多级串联明渠调水工程多目标水位预测控制模型研究
2022-05-19孔令仲雷晓辉
孔令仲,雷晓辉,张 召,朱 杰,王 浩
(1.扬州大学 水利科学与工程学院,江苏 扬州 225009;2.河海大学 水利水电学院,江苏 南京 210098;3.中国水利水电科学研究院 水资源研究所,北京 100038;4.河北工程大学 水利水电学院,河北 邯郸 056038;5.北京工业大学 城市建设学部,北京 100124)
1 研究背景
修建大型调水工程是解决水资源时空分布不均的重要手段[1]。因施工投资小、输水流量大、施工维护便捷,明渠输水已成为大型调水工程的常用输水方式。明渠调水工程中以节制闸或泵站为调控建筑物,这些调控建筑物将调水工程分隔成多个渠池,每个渠池可被看作一个上、下游水位不等的水库。明渠渠池的水位与流量状态不能用水位-流量-蓄量关系描述,主要在于渠池的蓄水能力相对较小,水面在流量扰动下变幅相对较大,调控过程中并不能将当前水位状态当作为稳定状态,还需要考虑水位变化速率对未来状态的影响;而且明渠中的水位波动为重力波,其传播速度相对较慢,调控设备的调控对控制点水位和流量的影响时滞较大,调控作用的后效性较为显著。明渠的水力控制应当综合考虑以上水力特性,来确定调控设备的调控方案。明渠调水工程的水力控制目标主要以安全控制和输水稳定控制为主[2],即控制河渠水位和输水流量在合理的范围;而在泵站作为主要调控建筑物的明渠调水工程中,水力控制还需要考虑泵站运行效率的问题[3]。
在明渠调水工程的水力优化控制中,扰动的不确定性及水工建筑物的水力参数不确定性,导致明渠的状态难以直接用仿真模型进行长序列精确预测,基于仿真模型一次离线优化得到的优化调控策略可能无法在长时段内适用,因此长期有效的明渠调水工程水力优化控制应当是滚动的决策优化[4]。预测控制正是这一类采用了滚动优化策略的控制算法,其在线反复进行优化计算,滚动实施,使模型失配、畸变、扰动等引起的不确定性及时得到弥补,从而得到较好的动态控制性能[5]。在明渠水力预测控制中,明渠状态的预测模型一般不直接采用由圣维南方程组构成的仿真模型,而是采用近似简化模型,比如蓄量模型[6]、积分时滞模型(Integrator-Delay model)[7]、简化圣维南方程(Reduced Saint-Venant model)[8]等。简化模型虽然不能精确地描述控制对象的动态特性,但是在预测控制模式下,简化模型可根据实时反馈信息对模型进行修正,在反馈间隔较短且预测期较短的情况下能保持较好的滚动预测与控制效果。基于以上简化模型,国内外学者开展了预测控制算法在渠道水位控制方面的研究。Wahlin[9]首次讨论了基于积分时滞模型的渠道预测控制算法设计,并且通过仿真模型证实了算法在渠池水位调控上的有效性;Overloop 等[10]将基于积分时滞模型的预测控制算法应用于实际的工程渠道中,结果显示在预测控制算法调控下,渠池的水位偏差相对较小,从而可维持稳定的输水流量。Hashemy Shahdany 等[11]在明渠进出口流量不平衡情况下,通过基于积分时滞模型的预测控制算法来保持各个渠池的水位偏差尽可能一致,以延长这种极端工况下的持续供水时间。Xu等[12]基于简化圣维南方程构建了明渠水位水质预测控制模型,用于控制渠池中的控制点水位及污染物浓度与目标值之间的偏差。在这些研究中,预测控制的水力调控目标形式都较为单一,主要以控制状态与预期值的偏差平方值与控制动作平方值之和最小为调控目标[13]。这种形式的控制目标在进行优化问题求解时具有一定的优势,能满足优化问题为凸规划因而可采用梯度算法来进行快速求解,但实际工程中的很多问题并不是凸规划问题,维持调控目标为二次规划形式也限制了预测控制在实际工程中的应用场景。因此,本文尝试采用能处理多目标优化问题的启发式算法来进行预测控制问题求解,并将预测控制的目标不再限制于传统的二次规划形式,而是根据实际的调控问题加入形式较为复杂的目标函数,比如在本文案例中除了有水位偏差量目标及调控动作量目标以外,还加入了非连续函数形式的节制闸调控次数目标,以初探预测控制在处理复杂水力控制问题方面的可行性。
本文以南水北调中线干线工程的最后6 个渠池为研究案例,同样以水力安全控制为目的开展预测控制算法研究。为满足中线干线工程在日常调控过程中对节制闸调控次数尽可能少的实际需求,在控制目标中加入了节制闸调控次数目标,并通过带有精英排序策略的遗传算法来进行优化控制问题求解。通过将此预测控制模型应用于研究案例的虚拟仿真渠道以检验控制模型的有效性。其中,虚拟仿真渠道的状态量中只有节制闸前、后的水位状态可被预测控制模型感知,以符合工程中只有节制闸前、后水位被实时监测的实际情况。
2 基于积分时滞模型的渠池水位预测控制概述
2.1 积分时滞模型常规的水动力模拟方法中,模型初值基于恒定流假设得到,这样计算得到的模型仿真结果可能与研究对象的实际情况偏差较大,不能满足实时调控的需要。国内外学者开展了大量的研究来实现明渠或河道的实时状态感知与状态预测,主要采用的方法为简化模型方法[14]、数据同化方法[15]及神经网络方法[16]。其中,数据同化方法和神经网络方法由于需要大量的计算来实现对模型初始态的感知,因此在大型多级串联渠道中的预测及调控应用较少。而简化模型因为结构简单、实时状态更新计算量小,因此被广泛地应用于调水工程的实时预测调控中。简化模型以Schuurmans 等[14]提出的积分时滞模型为代表,此模型采用以下公式来描述控制点水位偏差与渠池进、出口流量变化量之间的关系:

式中:e为渠池下游水位控制点的水位相对于目标水位的偏差量,m;t为时间,s;qin为渠池入口流量相对于初始状态的变化量,m3/s;qout为渠池出口流量相对于初始状态的变化量,m3/s;qofftake为渠池分水量相对于初始状态的变化量,m3/s;Ad为回水区面积,m2;τd为渠池的滞后时间,s。参数Ad和τd可通过公式计算[17]、仿真结果关系拟合[18]或者实测数据关系拟合[19]得到。虽然渠池特性会随着渠池运行状态的改变而变化,但是参数Ad和τd的变化一般相对较小,而且预测控制中可通过实测数据进行预测水位值修正,因此一般在控制算法设计中将Ad和τd设为定值[20]。这种处理方法没有考虑明渠的非线性水力特性,使得在明渠水位或输水流量变幅较大的情况下预测控制模型的预测精度降低,无法保证模型生成的实时调控方案为最优方案;但是由于在预测控制模型中,被控对象只执行控制策略中对应于面临时刻的调控指令,而此调控指令是根据实时状态及第一步的预测结果制定的,具有较高的可靠性,因此控制模型仍能实现较好的控制效果;相关研究也表明,选取多个工况下相对较小的参数Ad和相对较大的τd能显著提高控制模型的鲁棒性[21]。
2.2 预测控制基本逻辑预测控制主要由三部分组成:预测模型、预测与优化、指令执行与反馈[22]。预测模型是预测控制用来预测研究对象未来的状态和系统输出的模型;基于预测模型,可通过设置控制目标来建立优化问题,通过求解问题得到最优的控制方案序列;最优的控制方案序列中,只有临近步的控制方案被执行,执行之后的系统状态信息会被反馈到预测模型,实现预测模型的更新;然后再进行下一步的优化与执行。这样,在每一个时间步通过反复的预测和优化来求解优化问题。预测控制基本逻辑见图1 所示。

图1 预测控制逻辑图
2.3 基于积分时滞模型的预测控制状态空间方程预测控制使用能描述研究系统的动态特性的预测模型来预测研究对象未来的输出过程。预测模型的状态空间形式将用于状态预测与优化计算。研究系统的线性时不变状态空间形式可用以下形式描述:

式中:x(k)为状态变量;y(k)为输出变量;u(k)为控制输入变量;d (k)为扰动变量;A为系统矩阵;B 为控制矩阵;D 为扰动矩阵;C 为对角矩阵形式的输出矩阵。
积分时滞模型方程(1)可写成离散形式

式中:Ts为控制间隔时间,s;kd为滞后步长,kd=τdTs。将方程(4)的上一步展开并与方程(4)相减,可得

式中:Δe(k)=e(k)-e(k-1) 为e(k)相对于上一步的增量;同理,Δqin(k)、Δqout(k)和Δqofftake(k)分别为qin(k)、qout(k)和qofftake(k)相对于上一步的增量。方程(5)和方程(6)可写为矩阵形式的方程(2),再通过建立方程(3)转换得到只有预测水位偏差值的输出量y(k)。
2.4 预测控制目标形式及其求解预测控制目标的通用形式为:

式中:J为需要最小化的目标函数;y()k+j|k为系统根据k时刻初始状态预测的未来k+j时刻的输出变量;yr()
k+j|k为在k时刻制定的未来k+j时刻输出变量的目标轨迹;Qj为k+j时刻控制输出与目标轨迹的差值的权重;Rj为k+j时刻控制输入量的权重;Qj和Rj为只有对角值的正定矩阵;p为预测时域;m为控制时域,控制时域一般小于等于预测时域,在控制时域之外到预测时域之间,假定没有控制动作。预测控制的控制目标可概述为采用较小的控制输入来实现较小的控制输出与输出目标的偏差。预测控制算法的目标函数通常是二次函数且权重矩阵为正定矩阵,保证了能通过二次规划求解得到全局最优解。
在明渠水位控制中,其控制目标则为

式中:ei(k+j|k)为系统根据k时刻初始状态预测的未来k+j时刻第i个渠池水位与目标水位的偏差值;ei,r(k+j|k)为系统在k时刻制定的的未来k+j时刻第i个渠池水位与目标水位的偏差目标值,当系统要求保持水位在目标水位且目标水位不随时间改变的时候,恒为零;ΔQi(k+j-1|k)为根据k时刻初始状态制定的k+j-1 时刻第i个渠池的进口流量调整变幅。通过求解式(8)即可得到最优的调控动作u(k+j-1|k)(j= 1,2,3,…,m),而只有第一步的控制动作u(k)被执行。由于向量u(k)中的元素为流量的调整变幅值,还需要将流量的调整变幅值转换为调控建筑物的动作。当调控建筑物为节制闸时,可通过过闸流量方程[23]反算得到实现流量变幅需要的闸门开度调整量。
3 多目标渠池水位预测控制模型
3.1 考虑流量调整惩罚的多目标预测控制在式(8)中,权重矩阵Q 中的元素值越大,则算法对水位偏差越敏感,采取的流量调控量越大,只有合理的权重设置才能在采取较小的流量调控量与实现较小的水位偏差间取得平衡。然而式(8)的目标函数中以流量变幅的二次方之和为量化指标,预测控制中多倾向于采用较小且频繁的流量调整动作而不是较大的流量调整动作,这样就会导致在发生较大的分水扰动情况时,预测控制中的闸门的流量调整变幅仍然较小且调控会较为频繁[24]。在以南水北调中线工程为代表的大型调水工程中,过于频繁的流量调整会带来调控设备的损耗,因此其流量调整的次数也是调控算法需要考虑的一个重要因素。为了能通过预测控制来生成合理的调控方案,还需要在预测控制的目标中加入闸门控制次数尽可能少的目标。这样调控目标就变为水位的偏差最小、流量调整动作最小及闸门动作次数最少三个目标。考虑到预测控制需要能直接生成最优的控制方案,因此同样将这些目标加权,作为流量调整惩罚部分合并到式(8)中,这样控制目标则变为:

式中:Li,j为用来表征流量调整的参数,当流量发生调控时值为1,当没流量调控时值为0;K 为Li,j的权重。
此时的控制目标函数不再是凸函数,通过可行方向法搜索得到的最优解无法保证为全局最优。为了得到可行性较高的最优解,本文采用带有精英排序策略的遗传算法来进行优化问题求解。在节制闸中,由于闸控设备的控制精度限制,很小的闸门开度变化指令没法被有效地执行,这种无法被执行的开度变化值被称为闸门的死区。闸门死区的存在带来了预测模型中的流量变幅的最小变幅约束。由于遗传算法能处理非凸规划下的最优化问题,因此在优化模型中设置优化变量的绝对值下限来考虑闸门死区带来的流量最小变幅约束。
3.2 基于积分时滞模型的预测模型改进在离散形式的积分时滞模型(5)和(6)中,时滞系统的时滞特性是通过滞后步长kd来表征,kd=τdTs。在时滞控制系统中,当τd不是控制时间间隔Ts的整数倍且有n <τdTs≤n+1(n为整数)时,常规的处理办法为取kd为n+1,在Ts相对τd较小的情况下,这种处理带来的误差比较小。然而在大型明渠调水工程中,由于前述的闸控次数的限制或在有较长调控间隔的调控要求情况下,其控制间隔时间Ts的取值会相对较大,可能会出现τd和Ts值比较接近甚至Ts大于τd的情况。以Ts大于τd的情况为例,此时n等于0,在k时刻对下游水位偏差e(k+1)-e(k)进行预测时,上游流量变化量Δqin(k)在k+1 时刻已影响到最下游水位,且影响的时长为Ts-τd,因此在计算e(k+1)-e(k)时,应该用Δqin(k)而非Δqin(k-1) 进行计算,且Δqin(k)乘以的时段长为Ts-τd;而Δe(k+1)含义为k+1 瞬时的水位变化率持续一个调控间隔时间下的水位变化量,则为Δqin(k)及出流Δqout(k)和Δqofftake(k)持续影响Ts时段长带来的变化量,因此Δe(k+1) 的计算用Δqin(k)乘以Ts。按照此思路,本文采用以下模型来对积分时滞模型(4)进行离散:

式中n为整数,且满足n <τdTs≤n+1。
4 计算实例
4.1 研究渠池本文选择南水北调中线干线工程的最后6 段串联渠池为研究对象,通过构造此渠池系统的仿真模型来模拟在预测控制下的渠池状态。仿真模型采用本文自主开发的水动力模型仿真平台[25]来构建;在水动力模型仿真平台中,闸门各个调控时刻的开度调整值由预测模型决定。研究渠池全长112 km,明渠断面都为梯形断面,每个渠池末端有分水口向用水户供水,各渠池的特征参数及初始流量值见表1所示。假设渠池系统上、下游分别为水深7 m 和3 m 的水位边界,初始时刻输水系统为稳定状态,各控制点水位都稳定在目标水位。在工程的实际调控中,各渠池控制点水位并不严格要求稳定在目标水位上,控制点水位可以在目标水位±0.1 m 的范围内波动。这是因为工程中,各个渠池的水深平均在4 m 以上,±0.1 m 的水位波动情况下,节制闸和分水口的过水流量的变化相对比较小,可认为供水量相对稳定,因此工程中对于±0.1 m 范围内的水位偏差的调控较少,来降低闸门的调控次数。

表1 研究渠池基本参数及初始工况下的流量、水位及积分时滞模型参数
研究渠池仿真模型运行的时间步长选择为1 min。为了检验调控算法的有效性,需要设置扰动来让渠池从稳态变为非稳态,然后用控制算法来进行水位控制。设置的扰动工况分为两种:工况一为渠池4 中的分水流量在4 h 时刻突然增加7 m3/s,且分水流量变化从调控者角度看为未知;工况二为渠池4 中的分水流量计划在4 h 时刻增加7 m3/s,此分水流量变化为预先制定好的。
4.2 控制算法参数设置优化控制模型的控制时间间隔Ts的选取需要综合考虑渠池的滞后时间及实际的调控需求。各个渠池的时滞时间为24 ~75 min,而考虑到中线的实际调控间隔都以小时为单位,因此控制时间间隔Ts选为1 h。对应的预测时域p设为10,这样预测过程可覆盖整个系统的时滞时长(约为5 h),控制时域m设为5。中线的闸门死区为3 cm,试算得到对应的流量变化值约为3 m3/s,因此在本文的控制模型中,流量的调控变幅的绝对值大于等于3 m3/s。式(9)的权重系数矩阵Q 和R中,可将R 中的流量调整的权重设置为1,然后调整权重系数矩阵Q 中的元素值。在本文的调控目标中也只对流量调整绝对值大于3 m3/s 的那部分调控量进行加权, 即式(9)中的ΔQi(k+j-1|k)变为(|ΔQi(k+j-1|k)|-3)。由于水位的偏差绝对值在0.1 m 范围内的允许度较大,在0.1 m 范围外的允许度较小,因此在权重系数矩阵Q 中,当水位偏差绝对值小于等于0.1 m时,对应的权重值为10,而当偏差绝对值大于0.1 m 时,其对应的权重值为30。闸门的控制动作权重K设置为1。本文的多目标预测模型采用遗传算法进行优化求解,遗传算法的参数设置见表2所示。

表2 遗传算法参数设置
本文中设置了传统的预测控制模型来作为对比。而为了规避由于权重参数设置导致的调控结果差异,在传统的预测控制模型中也设置了两组不同的权重值进行对比。在第一组权重设置中,权重系数矩阵Q 中对应于不超过0.1 m 水位偏差的权重为10,超过0.1 m 的水位偏差部分设置为30,具体的水位偏差权重设置方法可参考Hashemy[26]提出的水位偏差约束处理方法,此参数设置下的预测控制简记为MPC-I;第二组权重设置中,权重系数矩阵Q 中对应于不超过0.1 m 水位偏差的权重为0,超过0.1 m 的水位偏差部分设置为20,此参数设置下的预测控制简记为MPC-II。显然,MPC-I 对比MPC-II,其水位偏差控制更加严格,闸门的调控相对较为激进。在MPC-I 和MPC-II 中,采用二次规划算法来进行优化问题求解,而二次规划没法处理控制变量的最小变幅约束。针对这个问题,已有研究提出两种策略来处理闸门死区:一是直接忽略闸门死区导致地无法被执行流量调整指令,只有在流量调整下的闸门开度大于死区情况才执行;二是采用累积器的方式来处理闸门死区,即在预测控制生成的流量调整指令值不足以驱动闸门调控的情况下,将流量调整指令累积到下个时刻,通过累计的流量调整指令来生成有效的闸控指令[27]。由于第一种方法在闸门死区较大的情况下,需要足够大的水位偏差权重才能生成可被执行的流量调整指令,可能导致控制模型对水位偏差过于敏感而发生较明显的节制闸回调,从而造成渠池水位振荡[28],因此本文的研究案例中,在MPC-I 和MPC-II中采用累积器策略来处理闸门死区约束。MPC-I、MPC-II 和本文方法的控制模型参数设置见表3所示。

表3 MPC-I、MPC-II 和本文方法的控制模型参数设置
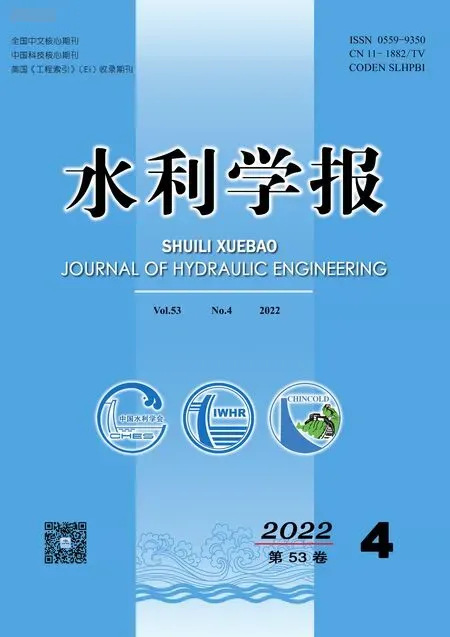
4.3 结果分析为直观展示控制算法在水位控制和闸控频繁程度上的差异,将控制模型调控下的各渠池控制点水位偏差过程和渠池进口节制闸闸门开度过程作为展示结果。首先将本文算法、MPC-I和MPC-II 算法应用于处理扰动工况一,三种控制算法的调控结果见图2、图3 和图4。
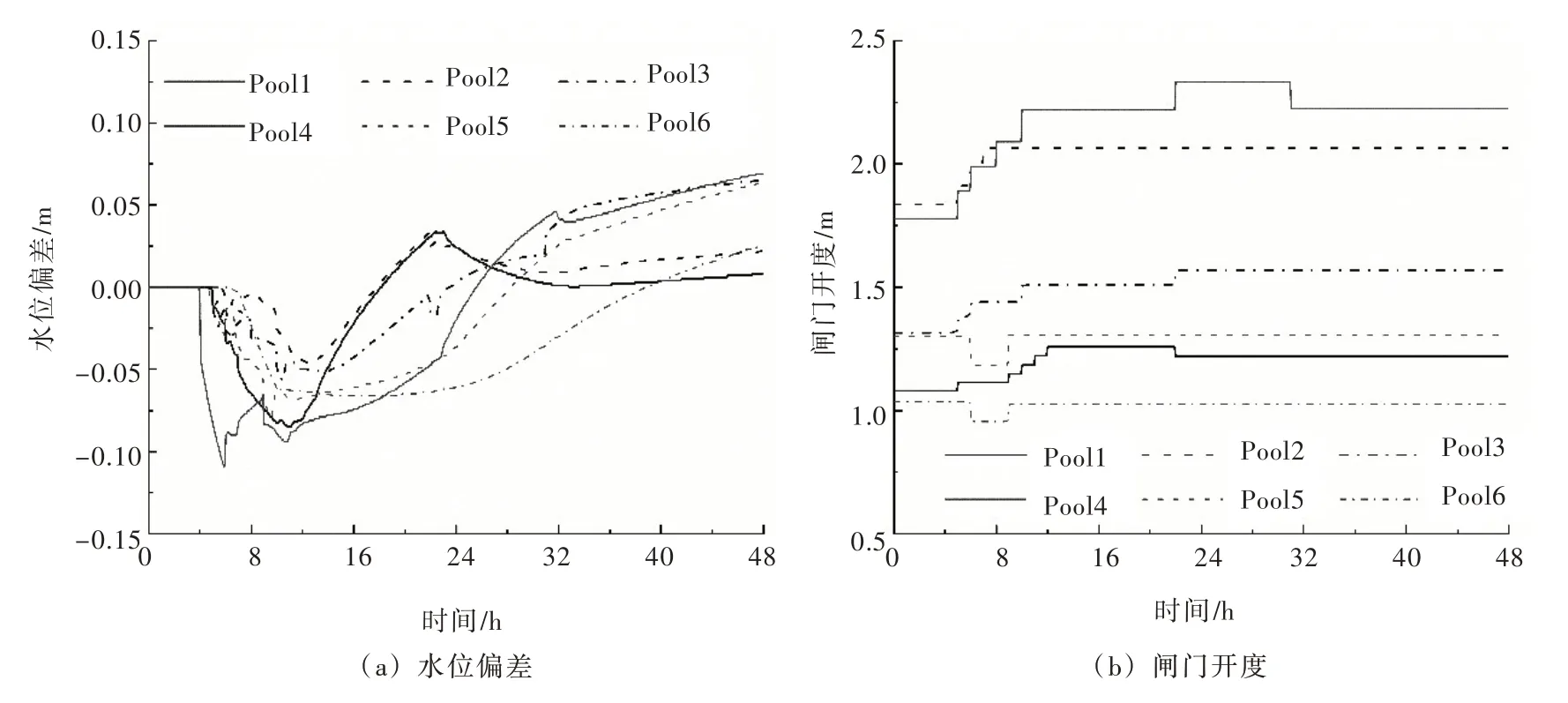
图2 本文多目标算法应用于工况一的控制结果
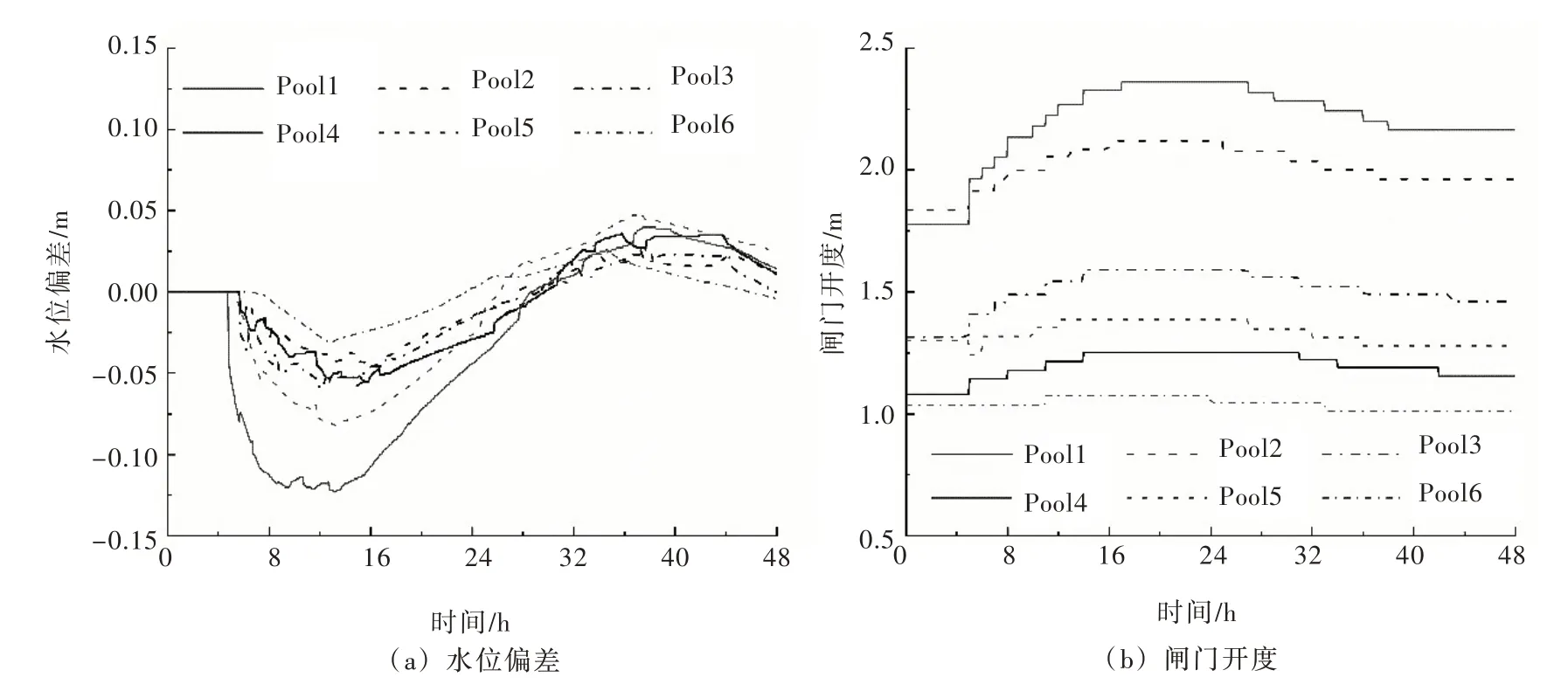
图3 MPC-I 算法应用于工况一的控制结果

图4 MPC-II 算法应用于工况一的控制结果
从图2(a)、图3(a)和图4(a)的水位偏差过程中可以看出,在本文优化控制模型、MPC-I 和MPC-II 的调控下,除了Pool 4 中的水位偏差略大于0.1 m 以外,其它渠池中的水位偏差都稳定在0.1 m 以内,说明控制算法都起到了较好的控制效果。而Pool 4 中水位偏差大于0.1 m,是因为分水变化发生在Pool 4 且分水变化未知,在预测控制模型中只能在发生水位变化后通过水位的变化速率来预测未来的水位变化趋势,而预测模型在感知到水位发生变化时,Pool 4 中的水位偏差已接近0.1 m。
图2(a)对比图3(a)和图4(a),最大的区别在于24 h 之后图3(a)和图4(a)中各渠池的水位偏差继续变小且变化趋势保持一致,而在本文优化模型中24 h 之后各个渠池中的水位偏差及变化趋势都不一致。这是因为在24 h之后在MPC-I以及MPC-II调控下仍然有较多的闸门开度调整造成的。对图2(b)、图3(b)和图4(b)中前24 h 和后24 h 内的闸控次数进行汇总,结果见表4。从表4中可以看出,在后24 h,多目标优化控制模型驱动下只有1 次闸门调控,而MPC-I 和MPC-II 模型驱动下分别有18 和19次调控。在传统MPC 模型中,即使当前水位偏差较小且调控目标中此部分水位偏差的权重较小(MPC-I 中为5,MPC-II 中为0),但是由于水位变化率的存在,预测模型预测未来的水位偏差仍有可能会超过0.1 m,因此会继续生成较小的流量调整指令,而这部分指令会由于累积器的作用累积到一定程度仍然被执行。而在本文优化模型的优化目标中由于流量调整惩罚的加入,在水位偏差及水位偏差变化率较小情况下就不再生产流量调整指令。

表4 工况一中各调控模型的闸控次数
在前24 h,三种模型调控下的闸控次数分别为22、34、29 次;同样地,由于流量调整惩罚的加入,本文优化控制模型中的闸控次数会相对较少;但由于此阶段全线的水位都处于快速的下降阶段,三种调控模型都需要采取较多的闸控来逐步调整水位。从48 h 内总的闸控次数来看,三种模型调控下的闸控次数分别为23、52、48 次;MPC-II 中的闸控次数相比MPC-I 的闸控次数降低的程度有限,说明降低权重并不能有效解决传统预测模型带来的控制频繁的问题;而本文多目标优化控制模型中因为加入了流量调整惩罚,闸控次数只有23 次,相比传统MPC 下的闸控次数下的48 次,闸控次数能降低52%,生成的闸控方案相对更加合理。
将本文优化调控模型、MPC-I 和MPC-II 应用于处理可预知的扰动工况二,三种控制模型的调控结果分别见图5、图6 和图7。工况二中的闸控次数结果汇总见表5所示。相比于工况一中的结果,在工况二中由于分水扰动可预知,因此在图5—7 中,在分水发生变化前其上游节制闸都开始了调控,三种模型都能有效地控制水位偏差在0.1 m 的偏差范围以内。而在前24 h,本文调控模型、MPC-I 和MPC-II 调控下的Pool 4 中最大负偏差分别为-0.06、-0.08 和-0.09 m,可见本文调控模型相比传统控制模型能更好地应对已知扰动。原因在于传统控制模型中因为求解算法的限制,只能采用累积器的方式来处理闸门死区问题,导致分水扰动发生前的小流量调整方案无法被及时地执行,而在本文调控模型的优化过程中考虑了闸门死区带来的流量最小变幅约束,因此分水扰动发生前的流量调整方案都是可被及时执行的,这样就能更合理地提前应对预知大分水扰动。

图5 本文算法应用于工况二的控制结果

图6 MPC-I 算法应用于工况二的控制结果
图7 MPC-II 算法应用于工况二的控制结果
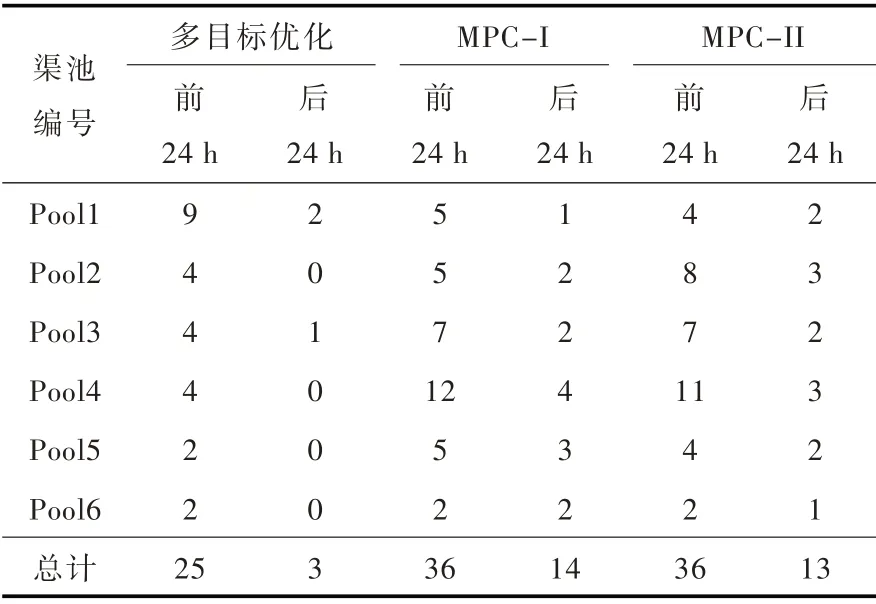
表5 工况二中各调控模型的闸控次数
在后24 h 内,本文调控模型对比MPC-I 和MPC-II 调控下的差异与工况一情况类似,图5 中的水位偏差相对更大、闸控次数更小,而MPC-I 和MPC-II 调控下水位偏差相对较小但闸控次数更多,调控次数分别为14 次和13 次。在后24 h,即使本文调控模型中的水位偏差相对较大,但是水位偏差并未超过0.1 m 的日常调控安全范围,且在28 ~32 h 之间,当Pool 5 和Pool 6 中水位偏差较大且有继续扩大趋势的情况下,通过1 次Pool 5 的进口闸门开度降低和2 次的Pool 1 进口闸门开度降低调控即可将全线水位变化趋势从上涨变为缓降。在整个48 h 内,本文优化调控模型、MPC-I 和MPC-II 下的调控次数分别为28、50、49 次,相比传统MPC 模型,本文多目标优化控制模型下的调控次数降低了43%。
4.4 讨论在本文的水位稳定控制研究案例中,传统预测控制模型目标形式中由于没有考虑流量调整惩罚,导致即使在较小的水位偏差情况下仍然会生成流量调整指令。由于实际工程受到外界扰动的影响,渠池水位始终会有一定程度的波动,这样就会带来闸门的持续频繁调控。本文优化模型中,由于考虑了优化变量的最小变幅约束并在优化模型中加入了流量调整惩罚,使得在较小的水位偏差情况下,不会再生成流量调整指令。因此,相比之下,本文的优化控制模型更能满足大型明渠调水工程中对有限闸控次数情况下的水位稳定调整需求。
传统预测模型的目标形式保证了其优化问题可通过矩阵计算进行快速求解,而本文多目标优化模型由于采取启发式算法进行求解,其计算时间相对较长。在本文研究案例中,传统预测控制模型单步的优化求解时间为3 s 左右,而本文多目标优化模型单步的优化求解时间为3 min 左右。复杂多目标预测控制模型的优化求解问题更容易受到“维数灾”的影响,优化模型的时域长度和空间尺度都受到限制。在将复杂多目标预测控制模型应用于处理大规模大维度问题时,采用启发式算法来求解很难保证预测控制每一步计算都能收敛到最优解,反而增加调控风险,此时应当将优化问题分解为多个子优化问题,再对子优化问题分别进行建模求解。
本文的多目标预测控制主要针对渠池水位控制中闸门调控不能过于频繁的需求对传统的预测控制模型进行了改造。在明渠的实时水力控制中,还有更复杂的控制目标是传统的预测控制模型无法处理的,也可采用本文的思路对预测控制目标和积分时滞模型进行改造后来开展多目标预测控制研究,以满足工程的实际调控需求。
5 结论
本研究中,提出了一种多目标预测控制模型来处理串联明渠调水工程中的水位稳定问题。将控制模型应用于南水北调中线干线工程最后6 级渠池的虚拟仿真模型,并与传统预测控制模型的调控结果进行了对比,得出以下结论:
(1)本文多目标预测控制模型中由于考虑了流量调整惩罚,因此在本文的两种研究工况中,能在不明显降低水位调控效果的情况下将闸控次数分别降低43%和52%,满足大型调水工程中对调控设备尽可能少参与调控的实际需求。
(2)基于积分时滞模型可构造渠池状态的实时预测模型,在此基础上可构造多目标滚动优化预测控制模型,并通过启发式算法进行求解来得到最优调控策略,此思路可处理复杂调水工程的多目标调控问题,满足工程的实际调控需求。