一种无源髋关节助力外骨骼设计与人机工程研究
2022-05-20王艺澜涂细凯徐一鸣秦榕
王艺澜,涂细凯*,,,徐一鸣,秦榕
(1. 湖北工业大学 工业设计学院,武汉 430068; 2. 湖北工业大学 机械工程学院,武汉 430068)
随着我国现代机械与工业技术的迅速进步和发展,大多数行业的生产过程已基本实现机械化和自动化[1]。但是,人员徒手搬举在多数服务领域和制造业中依旧很普遍。 与徒手搬举有关的肌肉骨骼疾病,尤其是下背痛(LBP)的发病率逐渐增加,引起了大部分企业和国内职业健康领域的关注[1-3]。
为了避免职业性的下背痛疾病,国内外的相关研究机构对腰部保护装置进行了专项研究,并开发了各种可穿戴的腰部保护装置。这些设备主要对髋关节或脊柱关节进行助力,以此来保护腰部主要肌肉。根据采用的驱动器的区别,分为两种类型:直流电机驱动的主动型助力和弹性材料省力的被动型助力[4]。Miura等[5]设计了一种通过电源驱动髋关节而减少力矩的HAL可穿戴机器人。Toxiri等[6]设计的H-WEX是一种电动式移动腰部外骨骼。在设计原则上,穿戴式外骨骼助力装置应尽可能轻巧,易于佩戴和使用,节约能源并易于控制。与被动外骨骼相比,主动助力外骨骼在重量上没有优势,且结构相对复杂,穿戴过于繁琐,被动型外骨骼轻便、节约能源与成本,所以本文研究被动型助力外骨骼。
Imamura[7]开发的Smart Suit Lite是一种被动助力装置,它利用弹性带的弹力来消除身体上的负荷并减轻疲劳。Zhang等[8]提出了一种采用外部辅助推拉方法的被动脊柱外骨骼,大幅度减少腰部区域的力和扭矩。Näf等[9]提出通过在躯干、骨盆和大腿上施加力来减少背部受力的被动外骨骼。Koopman[10]设计的被动外骨骼Laevo,利用杠杆的工作原理将人的腰部力量传递回大腿, 每次弯曲都可以使腰部力量减小30%到40%。,国内的外骨骼机器人研究起步比国外晚,技术不如国外成熟,处在理论研究阶段。李向攀等[4]研究柔性气压驱动为腰部运动提供所需的助力,减轻下腰痛。陈寿齐等[11]设计了一款单兵腰部助力装置,用来减少火炮装填手的腰部伤害。高坤等[12]设计了肘关节自锁机构的可穿戴外骨骼助力搬运机器人,为人体腰部提供助力。
对于与用户紧密接触的可穿戴式外骨骼助力型机器人来说,设备的轻便性、可靠性和舒适性会直接影响用户对设备性能的评价。装置的轻便性、可靠性和舒适性是评估优质可穿戴设备的重要指标[13]。
国内外的研究文献表明,大多数学者研究的外骨骼只强调装置省力而忽视装置舒适度。大多数无源髋关节助力外骨骼髋关节活动范围只有屈曲/伸展这两个自由度,针对上述问题,本文设计一种无源的、髋关节四自由度的、髋关节省力的外骨骼装置,既可以帮助搬运人员在搬运活动中减少髋关节受力,保护腰部主要肌肉;又可以增加装置使用时髋关节的外展/内收活动范围,从一维空间扩展到二维空间,提高装置使用时的舒适度。
1 腰部生物力学分析
人向前弯腰搬重物,分析腰部受力情况。根据生物力学原理[14],建立人在搬运重物时的力学模型如图1所示。其中,G1代表的是搬运的重物的重力,G2代表人上半身的重力,Fe、Fa分别代表人胸部、背部的肌肉产生的肌力,F1为人体下半身对腰椎的支持力,F2代表脊柱产生的拉力,F3代表腹腔内产生的压力,F4代表髋关节所受压力。

图1 搬运重物时腰部力学模型
通过力学知识可知,人体在搬运重物时,O点所受的力矩之和为零,即
G1L1+G2L2+F4L5-F3L3-F2L4=0
(1)
在不穿戴助力外骨骼装置时,人弯腰搬运重物时髋关节所受压力F4的计算公式为
F4=(F3L3+F2L4-G1L1-G2L2)/L5
(2)
根据生物力学模型可知,在弯腰搬运重物时,要减少人弯腰搬运时腰部肌肉的损伤,就是要减少髋关节所受压力F4,这也是本文的研究重点。搬运重物时人体腰部的生物力学原理,指导接下来外骨骼方案的设计,为方案设计提供理论支撑。
2 外骨骼方案设计
通过对搬运重物时人体腰部进行受力分析,对腰部肌肉受力有了进一步了解,得知减少髋关节所受力矩就能减少腰部肌肉受力,从而保护腰部肌肉。与主动外骨骼相比,被动外骨骼的优点在于它利用机械结构省力,穿在用户的身上提供保护和身体支撑等功能。省去了电机等的质量,装置整体质量轻于有源外骨骼,所以本文设计的外骨骼装置采用无源的机械结构。
2.1 省力结构设计
当人下蹲弯腰搬运重物时,人的上半身向前倾斜并且处于半蹲的姿态。在搬起重物的过程中,上半身会对髋关节产生较大的压力,长此以往便会对髋关节附近以及腰背部肌肉造成损害。结合所学的物理力学知识,人向前弯曲的过程中,在胸部施加一个支撑上半身的力,这样就能减少髋关节所受的压力,达到省力的效果。
图2为外骨骼省力原理示意图,以髋关节处为支点,在胸部与髋关节、腿部与髋关节各连接一根弹性材料的连接杆,并在髋关节处用弹簧将上下两根弹性杆连接。在搬运重物时,人体先由直立状态向前弯曲上半身,在这个过程中弹性杆和弹簧会受到变形从而产生弹性势能。当人体搬运重物上升的过程中,弹性杆和弹簧会释放弯腰时储存的弹性势能,帮助人体搬起重物,从而达到省力的目的。

图2 外骨骼省力原理图
为了适应使用人群的多样性,在设计方案时涉及到的弹性杆的宽度与长度都是可以根据自身身材调节的,这样就可以避免穿戴不适合导致的功能缺失及不适感。
2.2 髋关节方案设计
髋关节[15]是人下肢重要的关节系统,结构比较复杂。一方面,髋关节是全身受力最大的关节,连接躯干和下肢;另一方面,髋关节是人体最稳定、活动性最大的关节。髋关节可围绕矢状面、冠状面和水平面的3个基本轴运动,基本的运动方向为:屈曲/伸展、外展/内收、内旋/外旋,表1中列举了人体髋关节的运动范围[16]。

表1 人体髋关节的运动范围
现有的无源被动髋关节助力外骨骼的研究中,存在一个普遍的问题,即外骨骼装置只保留髋关节屈曲/伸展这一个自由度,而其他两个自由度在外骨骼设计中因为机身重量和其他原因被限制了。通过对搬运工作者的走访调研和自身的生活经验,弯腰搬运重物的过程中髋关节活动范围对舒适度有很大的影响。人弯腰搬运重物时,髋关节外展/内收和屈曲/伸展的四自由度比只有屈曲/伸展的二自由度的舒适程度高。
人机工程学中最重要的指标是人与机之间的关系,对于穿戴产品来说,穿戴舒适性是评价外骨骼方案的重要指标。在本文的外骨骼方案设计中,髋关节的设计为有屈曲/伸展、外展/内收的四自由度,增加了髋关节的活动范围,将人的活动范围从一维度扩展到二维空间。考虑到利用传统的机械结构增加一个自由度会使装置的总体重量增加,装置的重量在装置舒适度中也有一定影响。所以在髋关节方案设计时,采用传统的机械结构-铰链来屈曲/伸展这一自由度,在铰链处放置扭转弹簧来达到装置的省力效果。如图3所示,对两个髋关节之间的连接,采用可以发生弹性形变的弹性带,使髋关节活动范围为屈曲/伸展和外展/内收。髋关节向外展时弹性带发生形变,产生并储存弹性势能,内收时弹性带释放弹性势能,能够为髋关节省力。

图3 髋关节设计方案模型
根据提出的设计方案,如图4所示,建立髋关节设计方案的使用情况模拟图,髋关节能够达到屈曲/伸展、外展/内收的四自由度的活动范围。
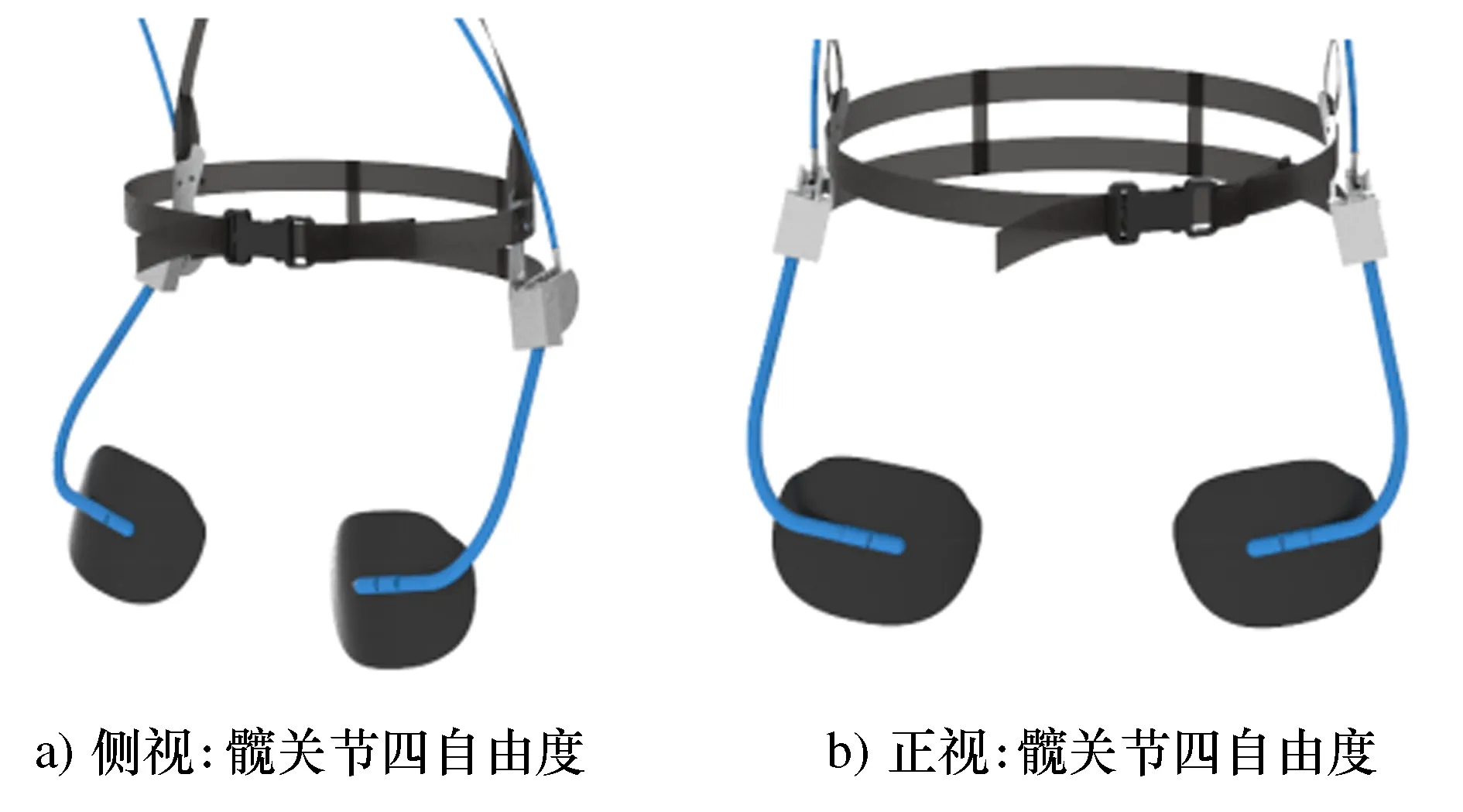
图4 模拟髋关节设计方案使用情况图
2.3 整体方案设计
在无源腰部助力外骨骼方案中,如图5所示,外形设计为类似衣服的样式,采用“开衫”形式的穿戴方式,在方便穿脱的基础上,增进外骨骼对人的亲切感,让使用者在心理上更能接受穿戴本助力外骨骼工作。

图5 外骨骼整体方案模型
后背的背带与腰部的固定带都能调节尺寸,可以满足不同身材人群的使用。胸部支撑处为省力结构的一部分,需要承受一定的力,胸部支撑的材料选择硬性材料。为了增加穿戴者的舒适感,在与胸部接触的部位、硬性材料后设计一块软垫,这样既能满足功能需求又能保证外骨骼的舒适性,腿部支撑的设计与之相同。胸部与腰部的连接处采用卡扣形式,穿脱操作简单且固定效果良好。上半身与腿部的弹性杆可以调节长短,满足多使用人群的需求,上半身的弹性杆还能够调节左右与胳膊的距离,能够避免穿戴时尺寸不合身而降低装置的舒适度与有效性。
2.4 材料选择与计算
此次提出的无源腰部助力外骨骼方案中,省力系数的关键在于弹簧与弹性杆的选材。该装置主要是帮助物流人员日常弯腰搬运重物时髋关节省力,因此以年龄25~45岁、身高170 cm、体重70 kg的男性数据为设计依据,弯腰最大搬运25 kg重物,以国际标准GB10000-88的中国成年人体尺寸确定的百分位90的数据[17]为参考,完成设计。
2.4.1 弹簧
结合外骨骼方案中省力结构的省力方式,弹簧选取为圆柱螺旋扭转弹簧。在ADAMS仿真软件中得到身高170 cm、体重70 kg的男性在弯腰搬运25 kg重物时髋关节所受最大力矩为113 Nm,可知单个髋关节所受最大力矩为56.5 Nm。根据《机械设计手册》[18]中的计算圆柱螺旋扭转弹簧公式,计算出弹簧的直径d和有效圈数n,即:

(3)

(4)
根据不同材料,计算出不同省力程度与尺寸的弹簧参数,如表2所示。考虑到加工与外骨骼装置尺寸等实际情况,选择直径为4 mm,圈数为20的琴钢丝G2Ⅱ类弹簧,省力程度为10%。

表2 不同材料的圆柱螺旋扭转弹簧的参数
如图6所示的弹性部件省力工作原理图,G为人体上半身的重力,F7为扭簧对人体上半身产生的弹力。当人体弯腰时,上半身旋转α,上半身支撑弹性杆会接触到扭簧,扭簧开始发生弹性形变并且产生数值较小的弹力F7,此时,人体上半身的重力G在弹力F7的方向上存在分力G1,G1>F7,所以人在刚穿戴外骨骼弯腰的过程中,可以依靠自身的重力轻松的将扭簧压缩。本装置中将α定为5°,人的质量为70 kg(700 N),上半身的占身体总重量的60%,为420 N。而髋关节左右两边各有一个扭簧,因此G1为18.27 N。根据人体尺寸确定上半身弹性杆长度为40 cm,G1在O1点产生的力矩M1为7 308 N·mm,此时M1远大于上文中已选扭簧的弹性系数305 N·mm,所以人在弯腰时,只需要依靠自身的重力,不需要用额外的力去克服弹性部件产生的阻力。

图6 弹性部件省力工作原理图
当人在搬运重物时,人体上半身的重力和重物的重力驱使弹性杆产生形变,进行储能。虽然弹性杆在储能的过程中,会对人体产生阻力,但是这些阻力相比于重物和人体上半身的重力而言,数值较小,不需要用额外的力去克服。而且这些阻力对人体产生的负面影响会被胸垫和腿垫所分散,提高使用的舒适度。
2.4.2 弹性杆
考虑到外骨骼助力方案的省力方式,弹性杆的计算以上半身受力情况、尺寸为例,上半身弹性杆与腿部弹性杆长度不同、材料型号相同。
弹性杆的参数[19]为:

(5)
(6)
式中:y为搬运时胸部的位移;F为弹性杆产生的弹力;L为弹性杆的杆长;E为弹性杆材料的弹性模量;I为弹性杆的转动惯量;D为空心圆管的外径;d为空心圆管的内径。
考虑到外骨骼助力装置的轻便程度,为了降低装置的重量,初定弹性杆为空心圆管。结合弹性杆实际工作情况,暂定圆管外径D为10 mm,内径d为7 mm,搬运时胸部的位移y为6 cm。一侧弹性杆的受力F为上半身重力与搬运重物重力之和的一半,即335 N。
根据公式计算出3种不同材料的不同省力程度,确定弹簧为直径为4 mm,圈数为20的琴钢丝G2Ⅱ类弹簧,省力程度为10%。弹性杆为圆管外径D为10 mm,内径d为7 mm的轧制铝,省力程度17.4%;圆管外径D为10 mm,内径d为7 mm的T700碳纤维材料,省力程度53%;圆管外径D为10 mm,内径d为7 mm的65Mn弹簧钢,省力程度51.9%。基于装置的结构可知,装置省力由弹簧与弹性杆共同工作,所以弹簧与弹性杆省力程度之和为装置的省力程度。
现选出3种材料的3种不同省力程度,分别是直径为4 mm,圈数为20的琴钢丝G2Ⅱ类弹簧和圆管外径D为10 mm、内径d为7 mm的轧制铝,省力程度为27.4%;直径为4 mm,圈数为20的琴钢丝G2Ⅱ类弹簧和圆管外径D为10 mm、内径d为7 mm的T700碳纤维材料,省力程度为63%;直径为4 mm,圈数为20的琴钢丝G2Ⅱ类弹簧和圆管外径D为10 mm、内径d为7 mm的65Mn弹簧钢,省力程度为61.9%。
3 外骨骼方案仿真分析
3.1 动力学仿真分析
为了分析人体穿戴外骨骼搬运重物时,外骨骼装置能够为用户省多大的力,利用ADAMS软件对人体穿戴外骨骼前后的搬运状况进行动力学分析[20],分析髋关节旋转的角度得到模拟搬运中髋关节所受的力矩。对比穿戴外骨骼前后的两组髋关节所受最大力矩,计算出外骨骼装置的省力数据。
根据国际标准GB10000-88的中国成年人体尺寸确定的百分位90的数据[17]为参考,在ADAMS软件中导入一个身高170 cm、体重70 kg的男性人体模型,具体的人体尺寸如图7所示,为了简化动力学分析,将人体模型的脚与大地固定,在踝关节、膝关节、肩关节与髋关节连接处分别添加转动副,不考虑踝关节的受力及运动情况。其中,膝关节的扭矩由小腿产生,髋关节的扭矩由施加于躯干的大腿产生,肩关节的扭矩由大臂施加在躯干上产生。在仿真弯腰动作过程与实际弯腰动作过程中,各关节处力矩发生变化[20]。

图7 人体模型尺寸图
在ADAMS动力学仿真分析中,人体上半身的重力为体重的60%,因此在上半身重心处施加上半身重力420 N,在手腕处添加垂直向下的重物的重力250 N,当人体模型弯腰姿势达到极限时,开始搬运重物,采用STEP函数来实现力矩的变化规律[20]。
此次仿真主要是为了对比人体穿戴外骨骼前后搬运重物时,髋关节所受力矩的大小,因此仿真中对未穿戴外骨骼、穿戴外骨骼的人体模型分别进行弯腰搬运重物的仿真分析对比,如图8所示。

图8 穿戴外骨骼前后动力学仿真对比
仿真模拟的动作为人向前弯腰搬重物的过程,在ADAMS中将垂直于人体侧面的轴设为X轴,运动过程中只有X轴有力矩变化,Y、Z轴没有力矩变化,所以仿真得到的曲线图中只得到X轴的曲线变化。在不穿戴外骨骼的情况下,通过对人体弯腰搬运重物的过程进行仿真,得到如图9所示的髋关节所受的力矩变化曲线图,由此可知,未穿戴外骨骼时,髋关节所受的最大力矩为113 Nm。

图9 未穿戴外骨骼髋关节所受力矩变化
再将外骨骼模型导入ADAMS并穿戴在人体上,按照文中对弹性杆与弹簧计算的结果,设置外骨骼模型的参数,3种不同材料分别为琴钢丝G2Ⅱ类弹簧和轧制铝、琴钢丝G2Ⅱ类弹簧和T700碳纤维材料、琴钢丝G2Ⅱ类弹簧和65Mn弹簧钢,并将外骨骼模型各关节处设置运动副,模拟出搬运过程中外骨骼的工作状态。通过仿真分析得到如图10所示的穿戴3种不同材料外骨骼时髋关节所受的力矩变化曲线图,在人穿戴3种不同材料外骨骼时,髋关节所受的最大力矩分别为82 Nm、41.8 Nm、43 Nm。通过计算得知,穿戴3种不同材料的外骨骼后髋关节所受力矩较不穿外骨骼时分别减少了27.4%、63%、61.9%。

图10 穿戴3种不同材料外骨骼后髋关节所受力矩变化
3.2 弹性杆静力学仿真真分析
为了检验弹性杆的强度,对所选的3种材料的弹性杆进行静力学分析。在SolidWorks软件中建立弹性杆模型,将其导入ANSYS软件中,设置弹性杆材料为轧制铝,对弹性杆模型进行静力学仿真分析,得到图11所示的所受应力分布图,结果为轧制铝的弹性杆所受的最大应力为2 079.2 MPa。

图11 轧制铝弹性杆所受应力分布图
再将弹性杆材料分别设为T700碳纤维材料和65Mn弹簧钢,表3列出各种弹性杆材料工作时的最大应力。弹性杆的最大应力小于许用应力,弹性杆才满足强度要求,不会在工作时折断。对比表3的3种材料的最大应力和许用应力,得出只有T700碳纤维材料的弹性杆符合强度要求。

表3 3种材料的弹性杆参数
通过计算材料省力程度与动力学仿真分析,证实3种不同材料:琴钢丝G2Ⅱ类弹簧和轧制铝、琴钢丝G2Ⅱ类弹簧和T700碳纤维材料、琴钢丝G2Ⅱ类弹簧和65Mn弹簧钢搬运25 kg重物的省力程度分别为27.4%、63%、61.9%。结合弹性杆的静力学分析结果,只有T700碳纤维材料的弹性杆符合强度要求,所以选择琴钢丝G2Ⅱ类弹簧和T700碳纤维材料为外骨骼省力材料,外骨骼助力装置所选材料最优结果为搬运25 kg重物省力63%。
3.3 外骨骼装置省力分析
通过计算,最终选择琴钢丝G2Ⅱ类弹簧和T700碳纤维材料为外骨骼装置的省力材料,外骨骼助力装置所选材料最大省力结果为搬运25 kg重物省力63%。而搬运人员的重物不是恒定的,所以需要考虑所选材料对不同质量重物的省力程度,进而得出外骨骼装置的省力范围。
根据搬运人员的任务与工作习惯,确定搬运任务的最小质量为5 kg,研究在搬运5~25 kg重物时装置的省力情况。为了更准确的得到范围重量内的省力程度,也需计算中间质量15 kg重物时的省力数据。
根据上文已经确定的外骨骼装置中弹性杆的材料与尺寸,现在将SolidWorks软件中建立好的弹性杆模型导入ANSYS软件中,设置弹性杆的材料为T700碳纤维。将弹性杆的一端设置固定约束,另一端分别施加搬运的重物重力与上半身重力之和,即235 N和285 N,垂直于弹性杆方向的压力,来模拟人在搬运5 kg和15 kg的重物时,单根弹性杆工作弹性变形产生的位移,如图12所示。
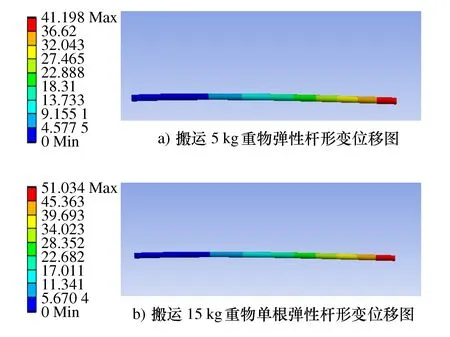
图12 弹性杆工作时形变位移图
由图12可得出人在搬运5 kg和15 kg的重物时,单根弹性杆产生的最大位移分别为41.198 mm和51.034 mm。由公式(5)和公式(6)可以计算出弹性杆所产生的弹力分别约为121.08 N和150.61 N。用弹性杆所产生的弹力除以弹性杆在工作时受到的压力即可得出弹性杆的省力程度,最后得出人在搬运5 kg的重物时,弹性杆的省力程度为51.5%;在搬运15 kg的重物时,弹性杆的省力程度为52.8%。
为了进一步探究搬运人员在搬运5 kg和15 kg重物时,穿戴外骨骼后的省力程度,对人体穿戴外骨骼前后的搬运状况进行动力学分析。对比穿戴外骨骼前后的两组髋关节所受最大力矩,计算出外骨骼装置的省力数据。
在ADAMS软件中,利用前文中的人体模型进行搬运5 kg和15 kg重物的动力学仿真,得到的仿真结果如图13和图14所示。

图13 穿戴外骨骼前髋关节所受力矩变化
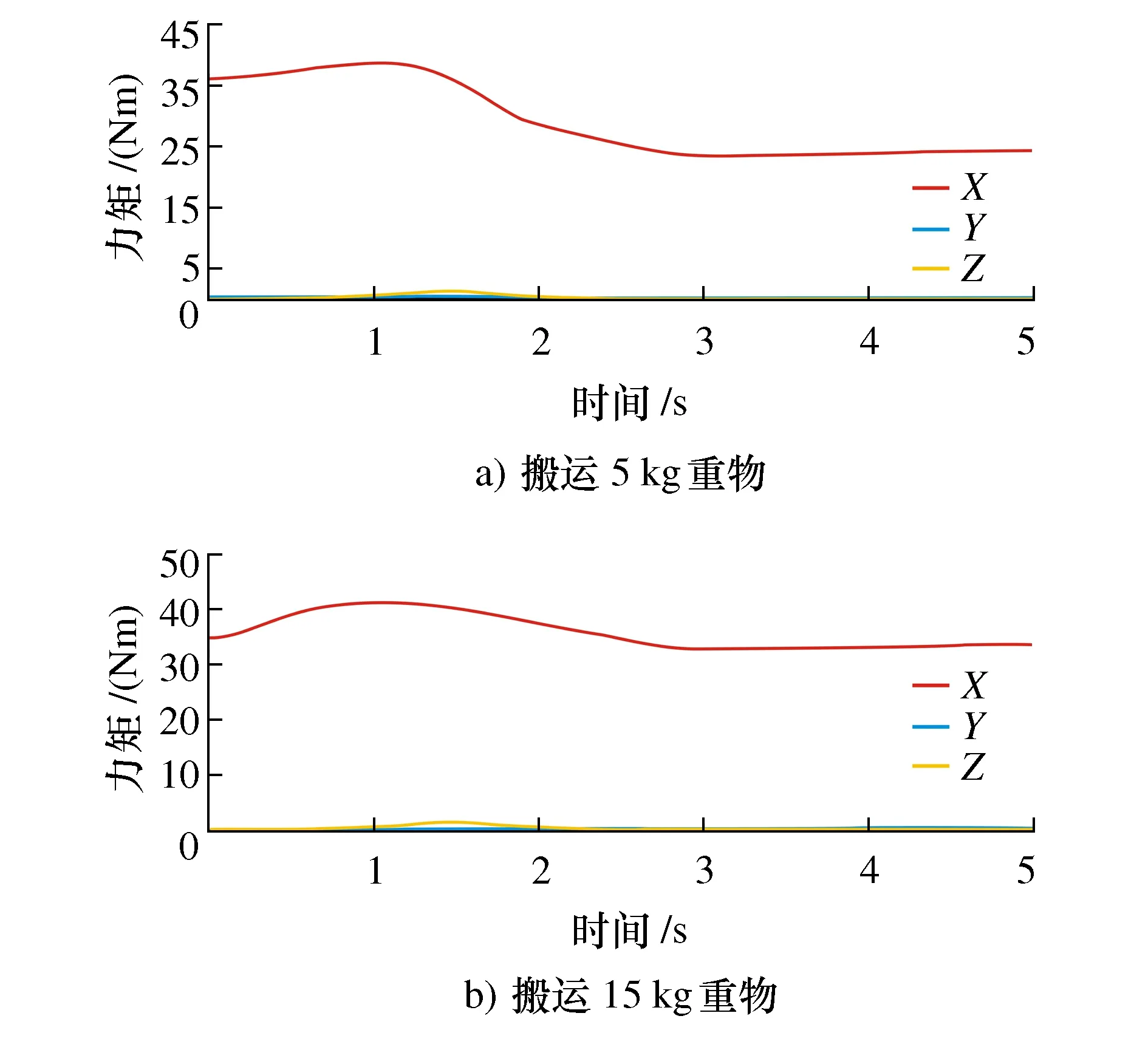
图14 穿戴外骨骼后髋关节所受力矩变化
由图13和图14可以看出,在搬运5 kg的重物时,未穿戴外骨骼,髋关节所受的最大力矩约为65 Nm,而穿戴外骨骼后约为24 Nm。在搬运15 kg重物时,未穿戴外骨骼,人体髋关节所受的最大力矩约为88.5 Nm,穿戴外骨骼后,约为33 Nm。
通过计算得知,人在搬运5 kg和15 kg的重物时,穿戴外骨骼后髋关节所受力矩较不穿外骨骼时分别减少了约63%和62.8%。前文计算出搬运25 kg重物时,髋关节所受力矩减少了63%,由ADAMS仿真结果可以得出该外骨骼装置在搬运5~25 kg的重物时,髋关节所受力矩减少约63%。所以本文设计的外骨骼省力装置的省力程度为搬运5~25 kg重物,髋关节约省力63%。
3.4 人机工程舒适度分析
为了验证本文提出的无腰腰部助力外骨骼的髋关节设计的舒适性,选择CATIA软件中的人机工程学设计与研究模块对人体弯腰搬运重物的姿势进行仿真分析[21]。在CATIA软件中,以H点(髋关节所在点)为基准点,导入一个百分位50的中国男性模型。在人体模型构造中编辑人体模型的各个关节的姿态,得到一个姿势为弯腰蹲下搬运重物且髋关节无外展的人体模型,在模型姿势分析板块中对模型的姿势进行舒适性分析。
在进行姿势评估之前,先确定人体模型的各个部位的关节的自由度,然后对不同的自由度划分角度值和舒适度值。在姿势评估期间,CATIA软件的姿势分析模块将依据当前姿势下每个部位的角度和分值进行计算,最后得到每个姿势的舒适度评价分数[22]。
考虑到搬运中人体上半身的活动范围,如图15所示,除了分析向前弯姿势外,还分析上半身向左前弯与右前弯的情况,通过分析确定评估姿势为以下6种:向前弯曲髋关节二自由度、向前弯曲髋关节四自由度、向左前弯曲髋关节二自由度、向左前弯曲髋关节四自由度、向右前弯曲髋关节二自由度、向右前弯曲髋关节四自由度。在CATIA中分析这些姿势舒适程度,主要对比髋关节二自由度、四自由度的舒适度。
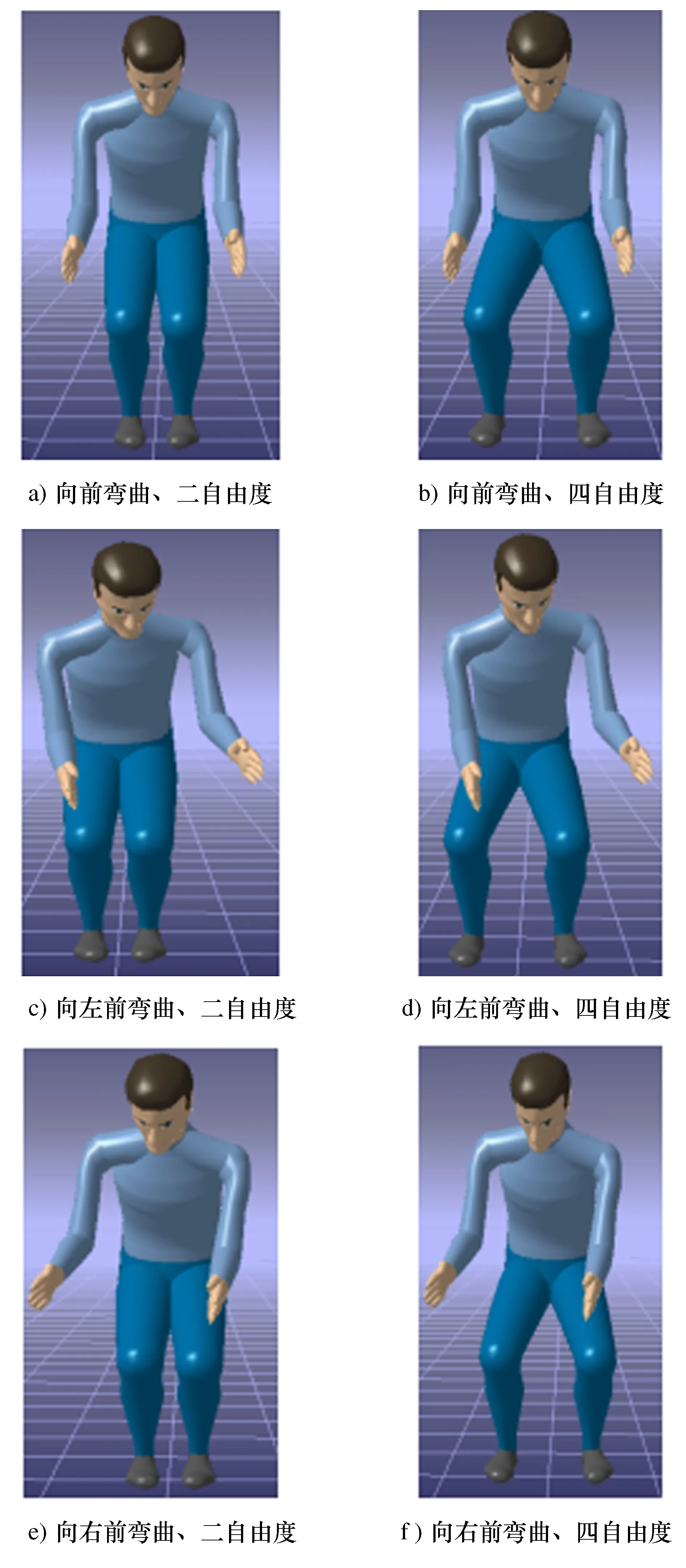
图15 进行舒适度分析的6种姿势
根据所学的人机工程学知识,对人体模型的髋关节DOF2自由度进行活动范围划分,对比搬运过程中髋关节有无外展角度时的舒适度。表4列出了6种不同姿势下髋关节二、四自由度的舒适度分数。其中,在人上半身向前、向左前、向右前时,髋关节四自由度舒适度分数高于二自由度舒适度分数。

表4 不同姿势下二、四自由度的舒适度分数
通过CATIA的人机工程学仿真分析,可以证明在弯腰搬运重物时,搬运姿势为髋关节四自由度时,能够让人更舒适,所以在外骨骼方案设计中,增加髋关节外展/内收的自由度,使髋关节四自由度时可以有效提升人穿戴装置的舒适性。
4 结论
设计了一种无源髋关节助力外骨骼,该外骨骼无需电池利用自身机械结构省力,轻便节能,且髋关节有4个自由度,能够满足用户较高的穿戴舒适性需求。本文首先对搬运中腰部进行生物力学分析,确定腰部肌肉的受力原理,提出外骨骼助力方案。在髋关节连接处材料设计为弹性带,增加装置使用时髋关节的外展/内收活动范围,将活动空间从一维度扩展到了二维度。再进行外骨骼省力结构的设计和材料的选取,动力学仿真与静力学仿真数据证实了外骨骼助力方案的可行性,所选材料最优结果为搬运25 kg重物省力63%,且在搬运5~25 kg范围内的重物时,省力程度均在63%左右。接着进行CATIA人机工学分析髋关节四自由度、二自由度搬运姿势时人体的舒适度,验证髋关节四自由度时装置的舒适度更高。本文设计并证实了一个有效的符合人机工程学的无源髋关节助力外骨骼方案,下一步的研究任务在于制作样机并进一步研究验证可行性。
