车载光纤传感系统对电客车弓网关系的实时监测
2022-05-20吴迅奇
吴迅奇
(上海拜安传感技术有限公司 上海 201210)
1 现有弓网监测技术的不足与分析
目前,弓网监测的主要技术有机器视觉成像技术[1-3]和电子类传感器技术。两者关于可监测项点和安装工艺项点的对比如表1所示。
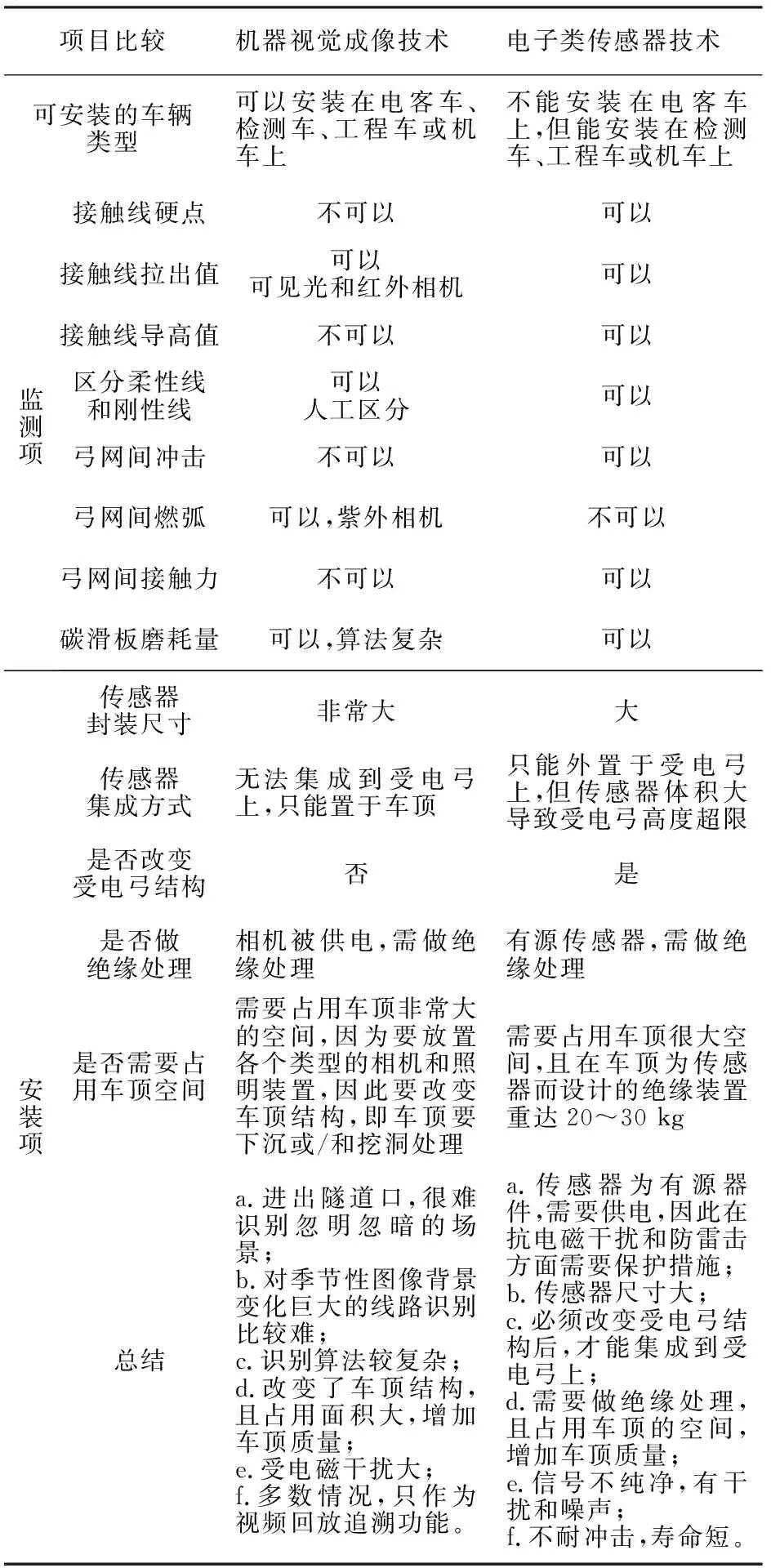
表1 机器视觉成像技术与电子类传感器技术之间测量效果对照表
因此,为避免影响电客车运行时弓网间的正常工作关系,亟需一种无源探测式的、体积更小、质量更轻的监测元件安装在受电弓弓头上,对弓网关系进行实时监测。
2 MEMS光纤弓网监测系统构成
基于MEMS光纤传感技术和高速光纤解调技术组建的弓网关系实时监测系统,主要由4支MEMS光纤接触力传感器、2支MEMS光纤3轴加速度传感器和1台高速光纤传感分析仪组成。所选用受电弓为一款地铁用双碳滑板弹簧箱式受电弓,MEMS光纤传感器在受电弓弓头的安装位置如图1所示[4],其中4支具有温度补偿功能的MEMS光纤接触力传感器以垫片的形式集成嵌入在弹簧箱内,使该垫片式接触力传感器的一面位于弹簧箱底部,另一面与弹簧箱内起阻尼或/和缓冲作用的弹簧相接触;2支MEMS光纤3轴加速度传感器借助受电弓弓头上碳滑板底座的预制安装孔,各自位于弓头两条碳滑板的一侧,并相互在弓头上斜对称布置安装,且该加速度传感器的3个轴分别平行于地铁线路上所定义的垂向、横向和纵向方向。

图1 MEMS光纤传感器在受电弓上的安装位置
MEMS光纤传感弓网监测系统的光路布线图如图2所示。由于6支MEMS光纤传感器的总质量非常轻,所以不会对受电弓弓头在升弓工作状态下产生影响。所选用的MEMS压力芯片的量程为200 N,MEMS加速度芯片的量程为±200g;具有16组光学通道的高速光纤传感分析仪以2U标准机箱的形式置于地铁车厢的电气柜内,该分析仪内的扫描激光器的频率为2 500 Hz,可以对高速传感分析仪的16组光学通道进行同步扫描探测并采样数据。另外,在不改变车顶和车内结构的情况下,该系统可完全胜任对行驶电客车的弓网进行的实时监测。
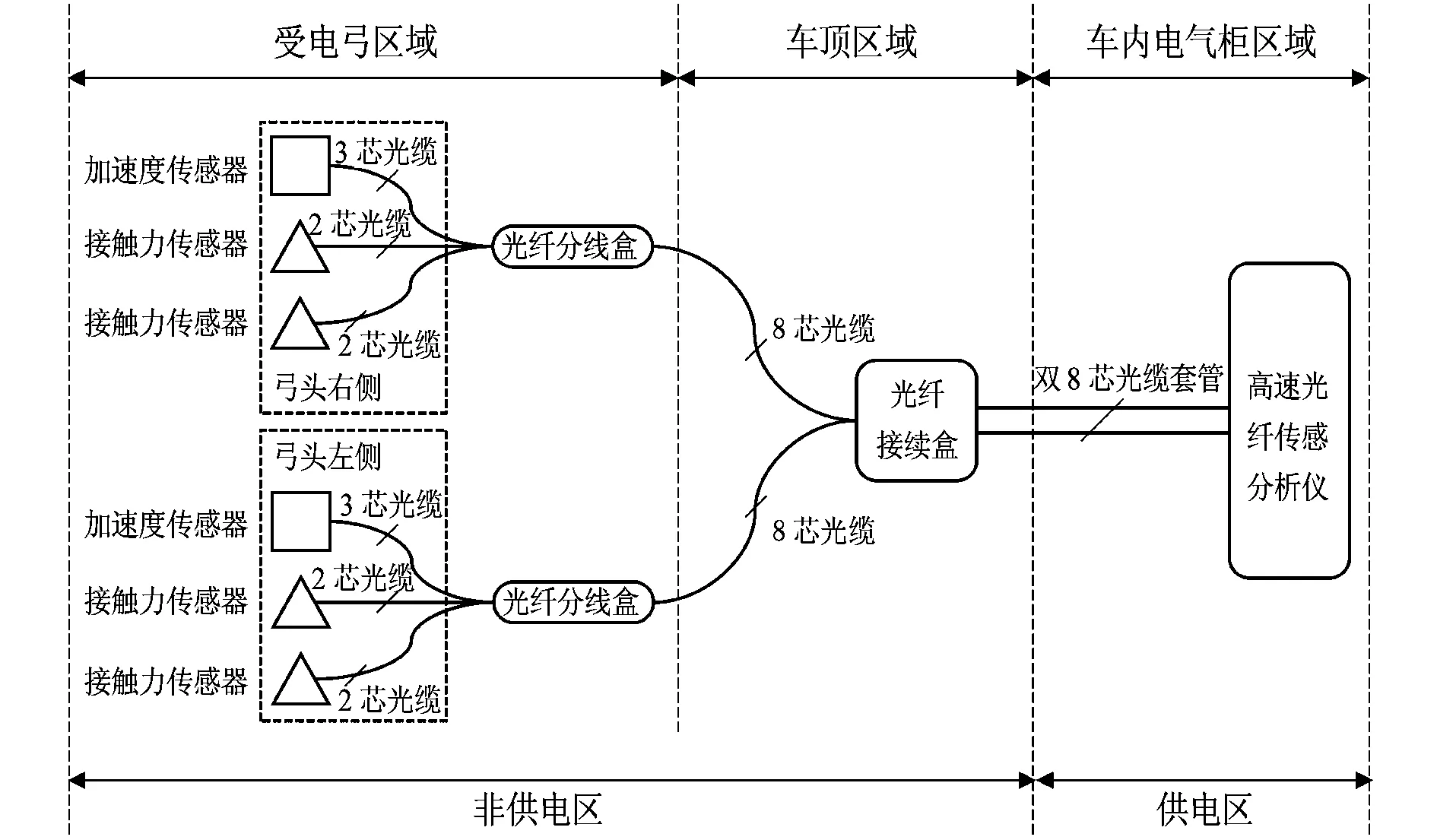
图2 MEMS光纤传感弓网监测系统光路布线图
3 监测结果及分析
系统用波长探测并采集了国内某条地铁线上的弓网关系数据,通过图3可知,该电客车在90 min内共行驶了36个区间路段。
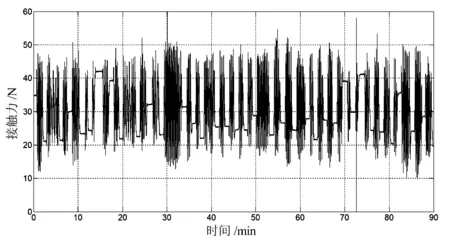
图3 单支接触力传感器采集到的弓网间接触力值
3.1 对弓网接触力的监测
电客车在行驶时,为了让受电弓能够从接触线上正常受流,弓网间必须保持一定的接触力,接触力的大小视不同结构的受电弓而定,一般弓网间接触力为定值,例如80 N或120 N。每组碳滑板、碳滑板底座和羊角由两支弓头支座支撑,接触力传感器集成在弓头支座的阻尼/缓冲系统上。
图3为90 min内单支MEMS光纤接触力传感器所采集到的弓网间接触力值,图4为第34号区间路段上,单支MEMS光纤接触力传感器所采集到的弓网间接触力值。如图4所示,停车时,单支碳滑板上每支接触力传感器的测量值是不变化的,时域曲线是平坦的;行车时,单支碳滑板上每支接触力传感器的测量值是变化的,时域曲线是锯齿形的,因此,就同一根碳滑板两端的接触力传感器而言,其各自的测量值呈“Z”字形变化,与接触网在线路上的拉出值保持一致。

图4 第34号路段上单支接触力传感器采集到的弓网间接触力值

图5 受电弓弓头与接触线之间的接触力值
单支碳滑板所承受的接触力是其两端接触力传感器测量值之和,而受电弓弓头与接触线之间的接触力是所有碳滑板所承受的接触力之和(见图5)。在整个电客车行驶路段上,受电弓和接触线之间的动态接触力以120 N和130 N为中心线上下波动,波动幅值在±20 N和±30 N左右,受电弓和接触线之间的接触力在大部分路段表现异常,存在过高机械磨耗,因此弓网工作状态不理想。在72.6 min时,无论是单支接触力传感器还是作为整体的受电弓弓头所感受到的动态接触力值都非常异常,接触力瞬间从10 N达到了200 N,波动幅度约为190 N左右(见图6),因此,此处接触力异常疑似由于接触线上的硬点对运动中的受电弓碳滑板造成的冲击所导致。
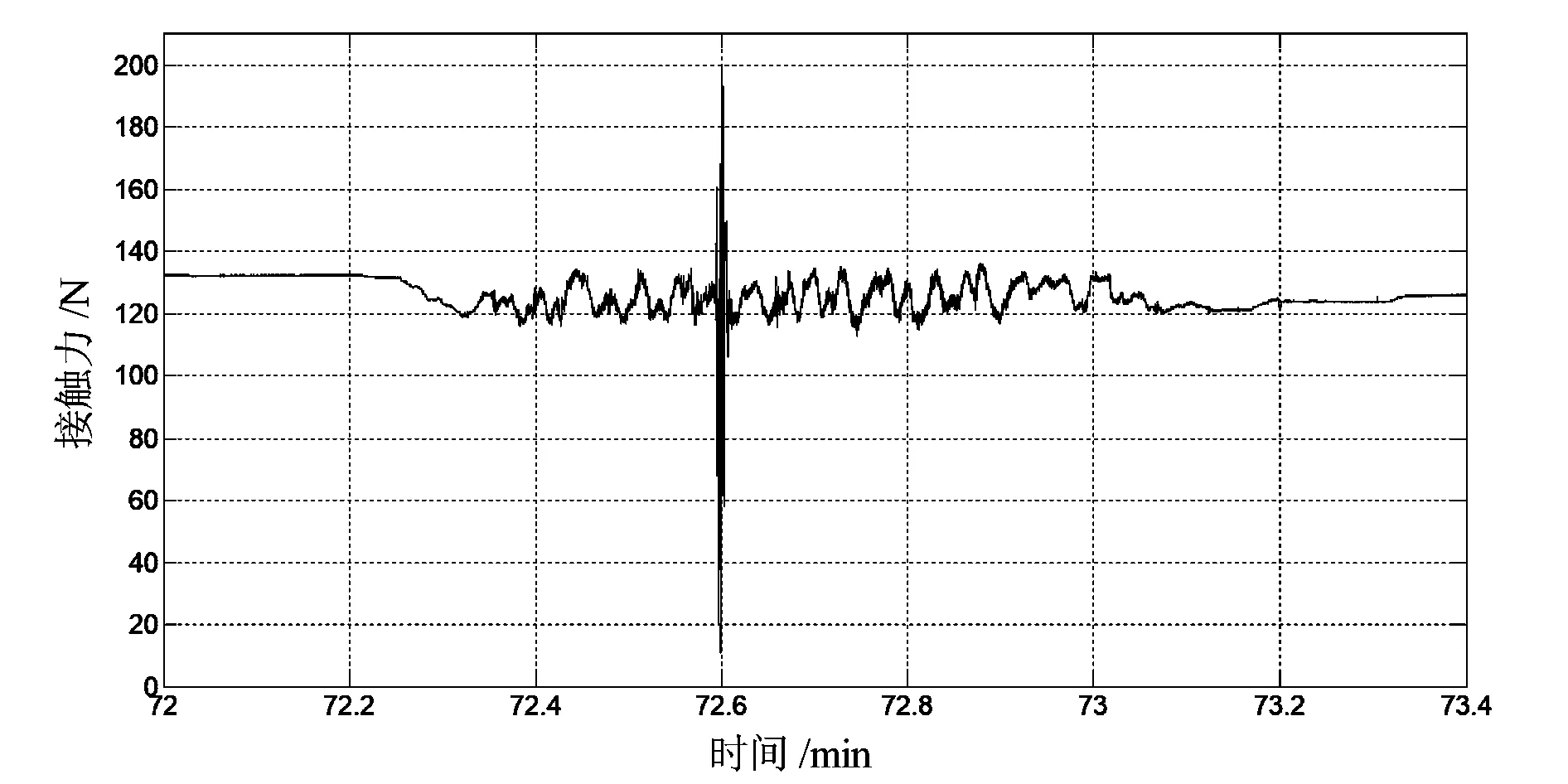
图6 第29号路段上受电弓弓头与接触线之间的接触力值
3.2 对接触线硬点的监测
系统可通过集成在受电弓弓头上的加速度传感器中的垂向加速度值,对接触线上的硬点进行实时监测。一般情况下,电客车在运行时,受电弓的弓头会在垂向方向上做上下振动,依据行车速度及接触线的高度、类型不同,在一定的区间内振动,例如±10g。如果受电弓弓头撞上接触线上的硬点,会瞬间产生±100~200g的冲击(见图7、图8)。

图7 加速度传感器垂向方向上的加速度值

图8 第29号路段上加速度传感器垂向方向上的加速度值
图7展示了90 min内,MEMS光纤加速度传感器所采集到垂向方向上的加速度值,可以看出,其中的第1、4、12、22、25、26、34和35号路段上,受电弓弓头的振动幅度在±75g左右,接触线对弓头的冲击较大,疑似为接触线不平顺的集中路段,结合弓网接触力传感器反馈的数据可知该8处路段状态比较糟糕。其余路段上的振动幅度在±10g左右,基本属于正常,因此接触线状态比较好。图8展示了第29号路段上,MEMS光纤加速度传感器所采集到垂向上的加速度值,可看出同样在第72.6 min时,受电弓弓头垂向方向上的加速度值瞬间从-200g达到了120g, 此处的弓头振动冲击值非常大, 疑似为由接触线上的硬点所致。
4 结束语
随着国家对信息技术的不断投入,带动了轨道交通行业朝着智能化的方向稳步前进,与铁路技术密切相关的智能技术及一系列新技术手段发展迅猛,智能铁路总体构架逐步形成。将来,受电弓会向着“智能受电弓”的方向快速发展,不再仅仅具有受流功能,还可以“感知”和“认知”接触线和受电弓自身的工作状态,并结合列车信息管理系统的里程信息,定位受电弓或/和接触线发生故障的位置,为接触线和受电弓的维护带来便利。