基于重载四旋翼无人机结构设计
2022-05-18李垚郑鹏
李 垚 郑 鹏
沈阳工业大学机械工程学院 沈阳 110870
0 引言
四旋翼无人机是一种通用性能多用途广泛的航空航天飞行器,被广泛应用于测绘、植保、消防等场合。目前,无人机市场上大多是电动无人机。电动无人机通过电机和电调进行驱动,通过电线连接旋翼传动,但其承载能力和续航时间尚有欠缺,一些公司设计的小型油动无人机载重轻、续航能力不足。本文设计的油动无人机具有大载重、长时间续航的优势,以发动机作为动力的主要来源,利用带传动的传动系统将扭矩传到2根支臂轴,支臂轴末端为90°布置的锥齿轮,锥齿轮上端连着旋翼,旋翼转动带动整机飞行工作,故传动系统是油动重载四旋翼无人机的重要结构系统。为了能使油动无人机保证良好工作状态以及寿命,必须保证传动系统的传动精度、零件强度和整个装配体强度。本文设计的无人机以碳纤维为传动轴外壳,铝合金为主要支撑部件(见图1),可带动整个传动系统工作。
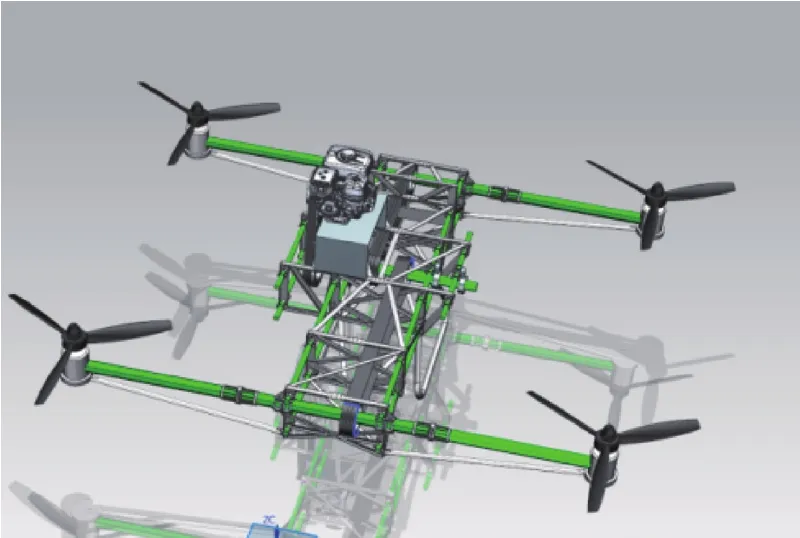
图1 油动重载四旋翼无人机整机
复合材料是一种高性能新型特定加工成型的材料,具有质量轻、强度高、可设计性等优点,复合的目的是要改善材料的性能,确保用复合材料制成的材料有特定的力学性能,如受扭矩载荷、拉力载荷、弯矩载荷等。复合材料按使用要求大致分为结构型复合材料和功能型复合材料,在航空领域,目前和今后几十年的发展主流是用于制造航天飞行器结构件的碳纤维增强树脂基复合材料,在此基础上发展结构复合材料,以提高航天器的技术水平。
1 机架结构设计
1.1 设计方案
该方案的基本设计要求有:1)整机长4 300 mm,宽3 700 mm,高1 600 mm;2)动力源件为发动机;3)传动轴为碳纤维材料减轻机身自重;4)为防止轴加工长度过长,将轴分为3段并用联轴器连接。根据以上要求和飞行器飞行的基本原理,初定无人机传动系统为工字形,如图2所示。
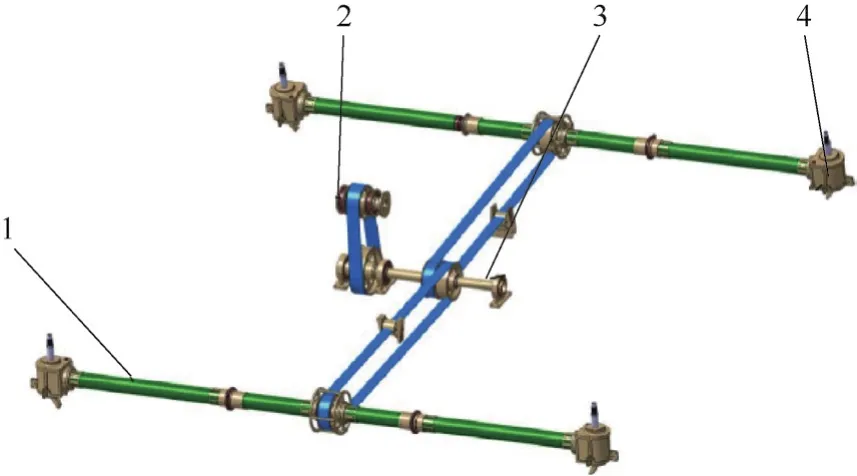
图2 传动系统布局
1.2 整机重要部件参数的选取
根据整机的布局、旋翼额定功率30 kW、额定转速3 000 r/min,合理选取发动机功率、中间轴转矩、齿轮箱转矩等组成部分的材料参数,并计算最大升力,设计中的其他参数选取如表1所示。
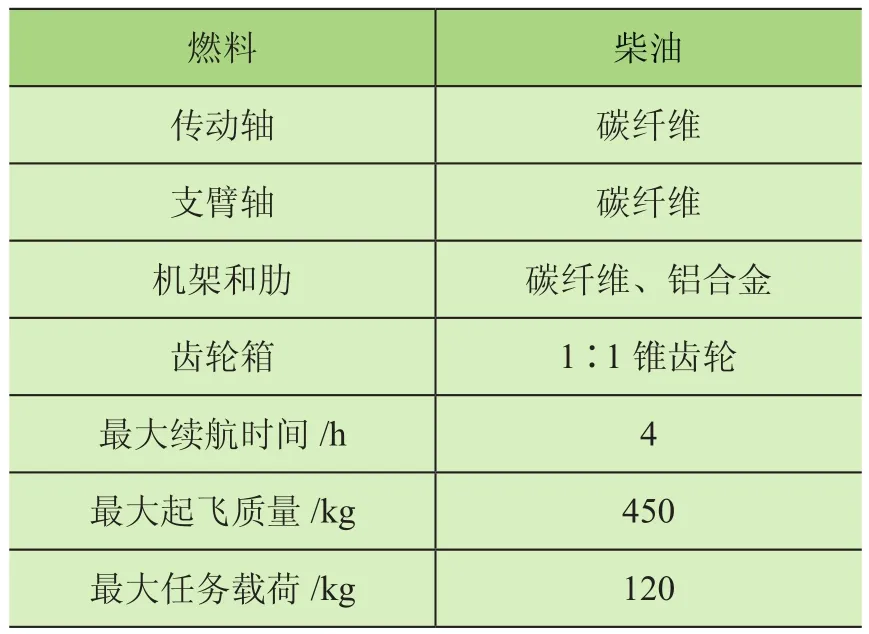
表1 无人机其他材料参数
1)发动机功率
考虑发动机在传动过程中的摩擦损耗,分析给出发动机功率135 kW,转速为3 000 r/min。
2)中间轴转矩
发动机按照1:1.3的转速比将输出传递到中间轴,故中间轴转矩为
考虑中间轴为动力输出中心,中间轴的安全系数取1.5,最后中间轴实际传出的转矩为837 N·m。
3)齿轮箱转矩
中间轴通过带传动将转矩按1:1的比例传递到2个支臂轴,支臂轴再按照1:1的比例将转矩传到齿轮箱,故齿轮箱的转矩为
4)旋翼总升力
齿轮箱内部为90°布置1:1传动的锥齿轮,锥齿轮模数为5,齿数为16,故一个旋翼的升力为
其中,α= 20°,β= 45°。
整机所能提起的总升力为
1.3 机架的结构设计
为了保证2根支臂轴之间相对稳定,机架中间应设计为塔式形状,用铝合金肋板将各组成件相互连接,机架结构模型如图3所示。将中间轴与支臂轴用铝合金肋板连接成为一个整体,将支臂轴分为3段相同的轴端,并用联轴器和轴套连接。
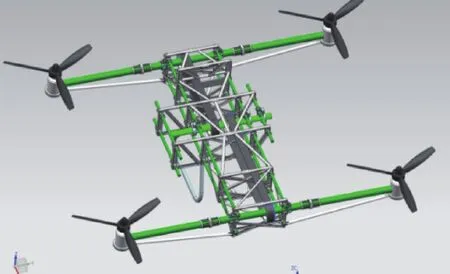
图3 油动四旋翼无人机机架结构
2 机架结构的静力学分析
2.1 机架结构的静力学分析
将图3所示通过ug建模后的装配体进行文件转换,导入Ansys Workbench有限元分析软件中,根据工作实际情况对整机施加约束并进行静力学分析,对每个旋翼施加竖直向上的升力,升力为1 400 N。将整机的中心位置进行固定,计算得到的图4所示最大位移和应力云图,整机最大位移量为0.004 7 mm,最大应力为3.94 MPa。
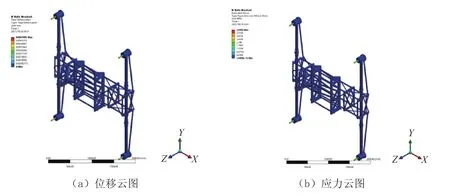
图4 整机位移与应力云图
2.2 机架结构的模态分析
对前述导入的无人机整机模型进行无约束的自由模态分析,提取图5所示前4阶非刚性模态振型云图,并与整机部分组成件的无约束模态进行频率对比。通过分析软件计算的自由模态分析的前4阶频率(见表2),整机各组成件的固有工作频率均在200 Hz以上,与整机固有工作频率19.28 Hz相比相差较多。因此,此次设计的油动重在四旋翼无人机机架不存在整机和组成件之间的共振现象,同时强度刚度等均远低于铝合金材料的需用参数,本次机架结构设计符合实际要求。
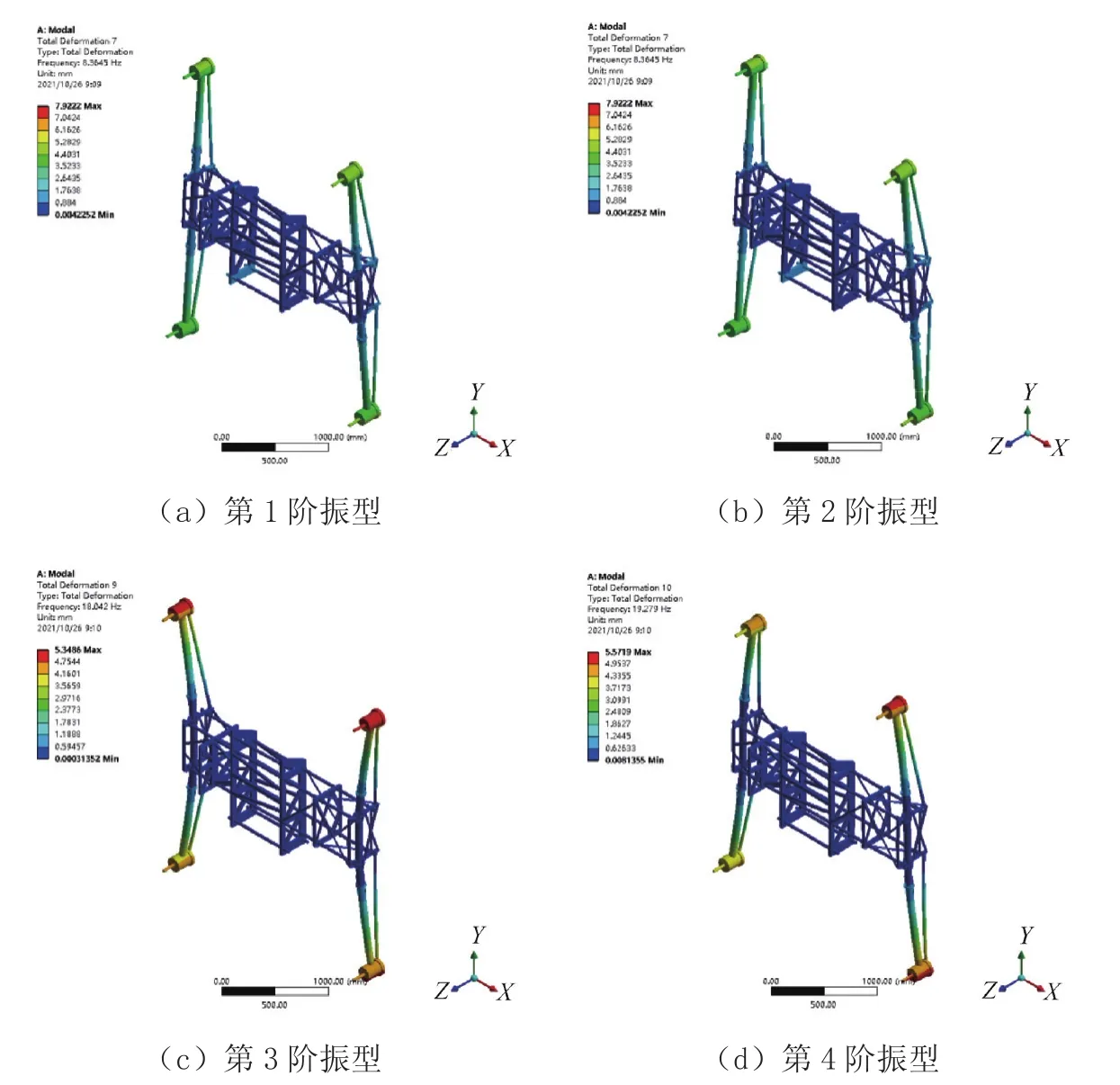
图5 前4阶非刚性模态振型云图

表2 前4固有频率
通过分析以上数据,整机结构的最大位移量较小,最大应力远小于材料的许用应力,整机与组成件频率差距过大,不会发生共振现象。机架1~4阶振型显示整机变形均发生在支臂轴与支臂轴连接的组成件处,主要原因为支臂轴长度过长出现变形。
3 结论
1)查询相关设计手册,计算整机最大的工作应力,合理选择无人机重要组件材料参数,通过ug建模软件对传动系统部位进行机架设计。
2)静力学分析结果显示,无人机整机结构的最大位移较小,最大计算应力值远远小于零件的许用应力值,结构的力学性能满足设计要求。 通过对机架结构无约束的自由模态分析结果表明:整机机架的最大固有工作频率远远小于各组成件的固有工作频率,能有效避免共振现象的发生,整机的各项动力性能指标均满足设计要求。此次设计计算的研究结果给四旋翼无人机整机机架结构设计创出了一条新的思路,为实现重载油动四旋翼无人机运行使用提供了一个新的研究方向。
