ADAS实验平台转向路感模拟的实现
2022-05-19许广吉
石 晶,许广吉
(辽宁工业大学研究生学院,辽宁 锦州 121001)
1 引言
驾驶模拟器相比较于传统车辆在进行道路测试时,不需要消耗大量的人力、物力以及受天气、地形等环境影响,并且在极限工况下不会发生交通事故等一系列缺点。因此,用驾驶模拟器来代替实际车辆进行相关测试。路感是指车辆的运动状态和轮胎的受力情况通过机械连接凭借方向盘反作用力传递为驾驶员[1]。
目前,国内外研究人员对方向盘力矩反馈的研究主要有两种:(1)将转向系统的各个部分进行分析并搭建模型;(2)将转向系统看做是一个整体,搭建的模型需要考虑转向轮回正力矩和整个转向系统等效到转向轴上的刚度、阻尼、摩擦及惯量等因素。文献[2]将线控转向(SBW)系统方向盘回正力矩模型建立成前轮转角和车速的函数,模型中考虑了车轮回正力矩、系统惯量及阻尼。文献[3]建立了包含车轮回正力矩、系统刚度、惯量及阻尼的方向盘回正力矩,并且以车辆运动参数为状态变量,以方向盘力矩为输出量的车辆运动状态方程。这里采用第二种方法实现对方向盘力矩的反馈,研究人员主要是通过选出对路感影响比较大的参数,并且按照实车路感对参数进行加权拟合,而这里所选择的参数是在CarSim 中选取的,其参数具有一定的准确性。
ADAS实验平台中驾驶模拟器的转向系统与实际车辆在转向系统的结构有所不同,只有方向盘、转向管柱和转角传感器。为了使驾驶模拟器在仿真过程中更真实地模拟车辆的运动情形,以满足各种条件下的车辆道路试验[4]。因此,在本实验台的驾驶模拟器中安装路感电机,故能够更好地与实车相似。
2 ADAS实验平台
该实验平台主要是由驾驶模拟器、主控PC、实时系统和快速原型控制器组成[5]。驾驶模拟器转向系统结构,如图1所示。本实验台采用7线SX-4300转角传感器,并且主要用来检测方向盘的转角和转动方向,然后将测得到的信号传输给实时系统,经过处理用CAN通信传递给路感电机输出的阻力矩[6]。

图1 ADAS实验平台Fig.1 ADAS Experimental Platform
本实验平台主要是通过局域网、CAN进行通信,以汽车动力学仿真软件(CarSim)为核心进行仿真验证,通过实时系统采集驾驶模拟器的转向、制动、加速和档位系统的信号,再通过CAN通信传递给快速原型控制器,经过其控制策略和算法,计算出所需要的信号,计算出的是转向系统信号将其通过CAN通信驾驶模拟器的转向系统的执行机构,若是其余信号则通过局域网反馈给CarSim即可。路感电机实物图,如图2所示。驾驶模拟器转向系统结构,如图3所示。
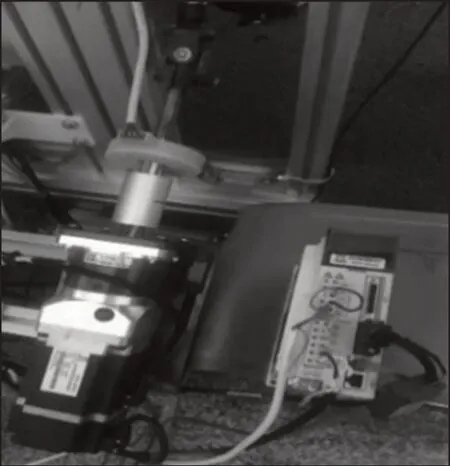
图2 路感电机实物图Fig.2 Road Sense Motor Physical Map
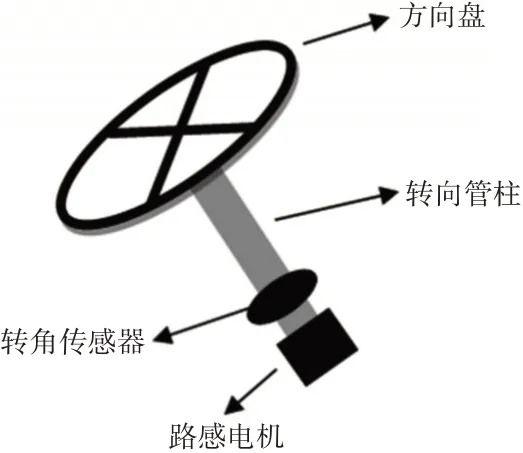
图3 驾驶模拟器转向系统结构Fig.3 Driving Simulator Steering System Structure
3 方向盘回正力矩计算
方向盘回正力矩主要是由车轮回正力矩、转向系统刚度、阻尼、惯量和摩擦力等力矩之和。通常将总的回正力矩与转向系统的传动比的商为路感[7-9]。
3.1 车轮回正力矩
车辆在行驶时,由于车速的不同,车轮产生的回正力矩也是不同的,所以分为两种情况(1)高、中、低车速(速度大于10km/h)、(2)极低车速或原地转向(速度小于等于10km/h)。
当车辆在低、中、高车速下行驶时,车轮回正力矩包括前轮垂直载荷和前轮侧向力分别产生的回正力矩[10],车轮回正力矩主要受主销内倾角和外倾角影响。
其中前轮垂直载荷产生的回正力矩表达式为:

式中:MZ—前轮垂向载荷产生的回正力矩;Fzl和Fzr—左、右车轮的垂直载荷;e—主销內移量;ω—主销内倾角;ε—主销后倾角;θ—前轮转角。
前轮侧向力产生的回正力矩表达式为:

式中:ML—前轮侧向力产生的回正力矩;Fyl和Fyr—左、右轮的侧向力;R—车轮的滚动半径;Tp—气胎拖距。
因此,车轮产生的回正力矩表达式为:
当车辆在极低车速或原地转向时,车轮的回正力矩表达式为:

式中:Mf—极地车速或原地转向的回正力矩;f—地面与轮胎之间滑动摩檫系数;Fz—前轮垂直载荷;P—轮胎气压。
3.2 转向系统刚度、阻尼、惯量和摩擦力阻力矩
转向系统刚度产生的力矩表达式为:

式中:MS—转向系统刚度阻力矩;KS—转向系统中的刚度;α—方向盘转角。
转向系统阻尼产生的力矩表达式为:

式中:MD—转向系统阻尼阻力矩;KD—转向系统中的阻尼;α—方向盘角速度。
转向系统转动惯量产生的力矩表达式为:

式中:MI—转向系统转动惯量阻力矩;KI—转向系统中的转动惯量;α—方向盘角加速度。
转向系统摩擦产生的力矩表达式为:

式中:MF—转向系统摩擦阻力矩。
根据参考文献[11]可知,由于这里采用的是电动助力转向,轮胎将产生的部分回正力矩反馈给驾驶员。只有从转向轴的输入力矩传递到驾驶员的手中,这里所做的就是求出转向轴输入力矩占轮胎回正力矩的比例[12],即WA。

式中:MH—转向轴输入力矩;
i—转向系统的传动比,其表达式为:
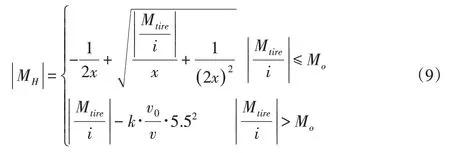
式中:v—当前车速;v0—基准车速(这里选取10km/h);k—常数(k=2.5);x和Mo表达式如下所示:

综上所述,路感电机反馈方向盘的总力矩表达式为:
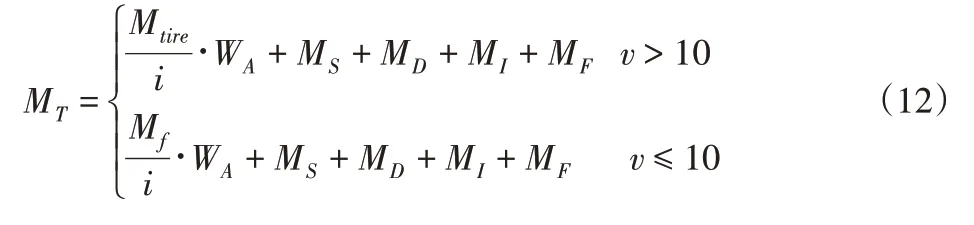
式中:MT—路感电机反馈方向盘的总力矩。
4 硬件在环仿真验证
4.1 ADAS实验平台硬件在环仿真流程
在ADAS实验平台路感模拟验证中。首先,分别将Simulink模型和CarSim 进行编译,将编译的文件导入所建立的NI-Veri⁃stand 中,并且设置驾驶模拟器的采集、传输信号接口;其次,在NI-Veristand中将导入的文件的输入、输出接口和驾驶模拟器信号进行映射;最后,将计算出来的力矩通过CAN通信传递给驾驶模拟器路感电机。硬件在环[13]流程图,如图4所示。方向盘回正力矩Simulink模型,如图5所示。
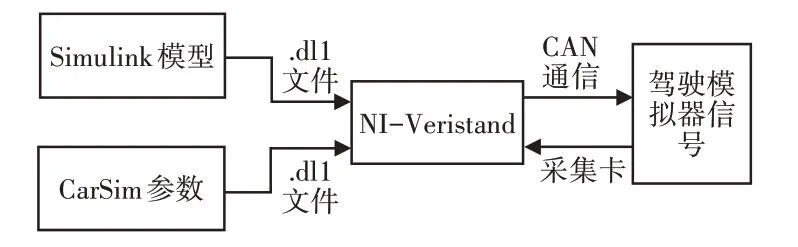
图4 硬件在环仿真流程图Fig.4 Hardware-in-the-Loop Simulation Flow Chart
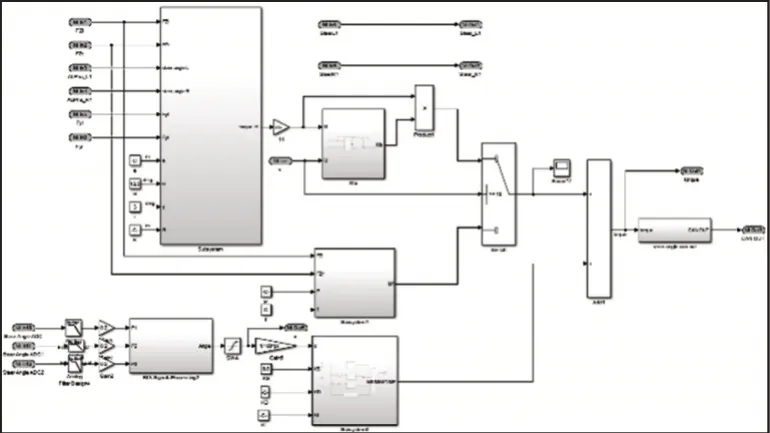
图5 方向盘回正力矩Simulink模型Fig.5 Steering Wheel Returning Moment Simulink Model
4.2 CarSim整车模型参数
实验仿真车速初始条件分别为10km/h、80km/h。由于车速在小于等于10km/h时,轮胎和地面充分接触,车轮与地面之间主要为滑动摩擦,滑动摩擦是和车轮的垂直载荷成正比的,因此产生的阻力矩很大,造成低速时转向沉重。根据文献[1]可知,采用车速为80km/h进行仿真。仿真车辆参数,如表1所示。
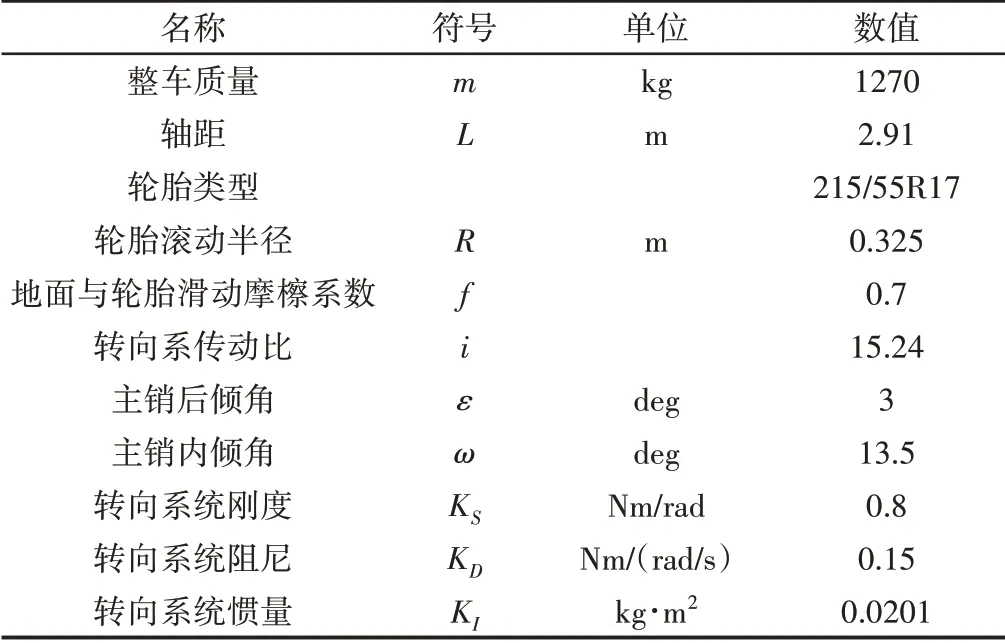
表1 车辆参数Tab.1 Vehicle Parameters
4.3 验证结果
在ADAS实验平台进行路感模拟验证,在不同的车速下,转动不同方向盘转角(α),得到的方向盘反馈力矩也是不同,如图6、图7所示。仿真车辆能够很好的按照道路行驶,能够较好的反馈给驾驶员当前路况。
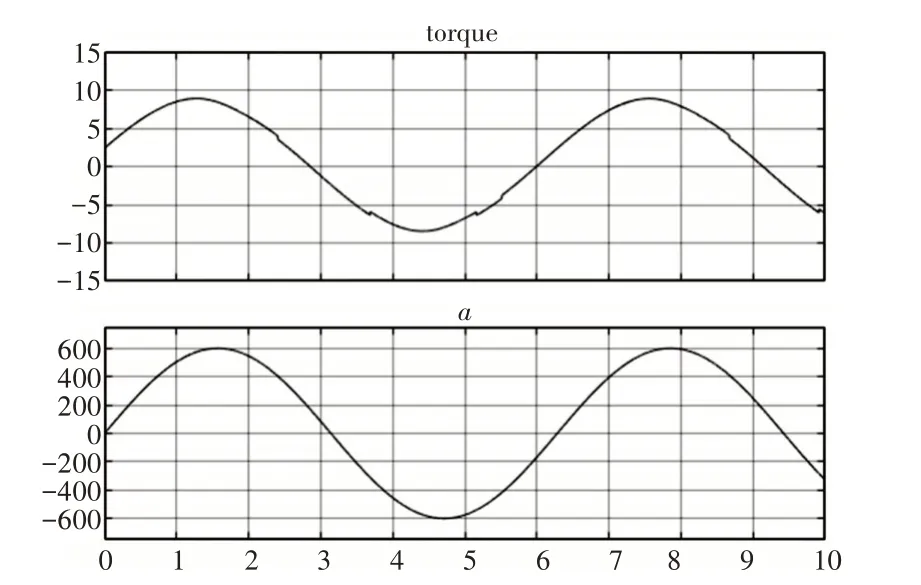
图6 极低车速或原地转向方向盘转角、反馈力矩Fig.6 Very Low or In-Situ Steering Steering Wheel Angle,Feedback Torque
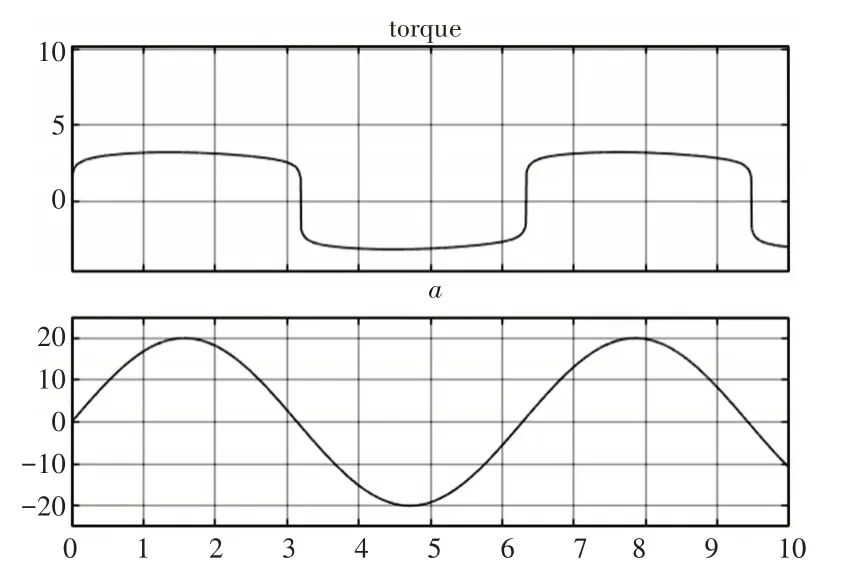
图7 高、中、低车速方向盘转角、反馈力矩Fig.7 Low,Medium and High Speed Steering Wheel Angle,Feedback Torque
5 结论
这里提出以10km/h为基准车速,分为大于10km/h和小于等于10km/h车速两种情况计算回正力矩,第一种情况主要受车轮产生的回正力矩影响;第二种情况主要受滑动摩檫影响。在ADAS 实验平台进行实验验证过程中,分别以10km/h 和80km/h的车速行驶,并且分别转动(-600~600)°和(-20~20)°。其中,在各自的车速中的方向盘反馈力矩范围大约在(-4~4)Nm和(-10~10)Nm左右。最后,ADAS实验平台路感模拟硬件在环仿真实验能够较为理想的反馈给驾驶员的当前路径情况,并且车辆能够按照当前路径或驾驶员意图进行行驶。