单框架控制力矩陀螺的试验与应用
2022-05-19黄剑鸣
郑宇(1993—),男,四川成都人,硕士生,研究方向主要从事两轮车自平衡仿真研究。
0 引言
控制力矩陀螺(Control Moment Gyro,CMG)是一种依靠恒定角动量以及框架组件驱动转子旋转输出力矩的重要力矩输出装置,一般由转子和框架两大核心部件组成,转子将以恒定的角速度旋转,提供一种恒定的角动量;框架则通过驱动转子围绕垂直于角动量的矢量方向的框架轴正(或负)时针旋转,通过框架旋转改变角动量时刻的矢量方向,实现框架轴向两端的力矩输出。在CMG的初始研究阶段,主要应用在国外研制的大型航天器上,例如美国的实验室、苏联空间站以及俄罗斯的空间站等。在2007年Worldview-1卫星成功进入轨道,这将标志着CMG正式应用于航空航天中,并对以后的空间发展有着重要的研究意义。
近年来,为了满足多样化的应用平台需求,CMG得到了很大的扩展,同时CMG的应用也不仅仅局限于卫星姿态研究中,同时已经扩展到陆地两轮车自平衡中,单钧麟
等人将CMG应用到两轮车中实现了两轮车的自平衡稳定控制,使车体具有一定的抗干扰能力;杨超平
根据CMG的进动效应开发了基于单框架控制力矩陀螺机构的主动安全控制方法;Park S H
等人将CMG应用到无人驾驶自行车中,研究了自行车在不同干扰下具有良好的主动平衡性能;Seekhao P
等人将CMG应用到电动自行车机器人中,得出了系统在平衡和直线路径跟踪方面都获得了较好的性能。在本文中,将采用两个单框架控制力矩陀螺并列安置的方式,进行工作原理理论分析以及试验,最后由试验得出的结论应用到两轮车上进行论证分析。
1 控制力矩陀螺理论
1.1 控制力矩陀螺的简介
单框架控制力矩陀螺(Single Gimbal Control Moment Gyroscope,简称SGCMG)
, 主要依靠驱动框架改变转子角动量方向,产生控制力矩。SGCMG可以采用体积较小的转子从而得到较大的输出力矩,使整个系统效能得到提高。控制力矩陀螺技术日趋发展,具有精度高、响应快、功耗低、力矩大等优点,使其在其他领域得到广泛应用,例如航空航天的卫星中、航海技术中的舰船横向平衡以及陆地中两轮车的自平衡。而在两轮车中,CMG又将体现出效率高、空间利用率高
、功耗低、可靠性高等优点,使得CMG在两轮车自平衡的研究中起到了重要作用。
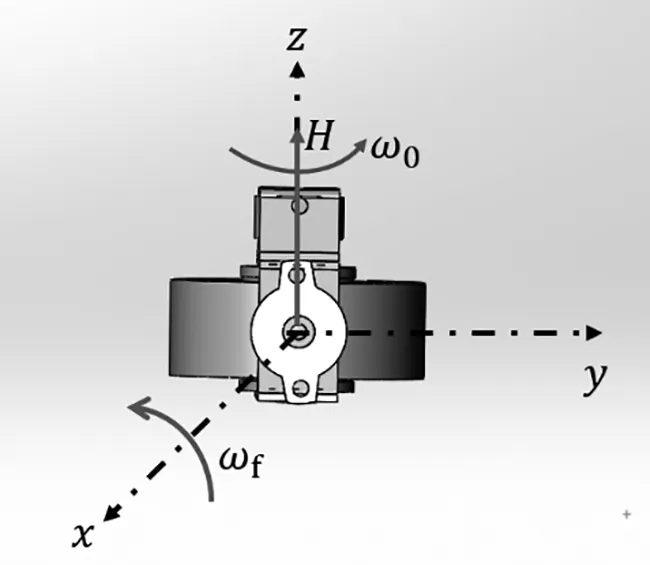
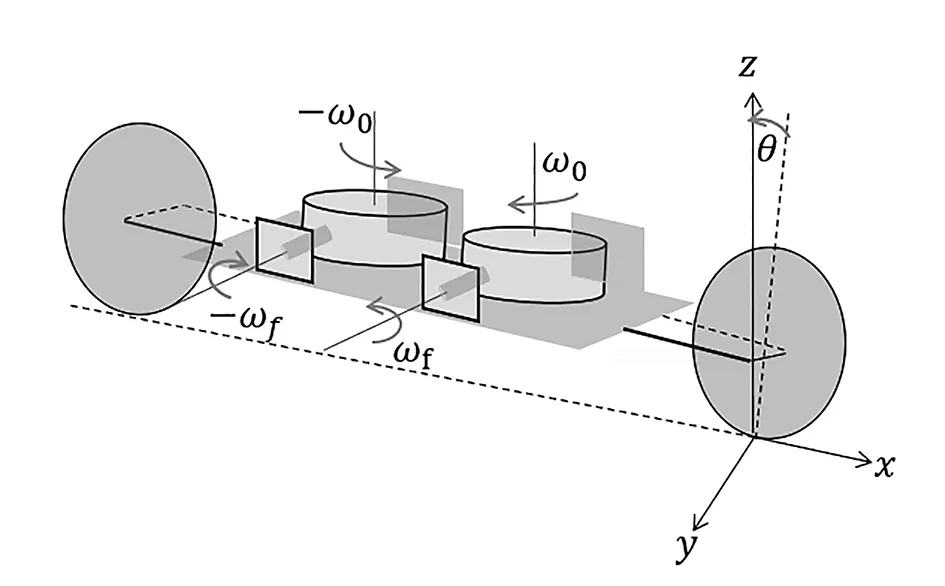
在本文中将采用两个SGCMG并列安置而成的一个组合控制力矩陀螺,根据单个SGCMG的工作原理,来剖析两个并列的SGCMG的工作情况,当单个框架旋转时,将会沿着框架轴向一端输出控制力矩,如图1所示。
根据图1可知,当转子以恒定速度转动时,会产生角动量如式1;同时,框架转动时将会输出控制力矩如式2所示:
=
(1)
=
cos
(2)
上式中:
表示陀螺的转动惯量,一般取数值为0.2kg·m
,
为转子的角速度,
为框架角速度,
为框架旋转角度,根据相关公式可得到输出力矩为
。
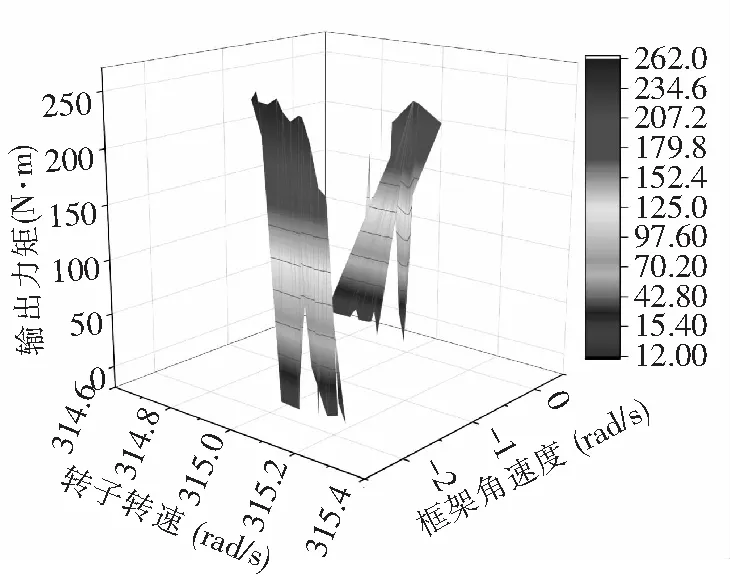
从图4中可知,CMG的输出力矩在一定范围内波动,在最后阶段会出现陀螺震动,导致数据会出现波动。
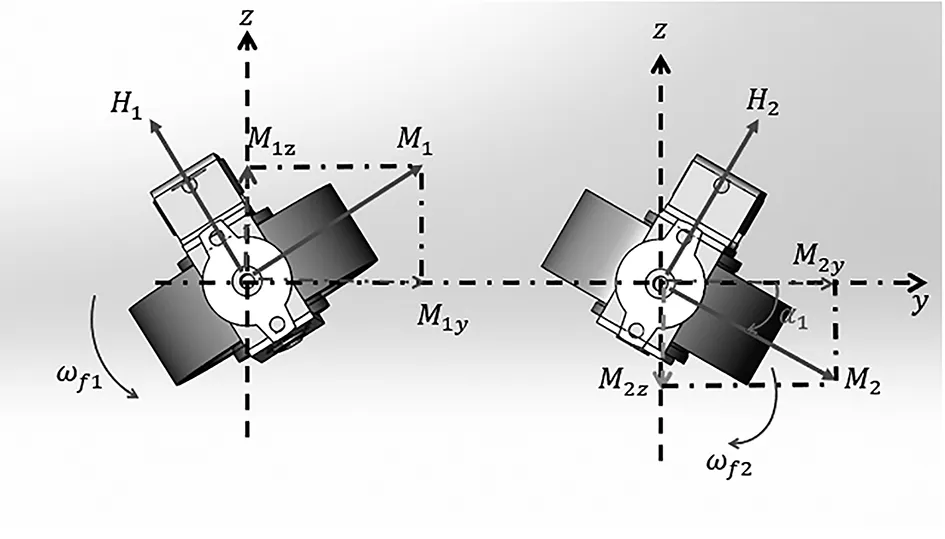
由图2可知:在Z轴向的力矩相互抵消,其余力矩进行累加,控制力矩陀螺输出的力矩M
如下式所示:
=2
=2
cos
故可知CMG的输出力矩的大小与转子转速和框架角速度有关
。
1.3 控制力矩陀螺的饱和奇异现象
根据前面介绍的CMG力矩输出的原理,当
越大时,输出力矩将会越小;当
=±90°时,输出的力矩将会为零
。
在CMG框架转动的时候,会出现不能提供控制力矩的位置,这个位置在本文中处于±90°,即角动量包络的内部由于构型原因使其无法提供控制力矩的现象称为奇异现象
。
(1)产能利用率波动和经济波动基本一致。从表2中产能利用率的结果可以看到,中国炼化产业产能利用率的波动与经济周期波动基本一致,在2008年之前,经济处于过热状态,伴随着中国经济高速增长,石油能源需求也源源不断,产能利用率处于不断上升趋势,在2008年产能利用率到达了一个峰值。受金融危机的影响,2009年产能利用率急剧下降;虽然2010~2014年产能利用率有所回升,但2015~2016产能利用率又急剧下降,产能过剩非常严重,2015年平均产能利用率仅为68%,2016年产能利用率72%,与石化预警报告基本一致,具有适用性。
通过上面陀螺的位置变化,避免了CMG出现奇异现象,增加了试验的可靠性。在本文中设置转子不同转速以及不同框架角速度,对CMG进行试验,实验结果如表1所示:
荸荠:购置于湖北省武汉市洪山区南湖大道菜市场。挑选大小均匀、无明显机械伤、无病虫害、成熟度一致的荸荠作为试验材料。
2 控制力矩陀螺的试验
上式中:
:两轮车的整车质量,取值256Kg;
:两轮车的质心高度,取值400mm;
:两轮整车侧倾角度;在文中将会采用转子转速为315rad/s,即输出力矩为262N·m,对两轮整车进行控制,可以实现两轮车从侧倾15度回到平衡位置。
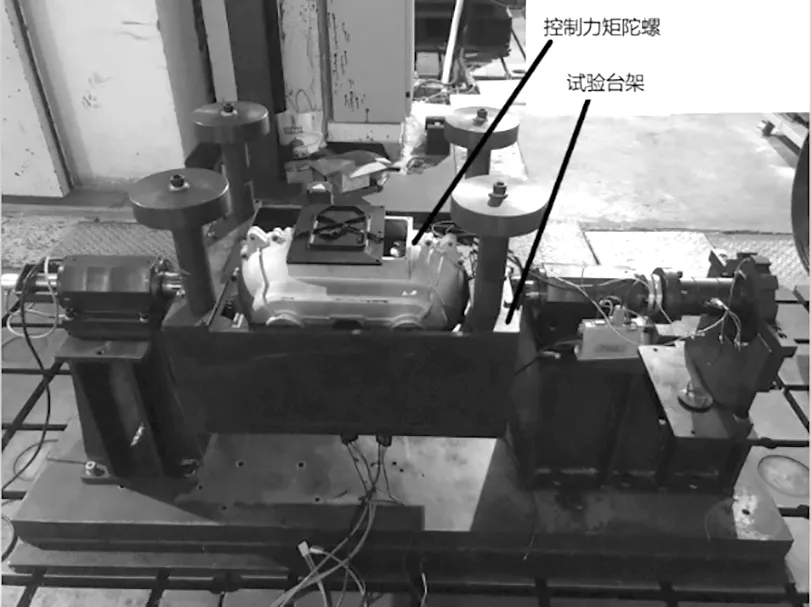
通过转子电机使转子以恒定角速度旋转,框架旋转主要通过控制程序将命令传给陀螺框架电机,使框架绕其轴正(或负)时针旋转,然后输出框架轴向的力矩。在试验平台中,需要准备力矩实验台架如图3所示。
在本文中进行CMG力矩试验时,由于考虑陀螺出现奇异现象,所以选择框架角度的范围值为(-90°,+90°),试验时,CMG的输出力矩将从零到最大值,最后减小到零。
关于共享经济的定义,切入角度不同,就会有不同见解。综合相关文献,本文认为共享经济是指社会海量、分散和闲置资源通过互联网技术被进行聚集、复用与供需匹配,从而最大限度发挥闲置资源作用,使得供需双方都能获得收益。
笔者从中国药科大学市场营销专业发展的现实需要出发,根据“标杆管理理论”,借鉴若干所国内外标杆院校的先进经验,形成该专业的发展思路,这有利于避免专业建设的盲目性。同时选取国外市场营销院校作为标杆,也有利于该专业的国际化发展。
在此持续改进模式建立基础上,恩泽集团以卓越运营模型“授权-培养-共识-结果”为改善操作框架,进行精益医疗战略部署。

CMG的饱和现象从某种意思来说
,陀螺在特定方向上持有的角动量已经超过此时所能容纳的最大角动量,最终造成输出的力矩很小。当抵抗外力矩达到平衡状态时,框架会保持在一个固定位置即距离水平位置更近;最后使得它们的总角动量矢量的前向分量比以前更大。
选择其中转子转速为315rad/s、框架角速度为2.10rad/s根据试验电脑绘制出输出力矩、转子转速、框架角速度之间的关系如图4所示:
图中整个力矩试验台架放置在安静环境的室内,减小外界因素对试验结果造成的影响。
当两个SGCMG并列排布时,两个陀螺的输出力矩需要对其进行相关的设计,在本文中,将会设置两个转子的角速度大小相等、旋转方向相反;框架的旋转方向相反
,这样可以使两个SGCMG的输出力矩累加在一起,同时力矩方向与单个SGCMG的一样。其并列SGCMG示意图如图3所示。
从表1中可知转子转速从105、210、315、420、523rad/s依次进行角速度为1.05、1.57、2.06、2.62、3.14rad/s五个等级的部分数据试验,表明了试验结果与理论结果在一定误差范围内是相等的,同时也表明了控制力矩的输出范围为(0,656.89N·m),单个SGCMG的角动量范围在(21,104.6N·m·s)。
3 控制力矩陀螺的应用
CMG在很多地方都得到广泛应用,随着科技的发展,两轮自平衡车应运而生,在生活里为人们提供了一种新型的代步工具。为了提高CMG对两轮车的控制能力
,根据上文的力矩试验结果,将其作为输入条件放置在两轮整车环境中,对两轮车的侧倾自平衡进行控制,在本文中,对两轮整车进行相关的力矩动态平衡进行分析,本文将两轮整车放置在水平位置,其结构示意图如图5所示:
以颈内动脉系统受累为主的可逆性后部脑病综合征1例报告 … ……………… 黄楚欣,郑乾,秦利霞,等 36
CMG对两轮车的平衡主要依靠CMG输出的控制力矩对整车的重力矩进行平衡,如下式所示:
sin
≤2
cos
(6)
在本文中,通过力矩陀螺的理论分析,进行理论实践的验证;文中将采用的SGCMG并列安置在一起,然后对其结构进行剖析。
实验场景图如下图所示:
3.4 执行功能 执行功能主要指机体对事项及行动进行意识控制的相关心理过程,其在认知过程中属于较为复杂的方面,其主要涉及注意力、行为能力、计划、程序化思维、创意和决策、抽象概念的形成等能力。张宝和等[22]研究中对325例高龄失眠患者进行检查,发现失眠患者多存在视看空间、形象力、执行力等受损,且研究证实高龄离退休老年人睡眠质量较差,睡眠质量与认知损害存在相关性。Haimov等[23]研究中也发现老年失眠患者普遍存在记忆广度、执行功能、注意分配等下降的现象。
从图6和7可知,CMG能够使侧倾15°的两轮车实现自平衡,并达到稳定状态。试验结果图如下所示:

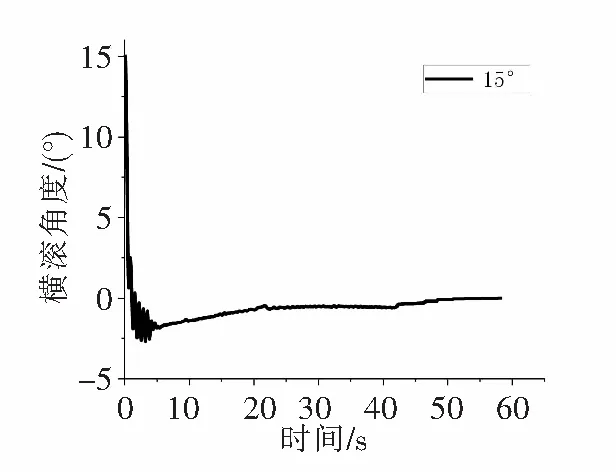
从图中可知,两轮车在CMG作用下实现了从侧倾15°位置回到平衡位置的控制过程,并一直保持着稳定状态。
2018年9月18日,该设施向一小片压水堆燃料发射了持续几秒的中子脉冲,对该燃料进行了辐照和加热。这意味着美国恢复了一种对于核燃料研发至关重要的能力。美国的在运核电机组以及未来的先进反应堆均将因此受益。
4 结论
在文中对CMG进行相关的工作原理阐述,分析了单个SGCMG和两个SGCMG并列安置的区别,并使用试验台架对CMG进行相关的试验,最后将CMG应用到两轮车中,得出了以下几点:
(1)根据试验分析可知并行排列的SGCMG能够输出的控制力矩范围为(0,656.89N·m),SGCMG的角动量范围在(21,104.6 N·m·s),对比以前的单个SGCMG,角动量得以增加,并其输出力矩是原来的一倍,在实验中采用框架角度范围为(-90°,+90°),规避了CMG发生奇异现象。
(2)通过CMG的实验结果数据,应用到两轮车中,实现了两轮车侧倾15°回到平衡位置,对其自平衡具有较好的控制效果,对两轮车的自平衡的研究提供了可靠的依据。
[1]单钧麟,汪立新,秦伟伟等.一种改进的陀螺自平衡车自抗扰控制方法[J].现代电子技术,2020,43(14):38-41+47.
[2]杨超平. 基于侧倾力矩控制的铰接转向工程车辆主动安全控制研究[D].厦门大学,2018.
[3]Park S H , Yi S Y . Active Balancing Control for Unmanned Bicycle Using Scissored-pair Control Moment Gyroscope[J]. International Journal of Control, Automation and Systems, 2020, 18(1):217-224.
[4]SeekhaoP ,Tungpimolrut K , Parnichkun M . Development and control of a bicycle robot based on steering and pendulum balancing[J]. Mechatronics, 2020, 69(4):102386.
[5]翟华,来林,武登云等,控制力矩陀螺发展与应用研究[J].空间控制技术与应用,2020,v.46;No.269(02):1-7.
[6]黄志来,李新圆,金栋平.单框架控制力矩陀螺输出特性分析[J].力学学报,2021,53(02):511-523.
[7]Chen C K , Chu T D , Zhang X D . Modeling and control of an active stabilizing assistant system for a bicycle[J]. Sensors, 2019, 19(2).
[8]Yan Z , Jiang H W , Qi W . Algorithm and achieve of self-balancing two-wheeled control system based on PID neural network[C]//Sixth International Conference on Electronics and Information Engineering. International Society for Optics and Photonics, 2015.
[9]Liu K , Ming B , Ni Y . Two-wheel self-balanced car based on Kalman filtering and PID algorithm[C]//2011 IEEE 18th International Conference on Industrial Engineering and Engineering Management. IEEE, 2011.
[10]Hl A , Dk B . Singularity-robust control moment gyro allocation strategy for spacecraft attitude control in the presence of disturbances[J].Chinese Journal of Aeronautics ,2021,33(10):2728-2742.
[11]冯骁, 贾英宏, 徐世杰. 控制力矩陀螺驱动空间机器人的角动量平衡控制简[J]. 北京航空航天大学学报, 2017, 43(6):8.
[12]刘雪薇. 双轮自平衡小车的建模与控制方法研究[D]. 武汉理工大学.
