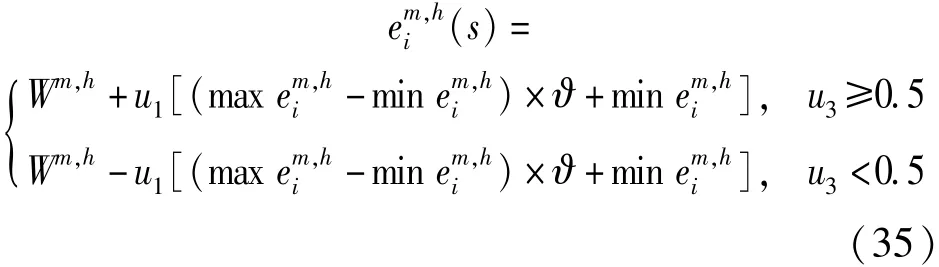
在传感器被截获后,就有可能被敌方打击,从而造成相应的损失。但在实际战场上,不同传感器的重要度也不一样,重要度更高的传感器被打击后所造成的损失也就更大。一般情况下,传感器的重要度主要体现在性能、战术价值和造价成本等方面,基于此,本文构建一个多指标重要度评价函数,用以区分不同传感器的差异性如下:


传感器的截获损失即为其被截获概率和重要度之积,表示截获事件发生后造成的潜在损失,具体表示为

由此可以看出,传感器连续工作时间越长,其被截获概率就越高,潜在损失就越大,因此需要通过传感器管理来控制单传感器的工作时间。
根据(24)式,结合传感器管理方案A ,则传感器系统在时域[,+-1]的总截获损失可表示为
4 基于LF-SSA的优化求解
4.1 求解分析
结合(7)式、(20)式和(25)式,可进一步将目标函数写为
由(26)式可知本文所提传感器管理问题是一个多维数的POMDP问题,解空间过于庞大,计算复杂度过高,为了满足作战时实时决策的要求,提高寻优速度和质量,本文设计了LF-SSA以快速求解。
4.2 传统SSA
SSA由Mirjalil在2017年提出,它是一种模仿海洋生物樽海鞘习性的智能算法。该算法的控制参数较少,具有计算量小、局部搜索能力强的优点,能有效解决单目标优化问题。
樽海鞘群在移动时会形成樽海鞘链,链中的樽海鞘分为领导者和追随者,领导者处于链首,对环境有着最优判断,其他个体为追随者。SSA利用了樽海鞘链的特性,通过更新领导者和追随者的位置进行寻优。
设定SSA中樽海鞘的种群数量为,则可建立一个维数为××的种群位置空间,对于种群中的第个樽海鞘(1≤≤),可将其位置表示为

在每轮寻优迭代中,先将E 作为自变量代入目标函数,计算出对应的函数值,此数值可视为樽海鞘对环境的适应度。适应度最佳的樽海鞘所处位置被视为食物源的位置,然后可通过更新公式对樽海鞘的位置进一步更新。
领导者的位置更新公式如下:



式中:为最大迭代次数。
追随者呈链状顺次跟随移动,其位置更新公式可表示为

4.3 LF-SSA
SSA在位置更新时,领导者的位置决定了整个樽海鞘链的位置更新,如果领导者的位置在更新时不能跳出局部最优,会使算法的收敛精度不理想。因此,本文引入LF策略,它是一种服从莱维分布的随机搜索方法,在搜索时将短距离搜索和偶尔长距离搜索相结合,可以确保SSA的搜索域多样化,提高其全局搜索能力。
LF的轨迹满足:

式中:为步长;evy()表示移动步长的概率;l为参数变量。
由于莱维分布过于复杂,目前常使用文献[28]提出的模拟方法来计算LF步长,具体为


式中:Γ(·)表示gamma函数。
利用LF步长更新领导者位置,可提高领导者的移动能力,从而提高整个樽海鞘链对食物源的搜索能力,将(29)式改写为
综上所述,LF-SSA的具体求解流程如下。
1 种群初始化。根据传感器数量、目标数量、决策步长和种群数量,随机生成一个樽海鞘种群。根据(26)式,计算各樽海鞘所对应的适应度值,并将最小值所对应的樽海鞘位置设定为食物源的位置,准备算法迭代。
2 更新领导者位置。根据(35)式对领导者的位置进行更新。
3 更新追随者位置。根据(31)式对追随者的位置进行更新。
4 食物源更新。对每一维的值进行边界处理,根据(26)式,计算位置更新后樽海鞘所对应的适应度值,若更新后樽海鞘种群的最小适应度值优于原值,则更新最优适应度值,并将对应樽海鞘位置作为新的食物源位置。
若迭代未达到所设的的最大次数, 则进入下一轮迭代,重复步骤2~步骤4;否则,算法终止,输出此时的食物位置,其结果即为最佳管理方案。
4.4 算法的时间复杂度及收敛性分析
算法的时间复杂度影响算法的运算效率,是关乎算法性能的重要因素,本文借鉴文献[29]的思想,对LF-SSA的时间复杂度进行分析。
在传统SSA中,可分为初始化、领导者位置更新、追随者位置更新和食物源更新4个阶段。初始化阶段,种群数为,维度为×,设定参数设置的时间为,在每一维上产生随机数的时间为,求适应度值的时间为(),排序并找出最优适应度及种群的时间为,因此初始化阶段的时间复杂度为

在算法迭代的领导者位置更新阶段,设定领导者的数量为2(数量大小对时间复杂度无影响),生成的时间为,在同一轮迭代时的值不变,即一轮迭代仅需生成一次。和为均匀分布的随机数,与不同,二者在同一轮迭代时,不同维对应的值均不同,生成二者的时间均可视为与一致,利用领导者位置更新公式进行更新的时间为。因此,领导者位置更新阶段的时间复杂度为

在追随者位置更新阶段,设利用追随者位置更新公式进行更新的时间为,因此追随着者位置更新阶段的时间复杂度为

在食物源更新阶段,设定每一维取值边界处理的时间为,计算适应度值的时间仍为(),排序并找到最佳结果、更新食物源的时间为,则食物源更新阶段的时间复杂度为

因此,SSA的总时间复杂度为

LF-SSA与SSA的差异体现在领导者位置更新阶段,利用莱维飞行轨迹代替随机数对位置进行更新,其主要计算量在于两个正态分布随机数和的获取,而由于l=1.5,正态分布的标准差已知,故莱维步长计算开销很小,可将其设为,则LF-SSA中领导者位置更新阶段的时间复杂度为

因此,LF-SSA的总时间复杂度为

综上所述,与SSA相比,LF-SSA没有增加时间复杂度,运算效率不会下降。

5 仿真实验
5.1 仿真参数
设定5部传感器跟踪2个在道路网中匀速运动的目标,道路网及目标运动轨迹如图5所示,各路段起始点的坐标为:(0 km,0 km)、(0 km,1 km)、(1 km,1 km)、(0 km,2.2 km)、(1.8 km,2.9 km)、(2 km,2 km)、(2.5 km,1 km)、(3.5 km,4.5 km)、(3.6 km,7 km)、(6 km,6 km)、(5.7 km,4.5 km)、(5.4 km,3 km)、(5 km,1 km)、(8 km,6 km)、(8 km,3 km)、(8 km,2.4 km)。目标1的初始速度为50 m/s,初始位置为(0 km,0 km);目标2的初始速度为40 m/s,初始位置为(0 km,1 km)。平行于道路方向和垂直于道路方向的噪声标准差分别为15 m和0.5 m。传感器的最大跟踪能力均为2,在不考虑多普勒盲区时的探测概率均为98%,MDV均为10 m/s,截获损失的重要度评价函数中工作性能、战术价值和成本的权重分别为0.4、0.4、0.2。传感器的其他参数见表1。
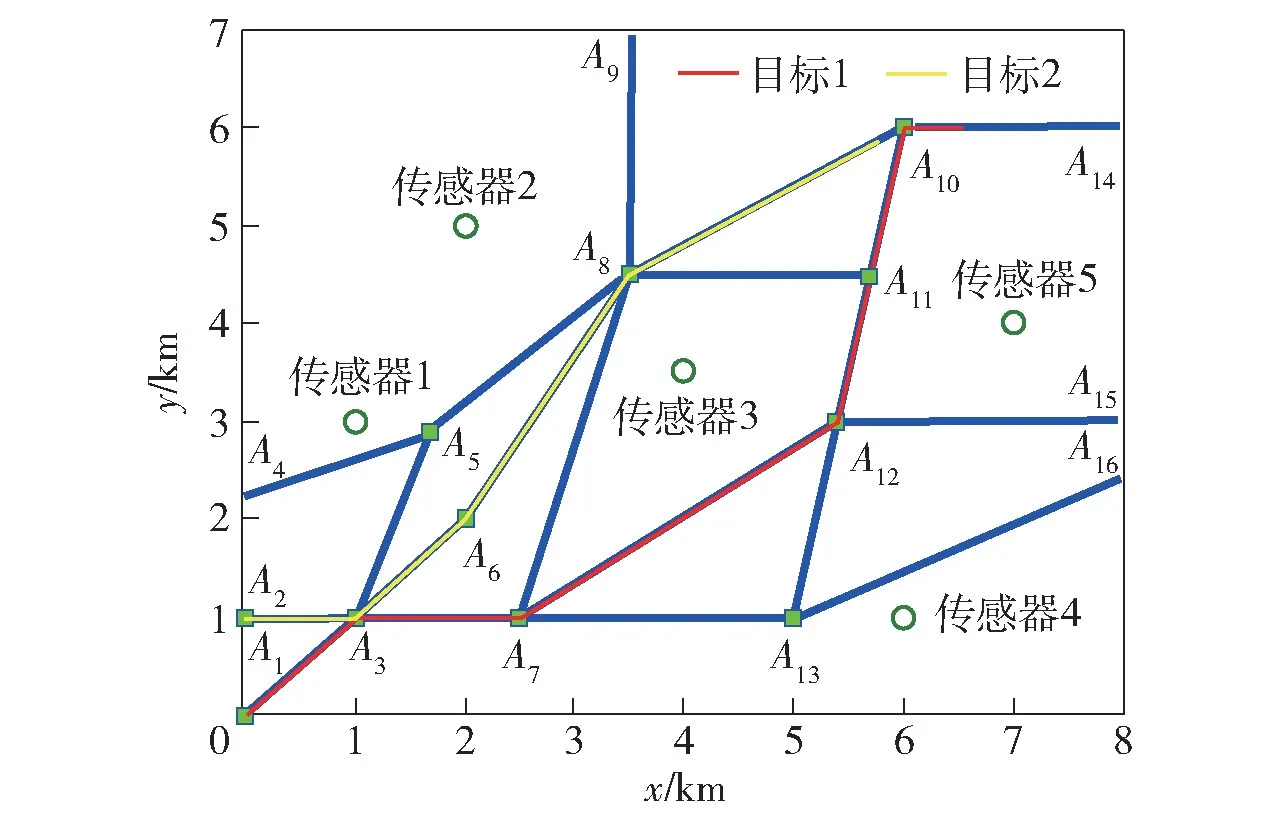
图5 道路网及目标运动轨迹Fig.5 Road network and target trajectory
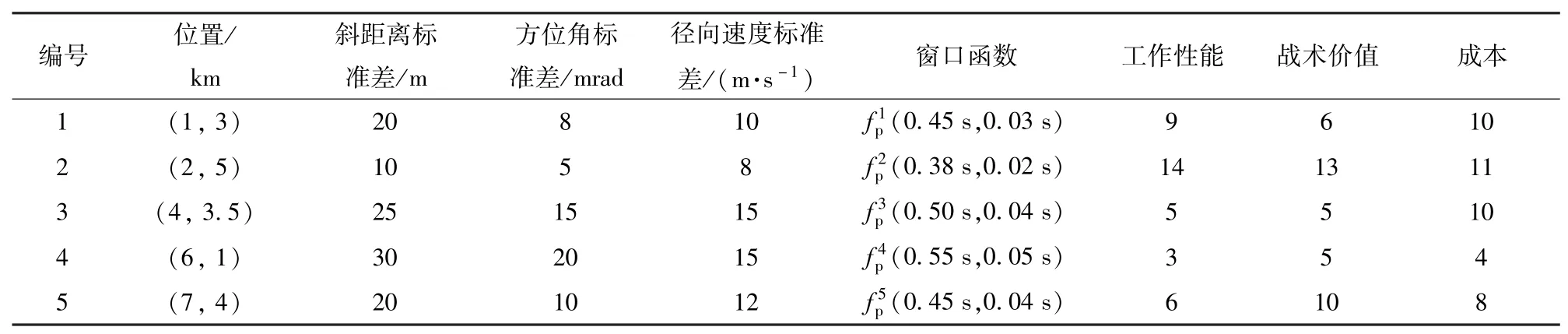
表1 传感器参数Tab.1 Sensor parameters
敌方目标所带侦察对抗设备的窗口函数为(0.5 s,0.03 s)和(0.4 s,0.04 s),传感器信号被截获的最小需要时间=0.2 s。仿真总时间为200 s,采样间隔为2 s,决策步长=3,蒙特卡洛仿真次数为100次。
LF-SSA参数如下:樽海鞘种群规模为30个,前15个为领导者,后15个为追随者,最大迭代次数为100次。
本文所有仿真均在Intel Core i7-10850H、2.70 GHz至5.10 GHz、6核处理器、16 GB内存的计算机上进行。
5.2 平衡系数α的选取
平衡系数的作用是平衡跟踪精度和截获损失之间的关系,其与两种指标的数量级有关系,与决策步长无关,因此本文在=1的情况下对平衡系数的影响进行研究,从而选取合适的值。图6给出了=1时平衡系数的变化对两种指标归一化后数值的影响。由图6可以看出,平衡系数越大,跟踪精度越小,截获损失越大,这是由于随着增大,跟踪精度对于总目标函数值的影响会越来愈大,传感器管理的结果也会越来越注重跟踪效果,而逐渐忽视控制截获损失。反之,当逐渐减小时,决策的结果会更加注重控制截获损失,当过大或过小时,均会造成两种指标的失衡,无法达到兼顾的效果。当=0.15时,两种指标十分接近,说明此时二者达到了相对的平衡,因此取=0.15。
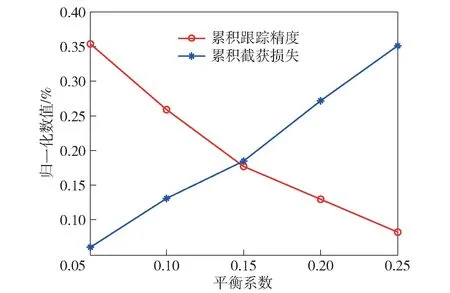
图6 平衡系数对两种指标值的影响Fig.6 Influence of equilibrium coefficient on two index values
5.3 LF-SSA算法性能分析
为了分析本文提出的LF-SSA性能,采用传统SSA、粒子群优化(PSO)算法和穷举搜索(ES)法进行对比。SSA的参数同LF-SSA,PSO算法的具体步骤可参考文献[30],相关参数取值为:粒子种群规模数30,最大迭代次数为100,最大惯性权重为0.9,最小惯性权重为0.4,加速因子为1.7,最大速度为3。
各算法性能对比结果如表2所示,平均单次运行时间用于评价算法的搜索速度,与最优解之间的平均值由于评价算法的收敛精度,ES算法所得的解必为全局最优解,可用来作为最优参照。其中,ES算法虽然能获得效果最好的管理方案,在寻优时需遍历全部解空间,运行时间过长,且超过了传感器的采样间隔,实用性较差。LF-SSA的运行速度较慢于SSA和PSO算法,因为其通过莱维飞行策略生成随机数需要额外的计算代价,但是增加的时间并不多,不影响算法整体的时间复杂度。相比之下,LF-SSA所获得的解与最优解相差更小,即更接近全局最优解,收敛精度更高,说明其兼顾了搜索速度和收敛性,寻优的效果更好,算法的综合性能更优。
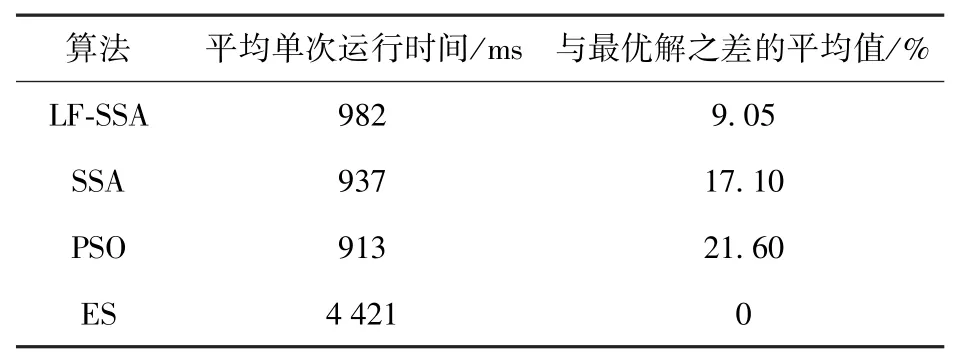
表2 各算法性能统计Tab.2 Performance statistics of each algorithm
为进一步分析LF-SSA的性能,图7(a)~图7(d)分别给出了在第1 s、40 s、80 s、120 s、160 s和200 s的目标函数值随算法迭代次数的变化曲线。由图7可以看出,LF-SSA会在某几次迭代中,目标函数值快速下降,这是由于LF策略采取短距离搜索和偶尔长距离搜索相结合,能够使算法克服区域极小值的吸引,摆脱局部收敛,从而找到更优的解,而SSA和PSO算法容易发生局部收敛现象,在某一极值处产生停滞,致使寻优效果不理想。同时,相比PSO法和SSA,LF-SSA所得的解更接近于全局最优解(即ES算法所得的解),收敛精度更好。

图7 目标函数值随各算法迭代次数的变化情况Fig.7 Change of the objective function value with the iteration times of each algorithm
5.4 传感器管理方法分析
为了对本文所提传感器管理方法的性能进行充分分析,采用以下2种方法进行对比:
1)短期管理方法:在跟踪过程中,采用一步收益最佳为优化目标。
2)最近邻方法:在跟踪过程中,采用距离目标最近的传感器(从非盲区传感器中选择)进行跟踪,此方法理论上可获得较优的跟踪精度。
引入均方根误差(RMSE)来评价目标跟踪的效果,各方法所对应的目标位置RMSE变化情况如图8所示;各方法所对应的传感器截获损失变化情况如图9所示。由图9可以看出,在3种方法中,最近邻方法由于选择了距离目标最近的传感器进行跟踪,在每时刻能获得较优的跟踪效果,其整体的跟踪性能也优于其他两种方法,但由于其不能通过解算目标函数来控制传感器的合理切换,会使传感器的被截获概率随着连续工作时间的上升而持续增长,从而造成较大的截获损失,不利于传感器的战场生存,说明了设定加权平衡的目标函数求取传感器管理方案的重要性。而本文方法和短期管理方法通过在每时刻解算目标函数,能够做到目标跟踪和控制辐射的合理平衡,二者虽然跟踪效果略差于最近邻方法,但大大减少了截获损失,更具实用性。同时,相比于短期管理方法,本文方法采取了多决策步长的长期管理,能够在每时刻获得更小的目标函数值,整体管理效果更优,验证了长期管理的优越性。同时,本文方法所得的跟踪精度并非在每一时刻都优于短期管理方法。这是因为在决策制定的预测阶段,由于长期管理在目标状态估计时需通过预测量测值递推多步,而不获取实际量测,可能会造成状态估计误差的加大,从而无法获得最优的传感器管理方案,但从整个跟踪过程上来看,其性能依旧优于短期管理。

图8 不同方法下每时刻目标位置RMSE的变化情况Fig.8 Target position RMSE at each time under different methods
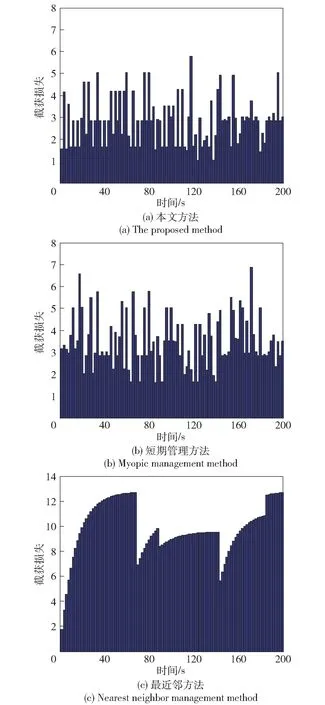
图9 不同方法下每时刻传感器截获损失的变化情况Fig.9 Sensor interception loss at each time under different methods
图10给出了跟踪精度、截获损失和目标函数值在整个仿真时间总数值归一化后的结果。由图10可以进一步看出,本文方法在控制截获损失和整体性能平衡上均表现最佳,且跟踪效果相比于最近邻方法差距很小,验证了本文方法的有效性和先进性。
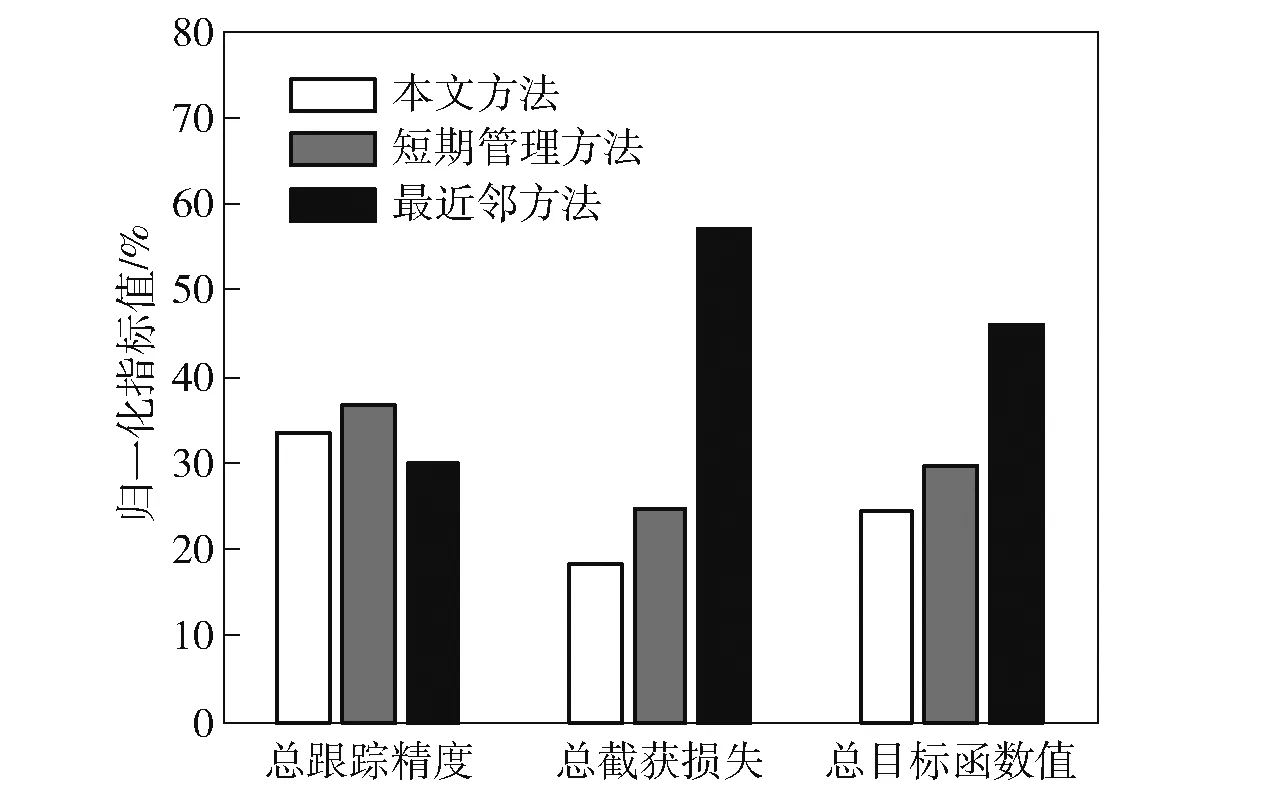
图10 不同方法下各指标归一化数值Fig.10 Normalized values of each index
为验证本文所提多普勒盲区下目标预测状态修正方法的有效性,以目标1为例,给出了其相对各传感器的径向速度和有无盲区信息修正下的位置RMSE示意图,如图11、图12所示。由图11、图12可以看出,在跟踪过程中所有的传感器均存在多普勒盲区,而盲区信息修正方法的跟踪性能要优于无修正方法。特别是在128 s左右,目标1位于所有传感器的多普勒盲区,此时无修正的估计方法误差很大,而盲区信息修正方法的RMSE仍会出现一定波动,但是相对于无修正方法,误差得到了有效控制。该法从一定程度上减小了航迹关联的错误率,提高了目标状态估计的质量。
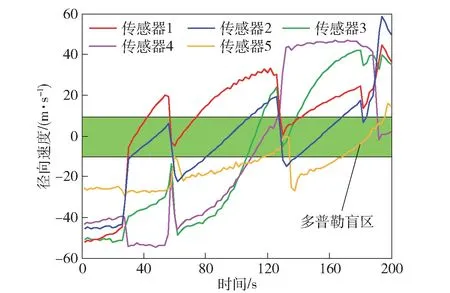
图11 目标1相对各传感器的径向速度变化Fig.11 Radial velocity variation of Target 1 relative to each sensor
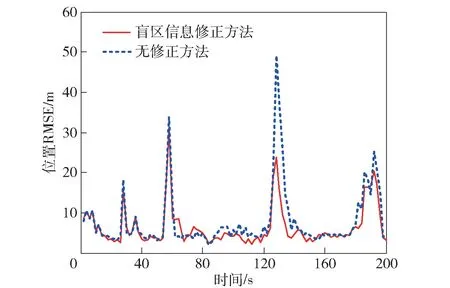
图12 有无盲区信息修正下每时刻目标1的位置RMSEFig.12 Position RMSE of Target 1 at each time with/without blind zone information correction
图13给出了传感器-目标的分配方案,即每时刻目标函数的解,其直接着影响传感器管理的效果。由图13可以看出,在整个跟踪过程中,不易被截获、重要度小的传感器3和传感器4被频繁使用,而最容易被截获、重要度最高的传感器2使用次数最少,符合控制辐射从而减少截获损失的实际要求。进一步说明了通过本文传感器管理方法所制定的决策方案,可在每时刻合理切换各传感器工作,实现了传感器系统在目标跟踪和控制截获损失上的合理平衡,即保障了跟踪性能,又提高了传感器系统的战场生存能力。
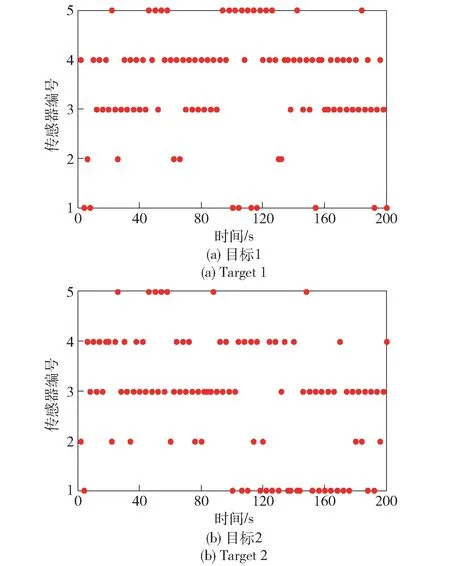
图13 传感器-目标的分配方案Fig.13 Sensor-target assignment scheme
6 结论
本文针对道路约束下的地面目标跟踪任务,基于POMDP框架对传感器管理方法进行了研究,建立了道路约束下的地面目标跟踪模型和传感器截获损失模型,给出了多普勒盲区下目标预测状态修正方法、目标跟踪精度计算方法和截获损失计算方法,提出了基于LF-SSA的优化算法以求取管理方案。得出主要结论如下:
1)本文所提出的LF-SSA可提高寻优时的全局搜索能力,从而摆脱局部收敛,在较短时间内找到高质量的解。
2)本文所提传感器管理方法有效地解决了多传感器系统对道路约束下地面目标跟踪的需求,可确保系统合理决策,更好地实现目标跟踪和控制辐射损失的合理平衡。
3)在目标进入传感器的多普勒盲区后,本文所提利用盲区信息对目标预测状态进行修正的方法可在一定程度上提高目标状态估计的准确性。
在下一步研究中,会在传感器管理模型中考虑更加复杂的非线性地面目标和起伏地形约束等与实际战场情况更贴合的因素。