有向网络拓扑下非线性多智能体系统的固定时间包含控制
2022-05-18唐朝君余湛魏正元
唐朝君 余湛 魏正元
0 引言
近年来,多智能体系统一致性问题的研究吸引了来自计算机应用、自动控制、数学等领域研究学者的关注[1-4].其中系统中含有多个领导智能体的跟踪问题也被称为包含控制问题,包含控制在军事和民用领域都有着广泛的应用.在研究多智能体系统的有限时间一致性问题中,文献[5]构建了一个有效的分布式协议框架,在此协议下解决了有限时间的一致性问题,文献[6]通过二重积分器设计了用于实现在干扰下有限时间一致性问题的分布协议,文献[7]研究了在外部干扰下的非线性多智能体系统,通过利用滑模控制技术解决有限时间一致性的跟踪控制问题.然而上述文献的收敛时间是与初始状态息息相关的,因此,初始状态无法影响收敛时间的研究成为一个重要课题.文献[8]通过研究固定时间稳定性,从而提出了固定时间一致性问题,并且保证了收敛时间是与初始状态没有关系的.对于带有外部干扰的多智能体系统,文献[9]通过设计非线性协议解决了固定时间一致性问题.对于非线性的多智能体系统,并且该通信拓扑是有向的,其固定时间一致性问题在文献[10]中被解决.在多智能体系统包含控制问题中,文献[11]提出了固定无向网络拓扑下的包含控制问题,文献[12]研究了多智能体系统分别在静态和动态领导下的包含控制问题,文献[13]通过齐次控制技术设计了用于实现有限时间包含控制问题的控制协议,文献[14]针对有向切换网络拓扑研究其包含控制问题.但是在已有文献中,对固定时间包含控制的研究结果还比较少.特别是对于有向网络拓扑下固定时间包含控制的研究,相关的研究结果更少.
基于上述原因,本文在文献[10]的基础上,通过设计更加一般的非线性系统和控制协议,研究多个领导的包含控制问题.本文与文献[10]的不同主要体现在两个方面:第一,文献[10]研究的是具有单个领导智能体的领导-跟随一致性问题,本文研究的是具有多个领导智能体的包含控制问题,文献[10]是本文的一个特例;第二,本文将文献[10]中的控制协议进行了推广,更具一般性.本文利用代数图论、矩阵理论和固定时间稳定性理论给出系统解决固定时间包含控制最弱的拓扑条件.

1 预备知识
1.1 图论
1.2 相关引理
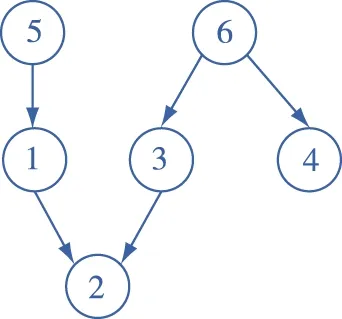
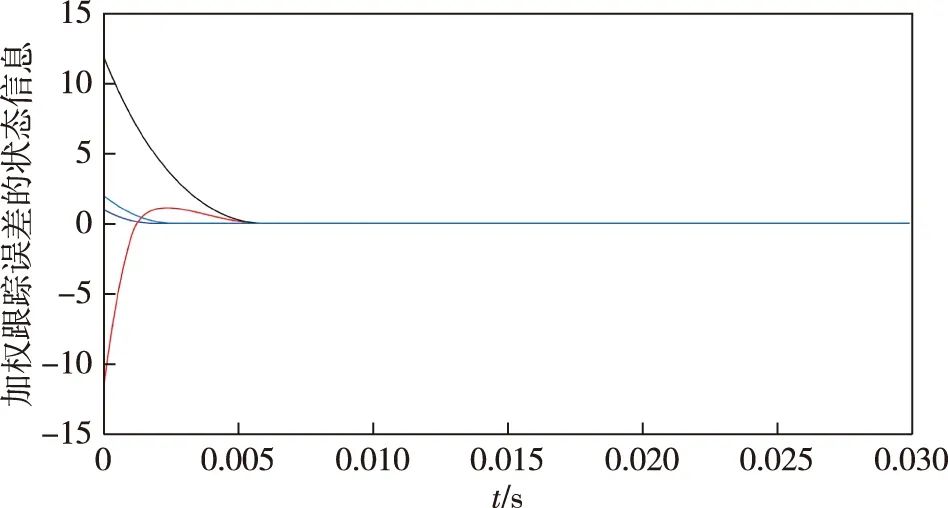
引理1[16]令x1,x2,…,xn≥0,0 (1) 引理2[8]考虑如下系统: (2) 其中:x(t)∈Rn表示信息状态;f:Rn×R+→Rn是连续非线性函数.假设原点是平衡点,如果存在一个连续的径向无界函数V:Rn→R和一些常数a,b>0,0<μ<1<ν使得: (3) 则原点是全局固定时间稳定,且满足: (4) 设所研究的多智能体系统包含m个跟随智能体和n-m个领导智能体,分别用F={1,2,…,m}和S={m+1,m+2,…,n}表示跟随智能体和领导智能体的集合.该系统的动力学模型为 (5) 其中:xi(t)表示第i个智能体在时刻t的信息状态;ui(t)∈R是第i个跟随智能体的控制输入;f(xi(t),t):R×R→R是第i个智能体的非线性动态. 定义1如果存在控制协议ui,i=1,…,m,且对于一个不依赖于初始值的正实数T和有界正常数Tmax,满足T (6) 则称该协议解决固定时间包含控制问题. 假设1对于每个跟随智能体,都存在来源于领导智能体的有向路径. 为研究方便,将Laplacian矩阵L写成如下分块矩阵的形式: (7) 其中L1∈Rm×m,L2∈Rm×(n-m). 定义2[18]若对于一个非奇异的实方阵A,其非对角线元素是非正的,并且每个特征值具有正实部,则称矩阵A是M-矩阵. (8) 由假设2明显看出当m=n-1时,即系统只有一个领导智能体时,该条件为Lipschitz条件. 考虑如下控制协议: (9) 其中β≥α>0,μ>1>ν>0. 令 xF(t)=(x1(t),x2(t),…,xm(t))T, xS(t)=(xm+1(t),xm+2(t),…,xn(t))T, F(xF(t))=(f(x1(t),t),…,f(xm(t),t))T, F(xS(t))=(f(xm+1(t),t),…,f(xn(t),t))T, 则有: L2xS(t))[ν]+F(xF(t)). (10) 令加权跟踪误差δ(t)=L1xF(t)+L2xS(t),可以得到: L1(-αδ(t)[μ]-βδ(t)[ν])+ L1F(xF(t))+L2F(xS(t)). (11) 在下文中,为了表示方便,在不引起混淆的情况下,我们有时去掉时间变量t.下面给出本文的主要结论. 定理1在假设1和假设2的条件下,如果控制增益参数α,β满足以下条件: (12) 则协议(9)解决固定时间包含控制问题. 证明首先构造如下李雅普诺夫函数: (13) 其中W=diag(w1,w2,…,wm)是引理4中定义的对角阵. 对其求导得到: -(αδ[μ]+βδ[ν])TWL1(αδ[μ]+βδ[ν])+ (14) 又由于β≥α>0,所以 ‖δ[μ]+δ[ν]‖2. (15) (16) 再由假设2可以得到: (17) (18) 又根据β≥α>0,所以 ‖δ[μ]+δ[ν]‖2. (19) -γ‖δ[μ]+δ[ν]‖2. (20) 又由于 (21) (22) (23) 即 (24) (25) (26) 即 (27) 最后结合不等式(20)、(24)和(27),可以得到: (28) (29) 图1 系统的通信拓扑Fig.1 System communication topology 图2 加权跟踪误差的状态随时间的变化曲线Fig.2 State curve of the weighted tracking error over time 多智能体系统的通信拓扑如图1所示,分别由2个领导智能体(用顶点5、6表示)和4个跟随智能体(用顶点1、2、3、4表示)组成.设智能体的非线性动态为f(xi,t)=xisint.当l=1时,满足条件假设2.经过计算,取对角矩阵W=diag(2,0.8,1,0.5),选择参数μ=1.5,ν=0.5,α=30,β=35,取跟随智能体的初始状态xF(0)=(5,-2,3,-7)T,领导智能体的初始状态xS(0)=(4,-9)T,可以得到初始加权跟踪误差的状态δ(0)=(1,-12,12,2)T,加权跟踪误差的状态随时间的变化曲线如图2所示.从图 2可以看出,加权跟踪误差大约在0.01 s内收敛到0,比Tmax=0.89 s要小得多,这意味着系统能在固定时间内解决包含控制问题,验证了理论结果的正确性. 本文研究了非线性多智能体系统在有向网络拓扑下的固定时间包含控制问题.假设所有智能体之间的通信拓扑是有向的,而且每个跟随智能体都至少有一个领导智能体能够直接或间接地与其通信,在这最弱拓扑条件下,所给出的控制协议能够解决固定时间的包含控制问题.仿真实例验证了所提理论结果的正确性.



2 模型描述与结果




















3 数值仿真
4 结论
