车辆自适应巡航分层控制系统的联合仿真研究
2022-05-19张丽萍刘志刚谢黎明
张丽萍,刘 猛,刘志刚,谢黎明
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121001)
1 引言
自适应巡航控制是从传统的定速巡航模式发展而来的,现在是主动安全领域研究的热点,它可以随着车辆当前行驶环境的变化,通过安装在车头前端的雷达探测到相对位置和速度等信息和巡航控制器计算出此时自车的期望加速度值,能及时的控制自车加速或者减速,与前车保持更好的安全车距和相对速度,因此可以充分提高驾驶的舒适性和车辆的主动安全性。
目前,对ACC系统的巡航控制器和控制策略进行大量研究,巡航控制器的控制算法有:MPC控制算法、神经网络控制算法、模糊逻辑控制算法、滑膜控制算法等。控制器的控制结构有:分层控制和整体控制。文献[1]是整体控制结构,在这里提出了一种模糊理论控制方法的控制器,主要研究了车距控制策略。文献[2]是分层控制结构,上层是基于最优控制方法的控制器,下层是PID算法控制,主要研究了前车紧急制动工况控制策略,文献[3]整体控制结构,提出了基于模糊PID的控制理论的巡航控制器,并且主要考虑了定速模式和跟车模式之前的切换策略,文献[4],是用分层控制结构,上层同样使用基于最优控制理论的巡航控制器器,下层控制器根据加速度值对车辆进行实时控制,主要考虑了车辆在行驶过程中的启停工况的巡航控制策略。文献[5]分层控制结构,上层控制器采用最有控制理论,下层控制器使用模型匹配控制策略能较好适应不同工况并且充分考虑了车辆的纵向,侧向和垂向的耦合特性。文献[6]整体控制结构,应用MPC控制算法的巡航控制器对车辆进行合理的控制,实现车辆由定速巡航控制到跟车巡航的切换策略。这里充分考虑到ACC系统的安全性和跟车性,同时也考虑到节气门开度和制动压力对成员舒适性的影响。首先在Prescan软件上设置车辆参数建立并生成了车辆动力学模型其中包括驾驶员模型和发动机模型以及液力变矩器等模型,这些模型精确度高并能很好的反映系统的动态特性。在Simulink中建立逆纵向动力学模型,然后基于最优控制理论设计了具有分层结构的巡航控制器,最后进行Prescan和Matlab/Simu⁃link的联合仿真分析,对两种典型的汽车行驶工况进行了仿真验证,并与文献[1]提出的模糊算法进行了对比和分析,且只需对比自车速度和加速度即可得出相应结论。
2 汽车自适应巡航系统总体方案
汽车纵向运动的控制,需要多个模块相互配合来完成,首先通过安装在车前方的雷达系统收集前方车辆和道路信息,控制系统的作用是通过雷达和车身上的传感器收集到的本车和前车的信息能够计算出两车之间理论的安全距离,通过安全距离的大小决定本车期望加速度a_des的值。上层控制器输出的期望加速度值作为下层控制器的输入值,车辆逆纵向动力学模型根据上层控制器的输出的期望加速度a_des,从而能得到对应的节气门开度α_des和制动压力P_des,用这两个值来控制车辆纵向动力学模型,控制车辆的加速或者减速,最后实现自适应巡航的功能。自适应巡航控制系统总体方案,如图1所示。

图1 自适应巡航控制系统的总体方案Fig.1 General Design Scheme of Automobile Adaptive Cruise System
3 虚拟交通场景及车辆动力学系统建模
3.1 虚拟交通场景建立
这里采用汽车主动安全Prescan仿真软件,它能够更好的模拟真实的交通场景以及车辆行驶工况,构建虚拟的道路条件和交通场景,在车辆前端放置TIS雷达并配置雷达参数,对模拟真实的行车工况进行仿真,验证这里控制算法和策略的有效性。这里设计了两种交通场景,一种场景是自车跟随前车减速直至停止,另一种场景是自车正常行驶时前车突然插入并跟随前车运动。
3.2 车辆纵向动力学模型建立
由车辆在行驶过程中的纵向受力情况,可建立运动方程如下:

式中:m—整车质量;
Ft f—车辆的前轮驱动力;
Ft r—车辆的后轮阻力;
Fa—空气阻力;
Ff—路面摩擦力。
在Object configuration-Dynamics customize 中对车辆的运行参数进行设置,即可生成动力学数学模型。设置参数,如图2所示。
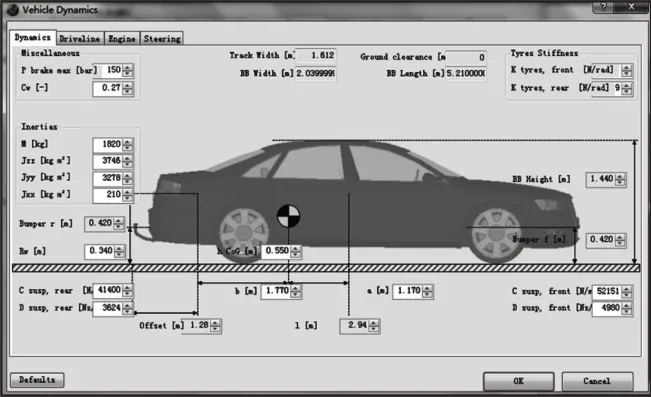
图2 车辆动力学模型设置Fig.2 Vehicle Dynamics Model Settings
4 车辆自适应巡航控制系统的设计
实际道路的行驶工况复杂多变,因此ACC系统应该具有合理的控制巡航车的车速随目标车的车速变化而进行相应调整的能力。这里采用分层控制结构,上层控制器根据雷达和自身的传感器获取到的相关行车信息进行分析,计算出此时期望加速度,下层控制器在考虑车辆自身参数和外界干扰等情况下,对车辆实时的控制,从而迅速、精确的实现期望的加速度。
自车与前车的运动学关系,如图3所示。

图3 ACC纵向运动学示意图Fig.3 ACC Longitudinal Kinematics Diagram

式中:Δd—两车间距误差;Δv—相对速度;d—实际车距,ddes—期望车距;vp—前车速度;vf—自车速度。
这里用固定车间时距来代替期望车间时距,即

式中:th—车间时距;
d0—停车时两车之间的最小安全车距。
可用1阶惯性环节表示ACC车辆的实际加速度af和期望加速度afdes关系,即:

式中:KL—系统增益;TL—时间常数。
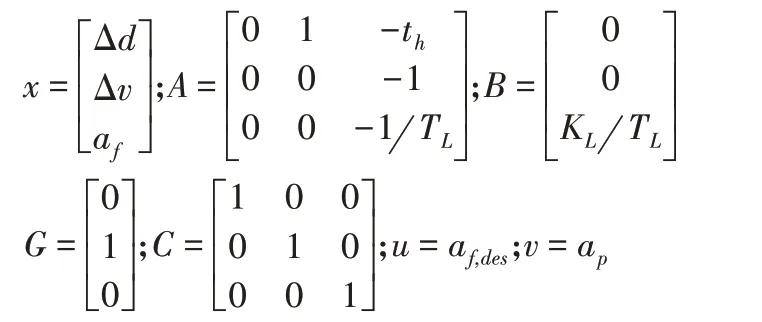
以Δd,Δv和af作为状态变量,以af,des作为控制输入量,把ap作为系统的扰动,可得状态方程如下所示:

其中,
巡航系统控制目标是要求Δd和Δv同时趋近于零。
经过大量的实验分析和验证[6],可知自车加速度值越小,乘客的乘坐舒适性和跟车适应性就越高,即寻求
所以,取最小跟车期望加速度控制指标函数为:

式中:q1—车距误差;q2—相对速度;q3—自车加速度的加权系数;r—控制输入量的加权系数,主要限制控制量的抖动。
最优控制的目的就是要寻求最小的控制指标J。
5 Prescan与Matlab/simulink联合仿真
由荷兰TNO 公司(1932年成立)开发的Prescan是当前全球范围内处于领先地位的车辆主动安全仿真软件,它以物理模型为基础,支持摄像头、雷达、激光雷达、GPS、车车通信等多种主动安全系统的开发应用。Prescan 能够快速建立车辆行驶的模拟场景,并提供Carsim、Matlab/Simulink 等其他软件良好的开发接口进行联合仿真。Prescan软件中自带车辆动力学模型和外部接口且车辆动力学参数也较精确。在Prescan的GUI模块中设置车辆动力学模型的参数,搭建车辆和道路环境等交通场景,将工作区域设置好的各个模块分析、建立并导入Matlab/Simiulink 中得到联合仿真模型,在Simulink中我们会看到所设置的各种模块。在自动生成的Simulink环境下设计巡航控制器、逆纵向动力学模型等。联合仿真模型,如图4所示。
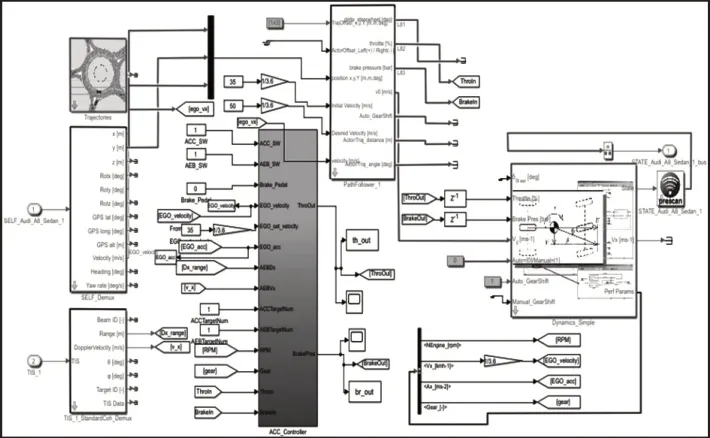
图4 基于Prescan的联合仿真控制模型Fig.4 Joint Simulation Control Model Based on Prescan
6 系统仿真验证
6.1 加速跟随工况
仿真结果,如图5所示。最优控制下的自车比模糊控制响应更灵敏更具有快速性。(0~7)s 内由于ACC 车辆没有探测到前方车辆,属于无目标的状态,此时进行的是巡航控制,从初始速度升高到巡航车速,当7s时。主车在前方雷达系统检测下识别前方车辆,因自车车辆速度大于前车,此时速度发生突变,自车车速响应及时且没有超调,随着前方车辆的速度减小而减小,(7~40)s 时前车匀减速运动时直至停止,自车始终保持跟车状态,虽然自车车速变化有一定的滞后,但在合理范围内。相对于模糊控制,最优控制下的自车最大减速度和整体变化幅度更小,如图6所示。在7s时,检测到前方车辆自车加速度迅速降低,从而来避免与前车相撞,但减速以后还要继续跟随前车,所以从8s 开始,加速度在缓慢上升并且自车加速度变化范围适中,降低了过大的减速度对乘坐舒适性的影响。表示自车在最优控制下的制动压力,如图7所示。在(0~7)s为无目标状态,没有检测到前车,车辆无需制动操作,7s时检测到前车,随着前车速度改变的快慢自动调节制动缸压力的大小,随时间变化而慢慢变化,无突变现象,在保证制动效果的前提下,又兼顾乘员的舒适性。表示在最优控制下的节气门开度,如图8 所示。前7s 主车进行的是巡航控制。有节气门请求,没有突变现象,7s 时主车检测到前方车辆,因为主车速度比前车大,此时开始制动,没有节气门请求,控制效果良好。
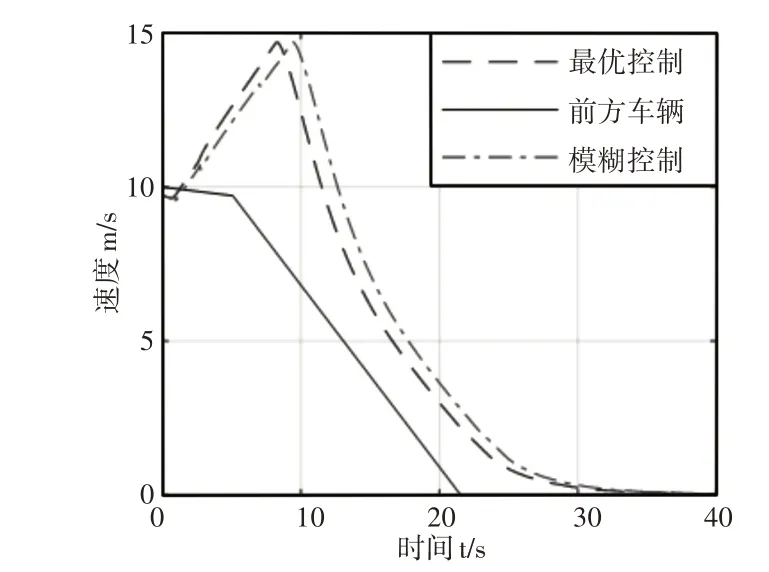
图5 速度变化曲线Fig.5 Velocity Change Curve

图6 加速度变化曲线Fig.6 Acceleration Curve

图7 制动压力变化Fig.7 Braking Pressure Change

图8 节气门开度变化Fig.8 Throttle Opening Change
6.2 前车插入工况
仿真结果,如图9所示。自车在最优控制算法下18s时追上前车,而在模糊控制下自车20s左右追上前车,而且与模糊控制相比,在最优控制下自车追赶前车的过程中速度变化相对较好。8s之前主车辆从初始速度开始进行巡航控制,速度迅速上升,当8s时,前车突然插入,主车辆为避免碰撞且保证合适的跟车间距做出必要的速度调整,自车能及时减速,并在匀减速行驶时,自车速度与前车速度几乎保持相同;相应的从如图10所示的仿真结果中我们可以看出,与模糊控制相比,最优控制下的自车加速度的整体变化幅度更小。在8s时,前车突然插入,为了避免与前车发生碰撞,加速度的值也出现了激降的现象,在8s之后随着前车继续匀减速行驶,加速度的值也开始升高在0附近波动,稳定跟随前车匀减速运动,上层控制器计算的期望加速度大小,没有突变,基本处于稳定状态,且自车实际加速度的变化能精确并快速的反应主车辆在道路上的实际行驶工况。在最优控制下的开始时自车进行的是巡航控制无需制动请求,如图11所示。此时制动力为0,由于在8s时前车的突然插入,自车通过雷达检测到前方车辆时,上位机为了避免碰撞通过计算分析,给下位机较大的减速度,下位机及时做出响应,此时主车采取紧急制动,制动压力迅速升高,8s后要跟随前车所以无需制动压力,同样的从如图12所示的仿真结果中可以看到,在最优控制下,试验刚开始时进行的是定速巡航控制,有节气门请求,当8s时,主车辆进行的是制动请求,节气门关闭,但在8s以后主车辆要跟随前车所以节气门开启,由图可以看到节气门开度可以确保在加速过程不会太剧烈,且加速响应又很灵敏。

图9 速度变化曲线Fig.9 Velocity Change Curve
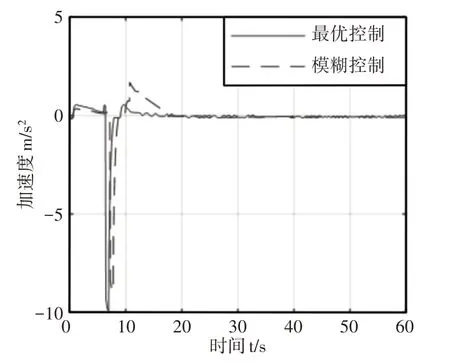
图10 加速度变化曲线Fig.10 Acceleration Change Curve

图11 制动压力变化曲线Fig.11 Braking Pressure Curve

图12 节气门开度变化曲线Fig.12 Throttle Opening Curve
7 结论
(1)由Prescan所建立的车辆动力学模型与实际车型的结构特性相同,车辆动力学系统能够很好的执行巡航控制器发出的命令请求,基于Prescan 软件联合仿真,更加真实的模拟了行车环境,使仿真结果更加真实,可信。
(2)从两种工况的仿真结果来看,巡航控制器能在定速巡航和跟车模式之间切换顺畅,响应较快。当前车紧急制动时,本车能够快速地减速,这里制定的巡航策略可以在紧急行驶工况下主动进行干预并控制,从而避免交通事故发生,极大的提升了汽车安全性能。在跟车模式时,较准确地跟随前车运行,车速随前车变化而改变。因此,这里设计的巡航控制器保证汽车的良好的跟踪性、安全性和适应性。这为车辆主动安全技术的深入研究奠定的一定的基础。